Inspiration
The janitor working hard and walking around to help clear the trash bin.
What it does
once it detects it is full, it will send a signal to the robot and it will exit the bin, and moves to the central garbage disposal in the mall and a new garbage go that is empty with a new trash bag will move into the bin.
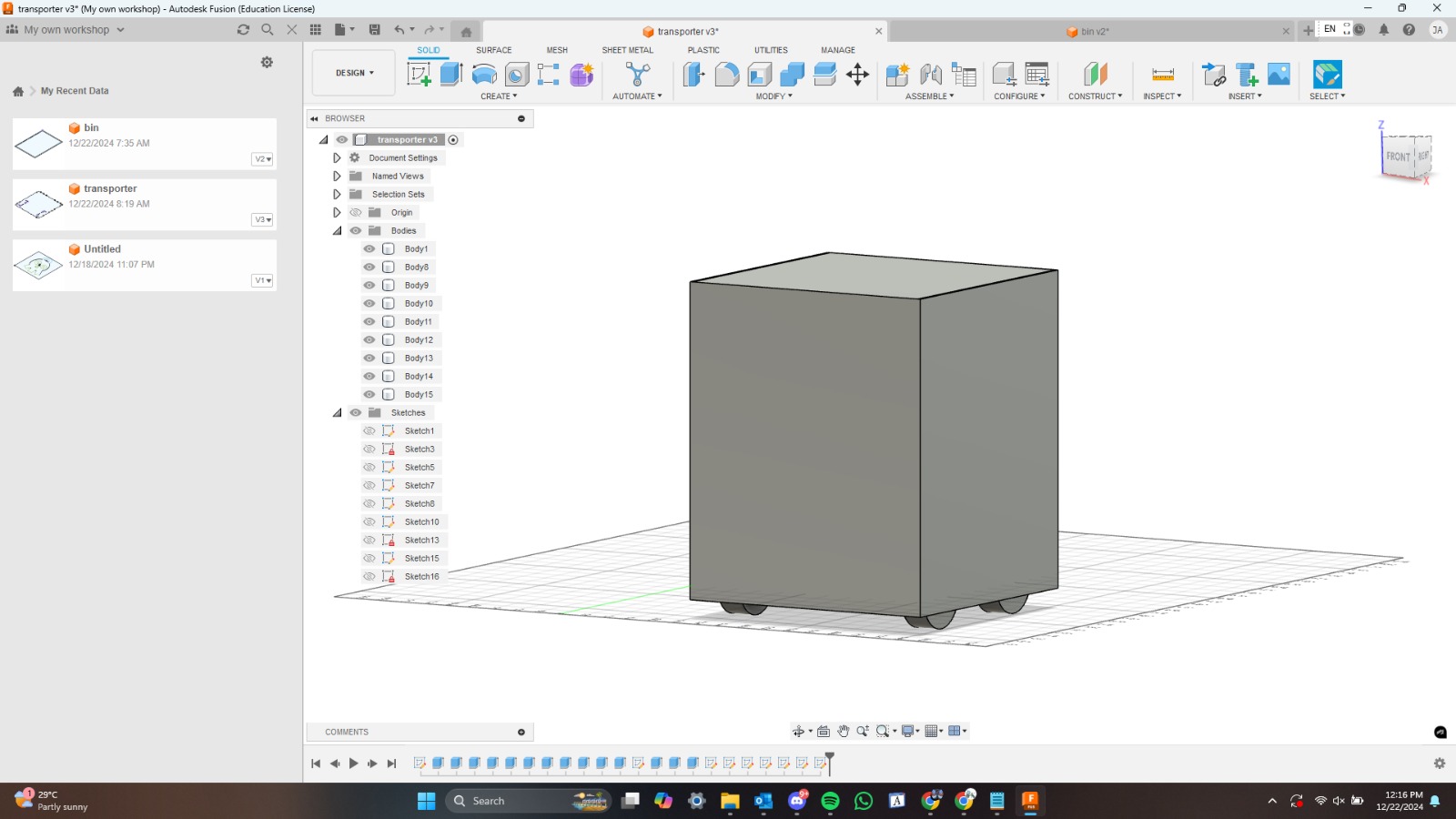
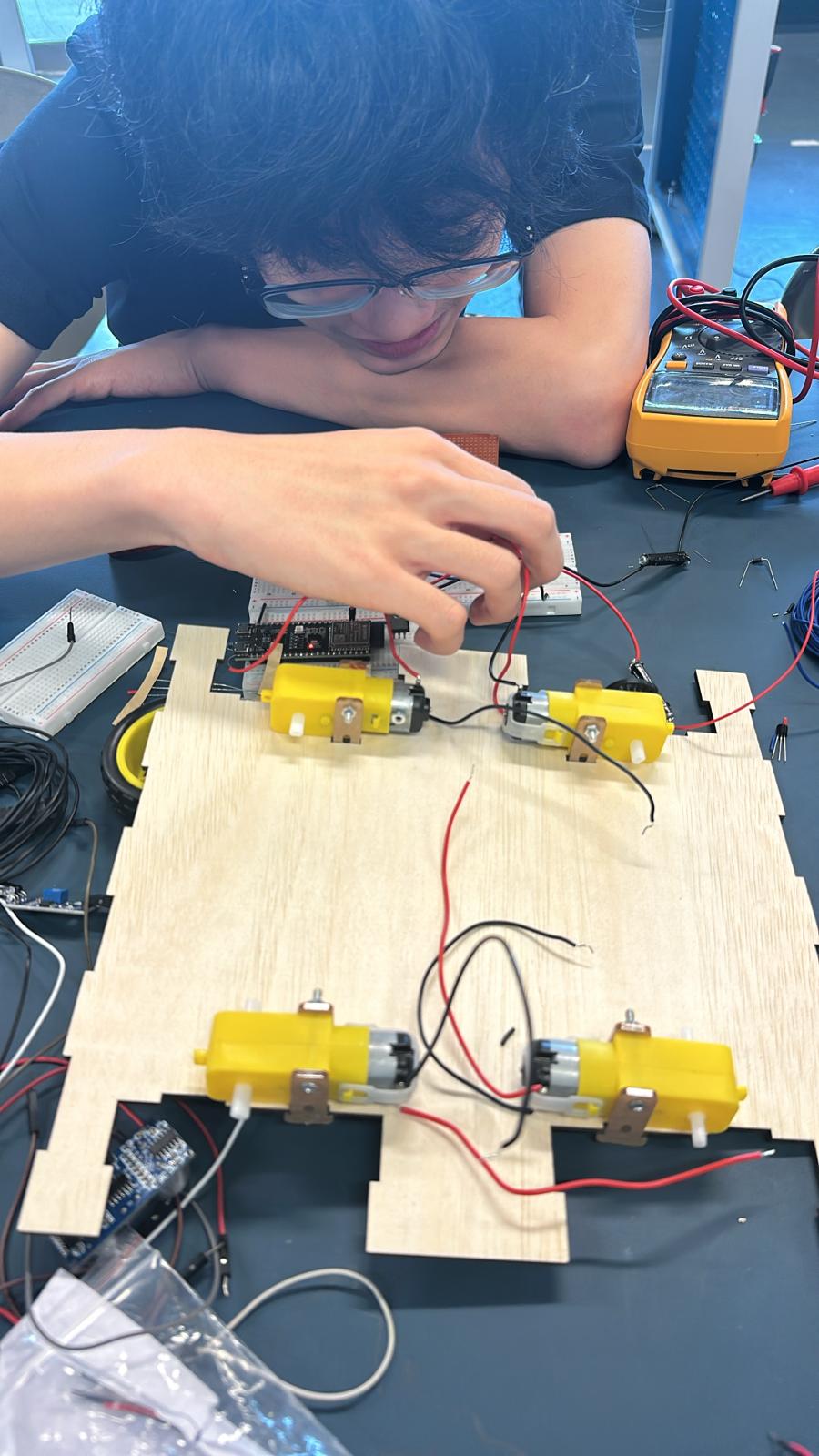
