
What it does
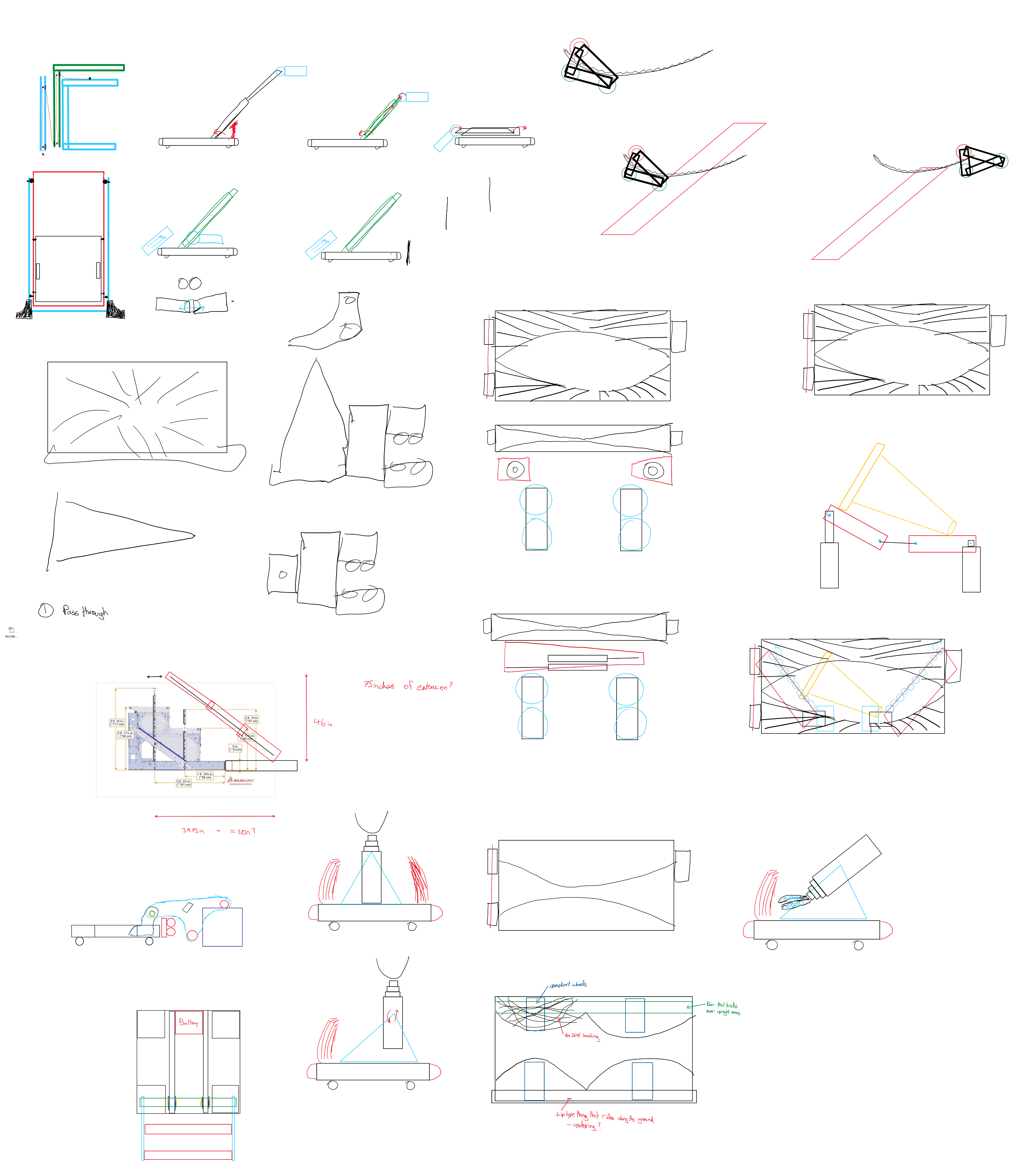
This robot is designed to pick up cones and inflatable cubes and place them on pegs. As the lead programmer, my main goal was to automate this process to make the scoring sequence as fast as possible. One example of this is the vision software I wrote that would use on-field fiducial markers fused with wheel odometry to maintain a global pose of the robot. To control the robot's mechanisms, I used a mix of feedforward and feedback control as well as state management to enable fine control of mechanisms and prevent collisions.

Log in or sign up for Devpost to join the conversation.