-
-
fixing a servo
-
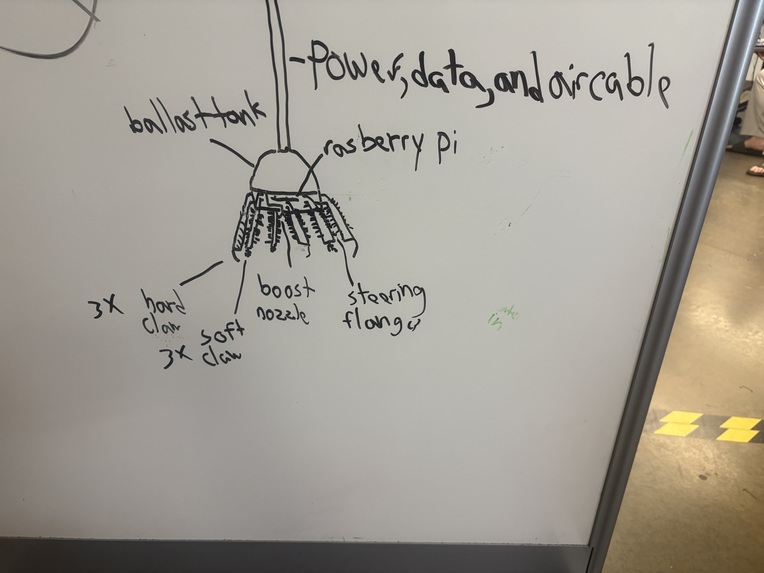
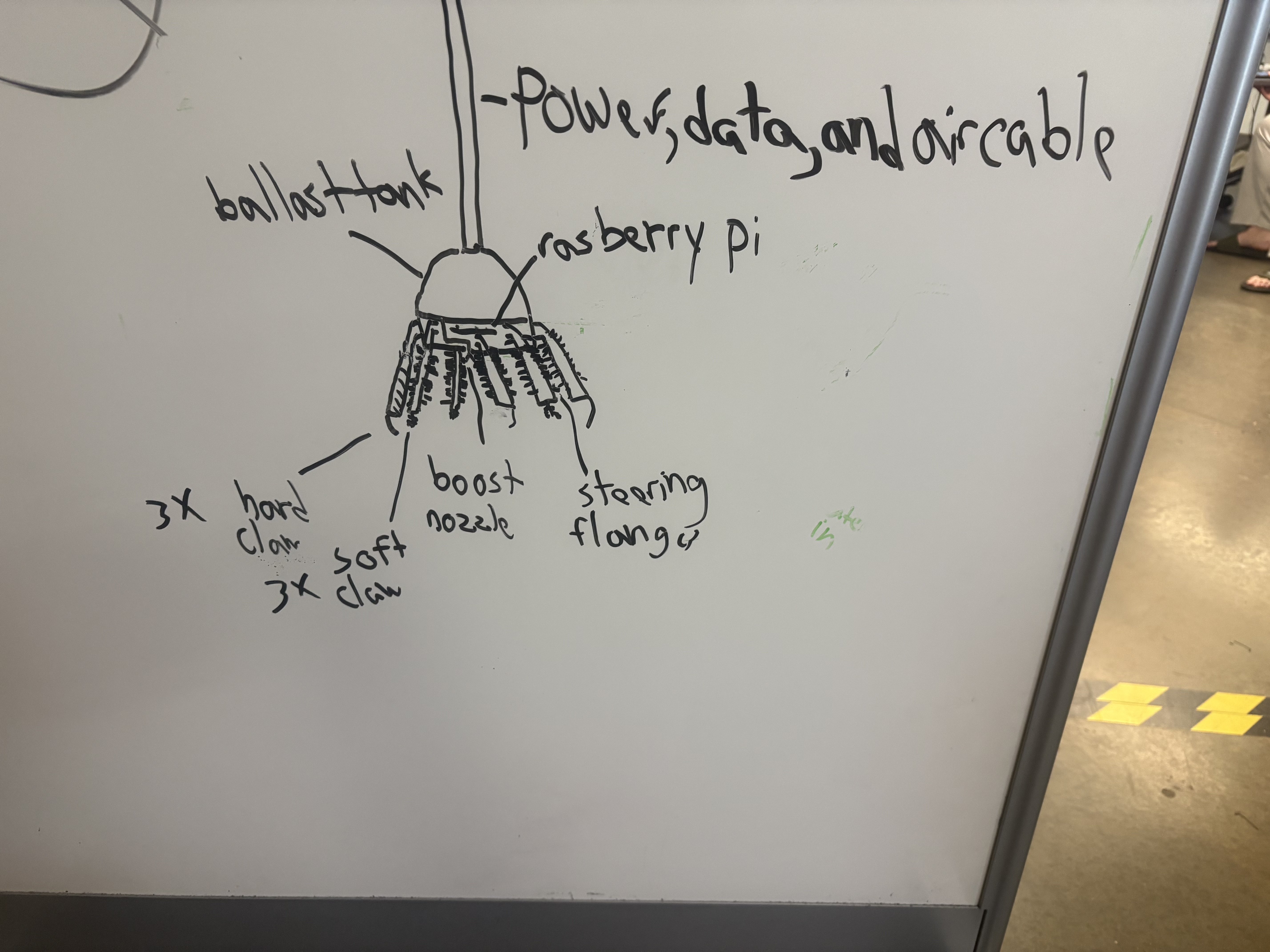
diagram
-
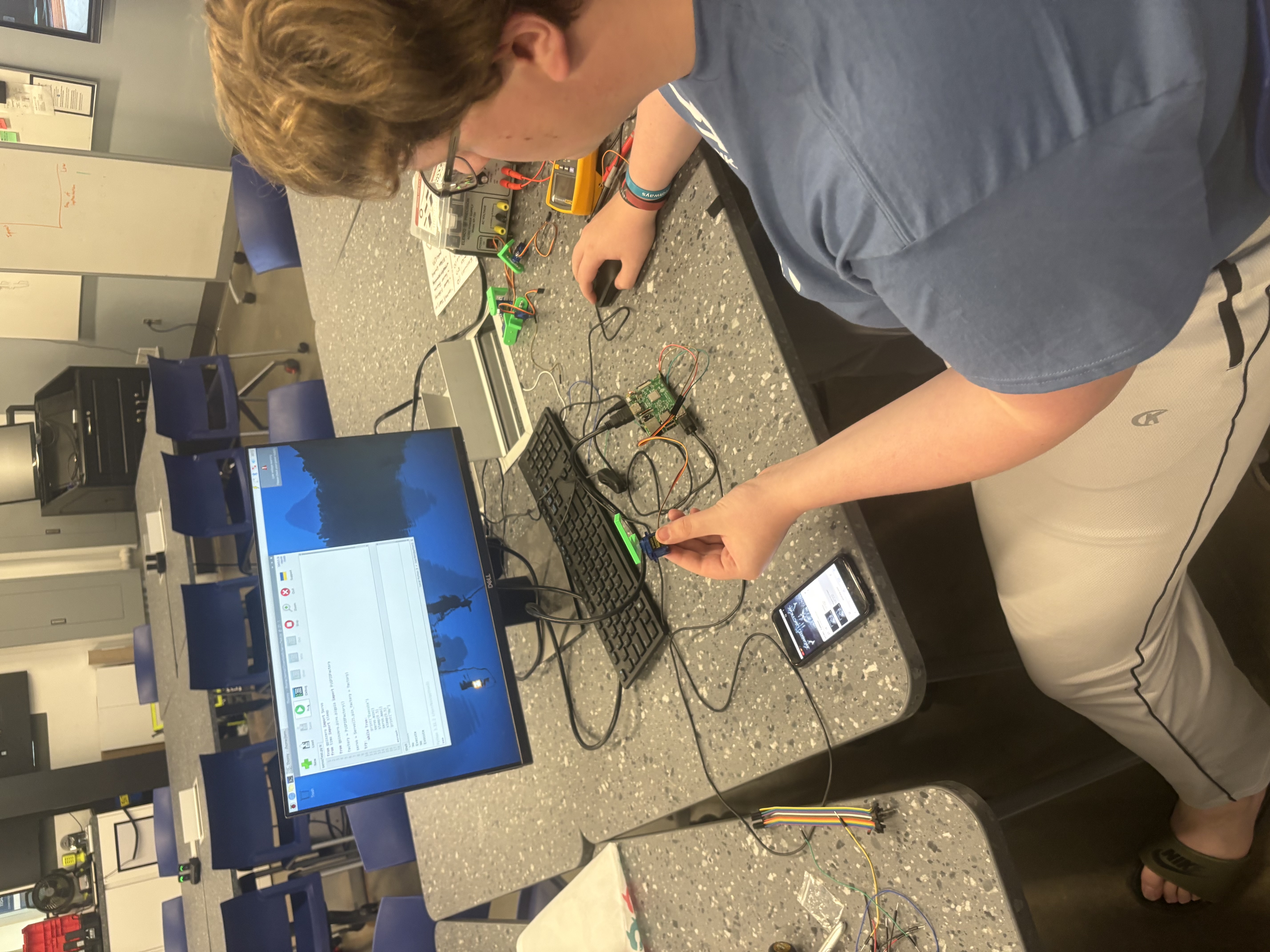
coding
-

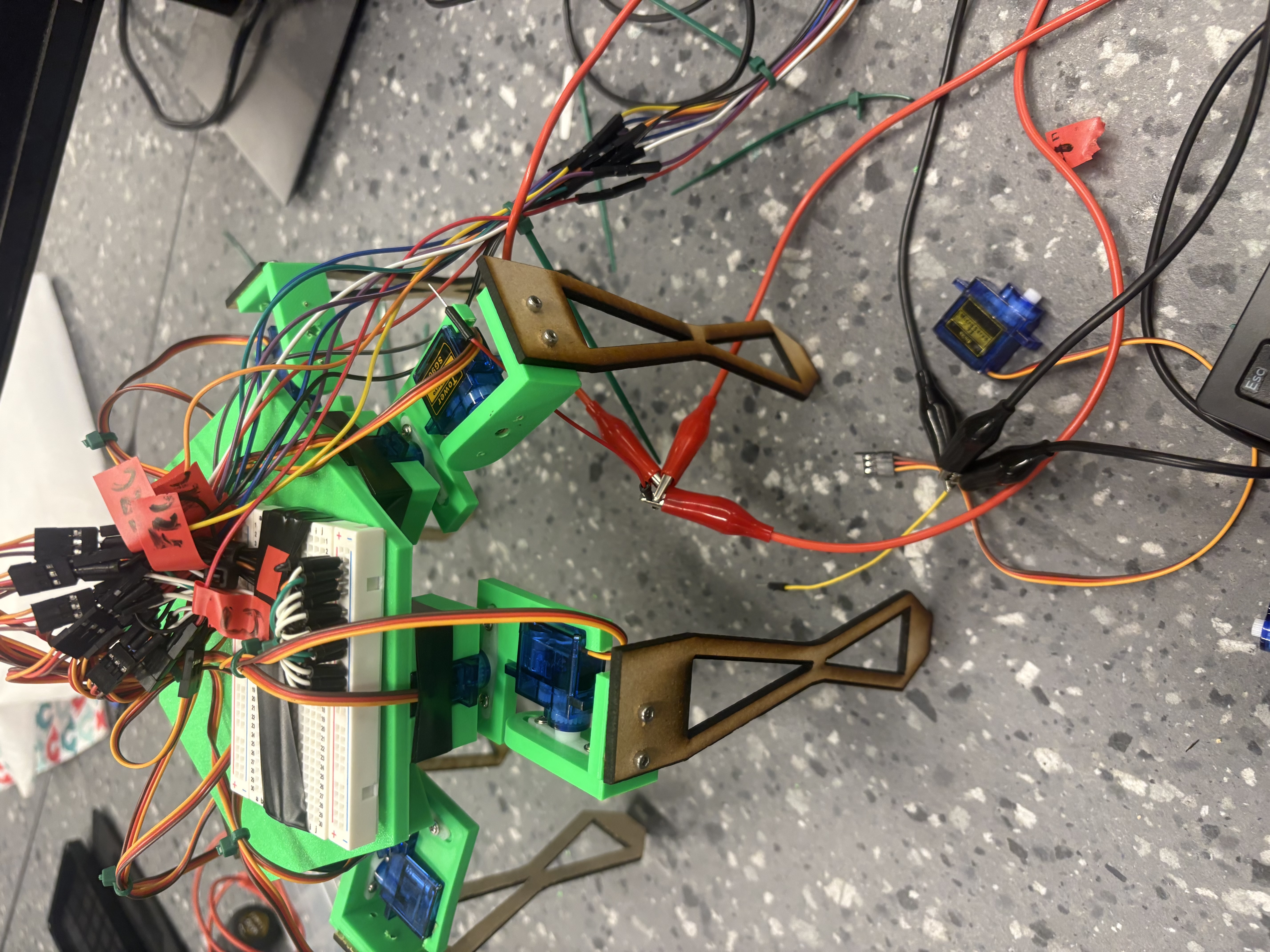
assembly
-
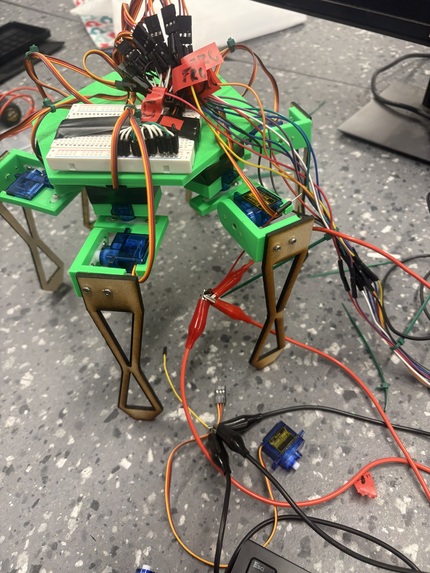
standing robot

Inspiration
''' after brainstorming to find a simpler, more agile option for complex sample retrieval we took inspiration from the form of a starfish '''
What it does
''' the G.R.A.P.P.L.E.R system is intended for semiautonomous and manual guidance to observe and retrieve samples in complex maritime environments. in order to accomplish this it is able to use a variety of movement options including dynamic weight reduction, neural net powered climbing and transversal pathfinding, and direct thrust from the air line '''