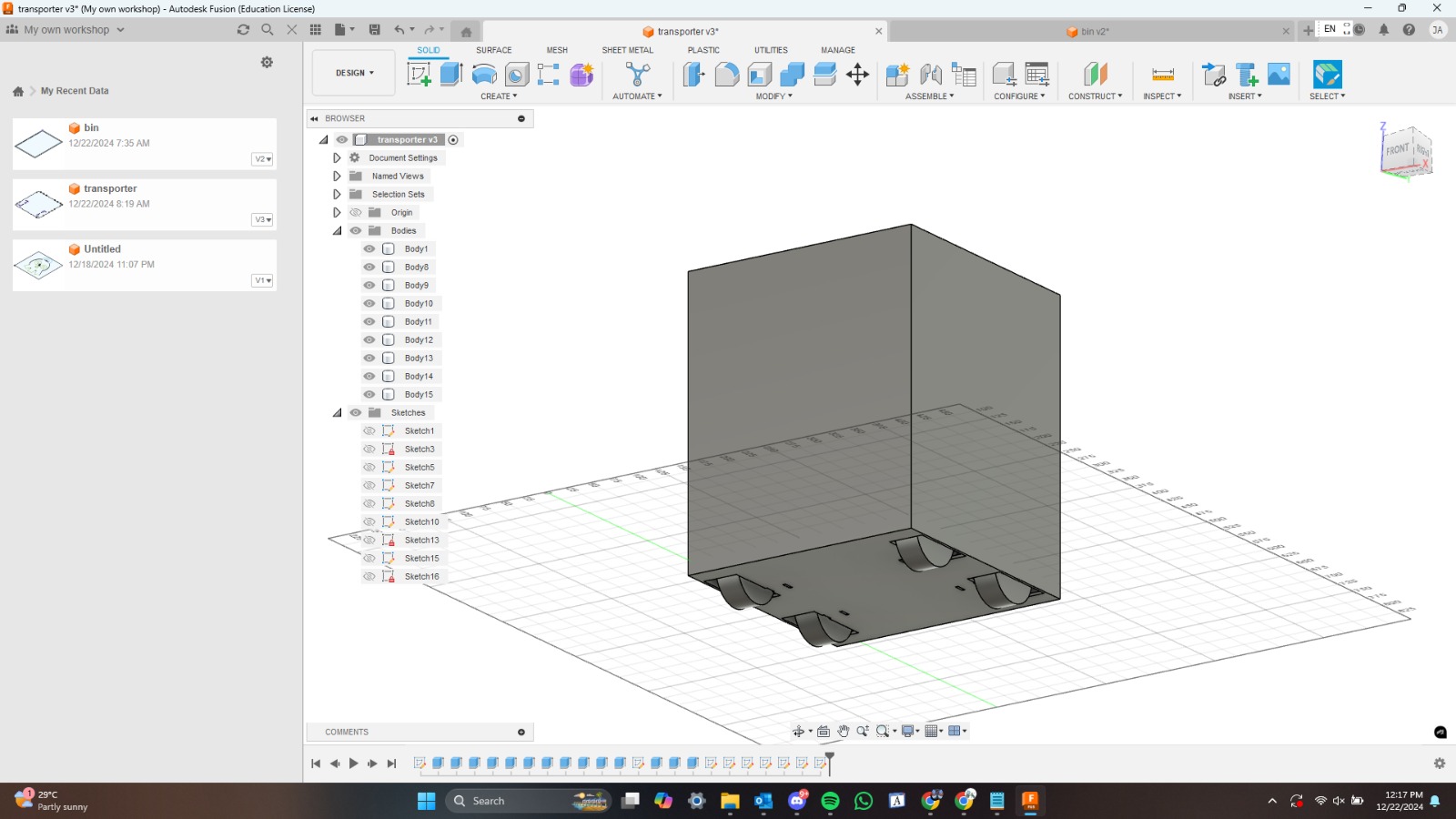
How we built it
we made use of electronic such as relay, motors, esp32 microcontroller, and more. We also use Fusion360 to design the robot and the bin.
Challenges we ran into
The esp32 does not supply enough voltage for the relay to work. We also did not have enough time to complete it. We took too long brainstorming for an idea.
Accomplishments that we're proud of
We were proud that we were able to produce at least a product that is decent enough within the time given
What we learned
We learnt to be more decisive and more prepared going into the competition
What's next for Garbage Go
We are going to continue and test out the circuit to see and better improve it.
Built With
- audino
- autodesk-fusion-360
- esp

Log in or sign up for Devpost to join the conversation.