-

Targeting screen
-

Targeting screen
-

Targeting screen

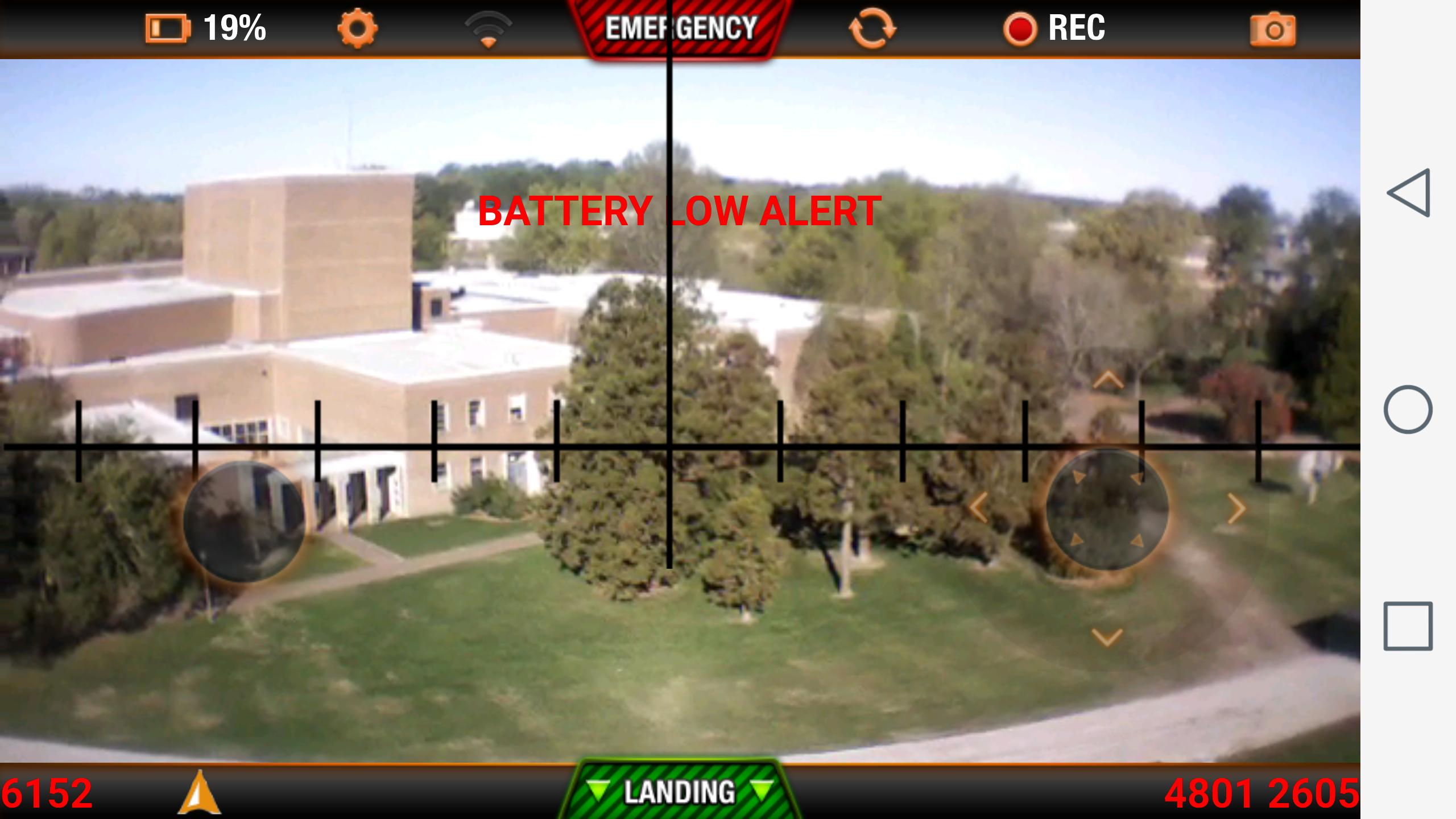

Problem: Forward observation for artillery is a critical, but very dangerous task. Use of a drone allows forward observers to call for artillery fire without exposing themselves. In order for a drone to be useful for forward observation, soldiers will require that it have a Milliradian reticle, and the ability to measure an azimuth in Milliriadians. The ability to display location using the Military Grid Reference System would also be convenient, but is not necessary because observers will already be equipped with a GPS. The drone must also be intuitive to use.
Current state of implementation:
- Ease of use: ForwardParrot is a modification of AR FreeFlight 2.0, retaining the ease-of-use of a recreational App.
- Milliradian reticle: Fully implemented.
- Azimuth Measurement: Azimuth conversion, display, calibration are fully implemented. Azimuth readings are currently calculated from gyroscope readings on the controlling device. The next stage of development is to draw these gyroscope readings from the drone's navdata.
- Military Grid Reference System: Conversion and display are implemented, but a full implementation will require GPS data from AR's FlightRecorder hardware, which is purchased seperately.
Business Plan: The end goal is not to sell the software itself, but to use the software to open up civilian drones to the military market. Advantages to military customers are decreased cost, weight, and training requirements compared to purpose-built military drones. The Ardrone 2.0 is a very low-cost solution, but it is limited in terms of camera resolution, endurance, and wind stability. This business plan can also easily be applied to more powerful drones such as the Draganflyer. These drones are more powerful than the AR Drone and can be sold for a much higher price, while still remaining significantly cheaper than purpose-built military drones.
Lessons Learned:
- The AR Drone SDK 2.0 has not been updated since 2012, and is not easily compatible with current tools such as Android Studio and Gradle. Simply building the project was a significant challenge that improved the team's understanding of Gradle.
- The team learned to use threading to update and display real-time data, asynchronously from the camera feed and flight controls.
- The team learned to work with C libraries embedded in an Android project.
- The team became more familiar with all aspects of creating a real-time UI for Andriod.
- Became familiar with open source software and how to modify it
Built With
- android
- android-studio
- ar-drone-2.0
- ar.drone

Log in or sign up for Devpost to join the conversation.