How we built it
''' the current prototype of G.R.A.P.P.L.E.R utilizes a 3d printed chassis and laser cut legs, these where designed in Onshape and allowed us to rapidly iterate on prototypes with a digital twin philosophy. after initial fabrication we utilized Fablab tools to post process and alter the system for full assembly code was done utilizing a virtual python environment in PiOS '''
Challenges we ran into
''' in our rush to check out Saturday night we found outselfs locked out of the Fablab with all of our stuff in side, this directly set us back around 2 hours and indirectly much more as we found that we did not have all of the equipment we needed later that night after we got it unlocked. in addition to this our 3D printed parts did not have several features that where needed for full assembly, but with some creativity we where able to coax the parts into assembly. We where primarily held back by software hurdles as it took several hours of debugging to get our servos communicating and then up until nearly the deadline to get the servos to move if improperly. '''
Accomplishments that we're proud of
''' we are very proud to have been able to design, iterate, and creatively assemble a mechanically and electrically functional hexapod in just 36 hours, in addition to this we had quite a few fun experiences solving everything from holes that we forgot to extrude to a lockout. '''
What we learned
''' we have greatly improved out rapid prototyping skills and collected valuable experience on PiOS for the use in future projects or the continuation of this one. our wiring abilities where put to the test during this '''
What's next for G.R.A.P.P.L.E.R
''' we plan on continuing to work on the prototype until it is able to walk given how close we where before the deadline and the accessibility of the parts. this is made especially enticing since it mechanically and electrically was fully functional '''


Log in or sign up for Devpost to join the conversation.