-

pilot unknown
-
3 node FlyBye
-
3 node FlyBye

Inspiration
RC racing has been popular for some time, but the traditional use of transponders causes performance issues in the relatively new sport, FPV drone racing. Transponders can be somewhat cumbersome to mount, and not to mention penalizes the weight of the drone. If only there was a way to track drones without adding transponders...
What It Does
FlyBye looks for vast changes in particular frequencies that are broadcasted by the video transmitters from the FPV cameras used on the drones. Since these cameras are already required systems for the drone, the extra weight of a transponder can be removed. When a drone races by, the strength of the received video signal momentarily peaks. Once the strength goes below a certain threshold value, the drone's lap time is recorded. The current configuration allows for up to three drones to be tracked in real time, but this project is scaleable to keep track of up to eight racers! For visual ease of use, the system communicates with the popular racing software LiveTime, making testing and setting up races a breeze.
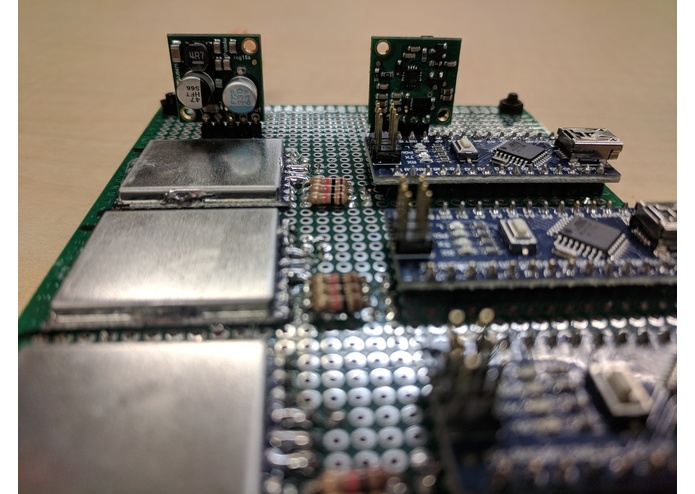
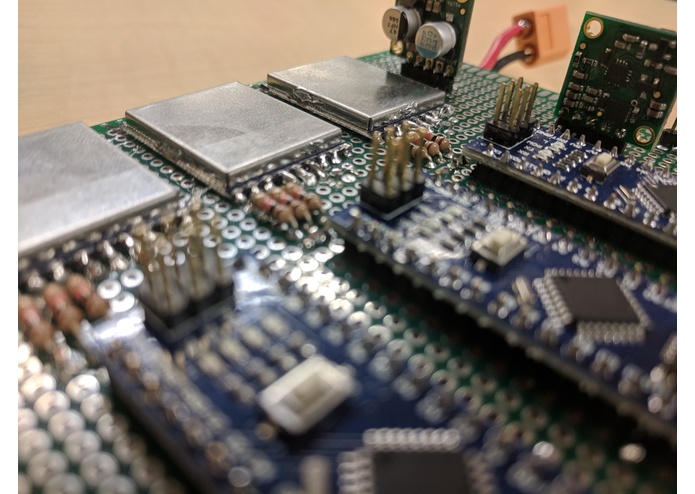
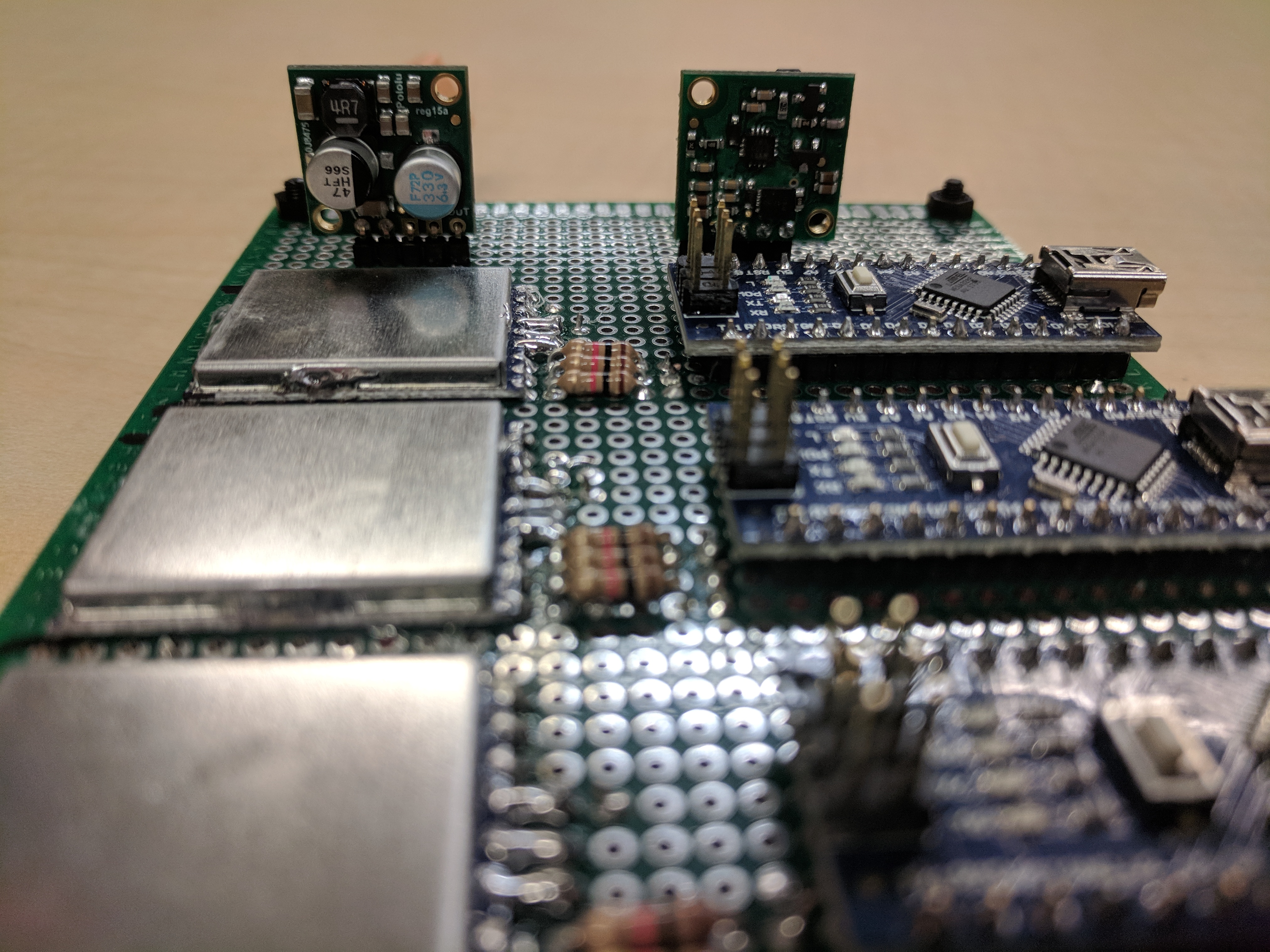
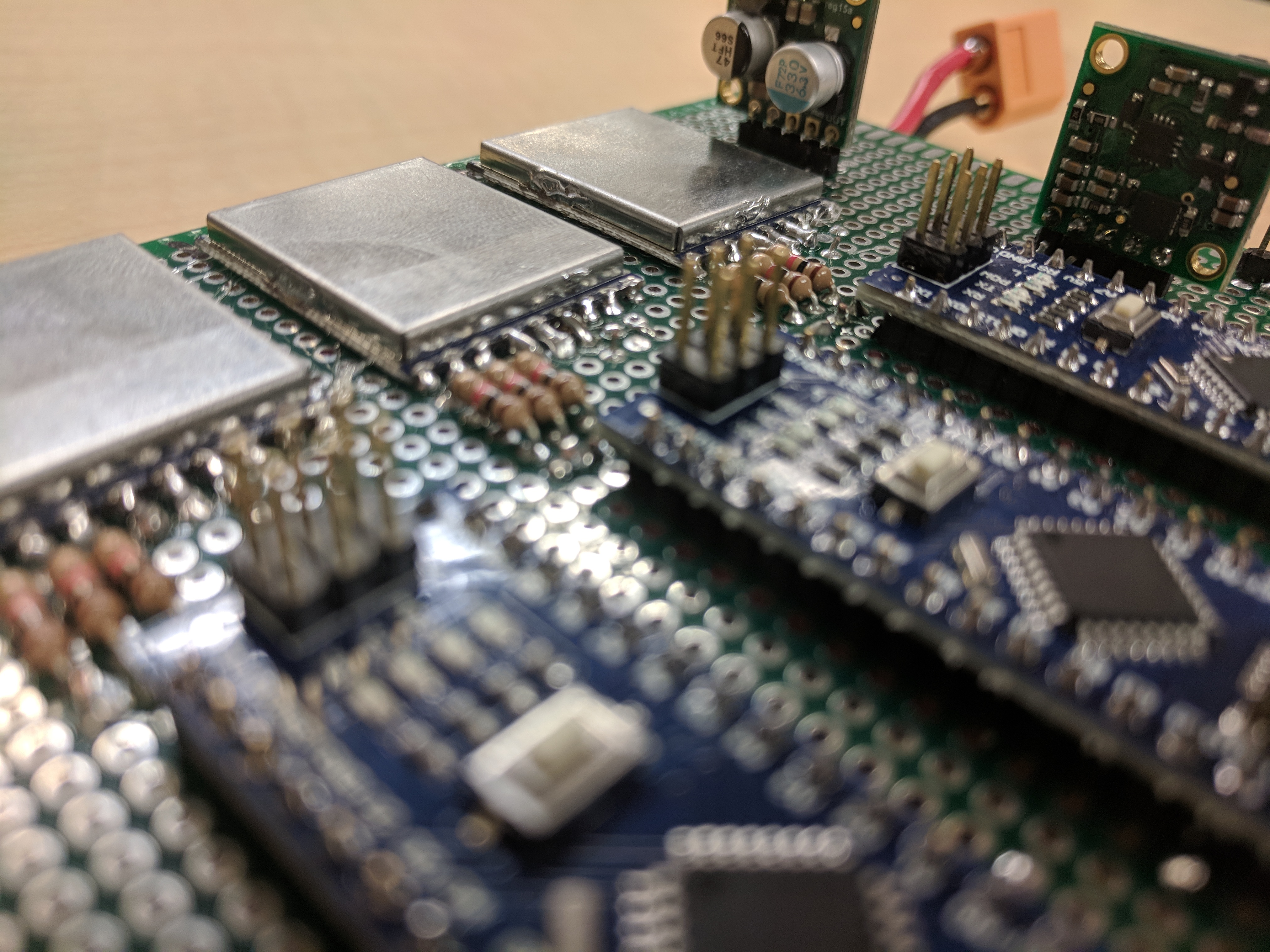
How We Built It
One of the highlights of the solution is the fact that it is very modular. Due to this modularity, it makes modifying, and upgrading this project relatively straightforward. We decided to start simple and only install three nodes. A node is comprised of an Arduino nano and a RX5808 video receiver module. Each RX5808 module communicates with its Arduino via SPI, then the data from each sensor is sent through the Arduinos via i2c on a common data line to the Raspberry Pi. We then set up a DHCP server on the computer to obtain a static IP address so that the Raspberry Pi could be directly connected to a computer via Ethernet without using a router. Using putty, we then SSHed into the pi to run a script which launches the tracker program.
Challenges we ran into
We originally had the board set up with four nodes, and the Arduinos were powered from the battery. Unfortunately, while testing, a short between Vin and GND with a multimeter probe resulted in the destruction of the selector diodes on all of the the Arduinos. After the incident, one of the arduinos was desoldered from the board to check out the damage. From this, we were able to isolate the problem to a single diode. This diode was determined not to be mission critical, and we were able to find the work around which was to power the Arduinos using the micro USB ports (oops).
What's next for FlyBye
The future for the FlyBye looks bright. The new design will be constructed using a PCB, fully enclosed, as well as all modules powered off of a single 4s LiPo battery, with improved power protection. A touch screen for the Raspberry Pi may also be added, as well as a Raspberry Pi program to remove the PC component of the system, making it a standalone solution. The race information would then be accessible via the Raspberry Pi uploading data to a website via WiFi.
Built With
- arduino
- pololu-3.3-volt-regulator
- pololu-5-volt-regulator
- polulo
- raspberry-pi
- rx5808
- various-resistors
Log in or sign up for Devpost to join the conversation.