
Inspiration
We are passionate about cars and we want to create and fun and intuitive user controlled car.
What it does
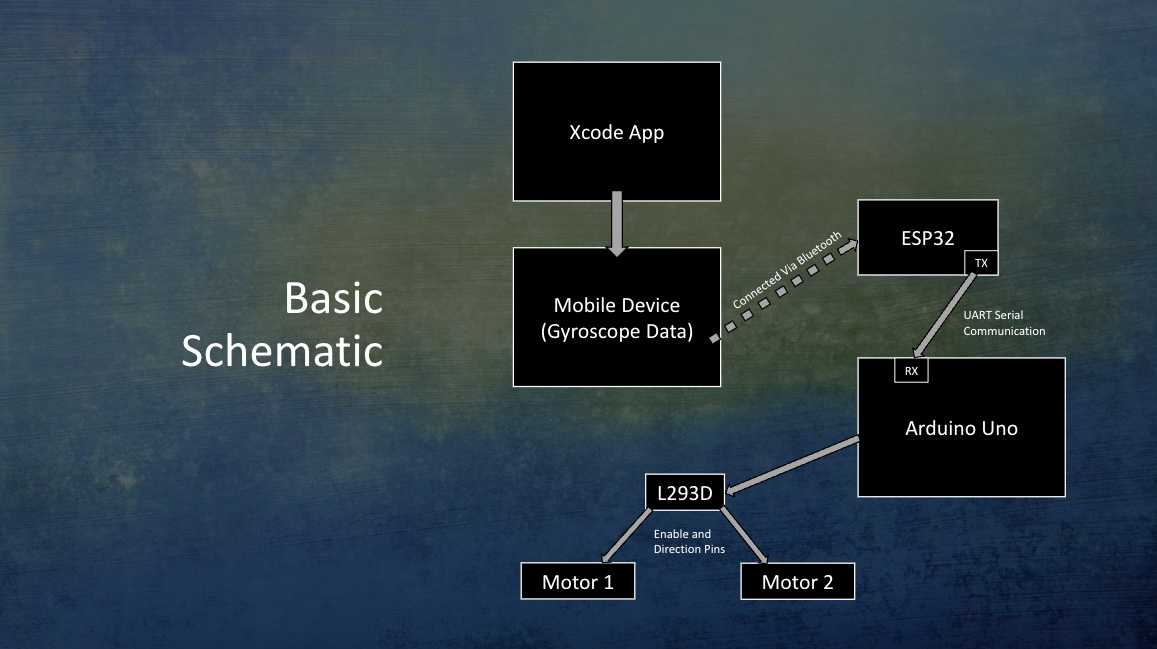
This car is controlled via gyroscope data provided by a mobile device. When the phone is tilted forward, the car moves forward, when the phone is tilted to the right, the car turns to the right. Similar actions are performed when the phone is tilted back and to the left.
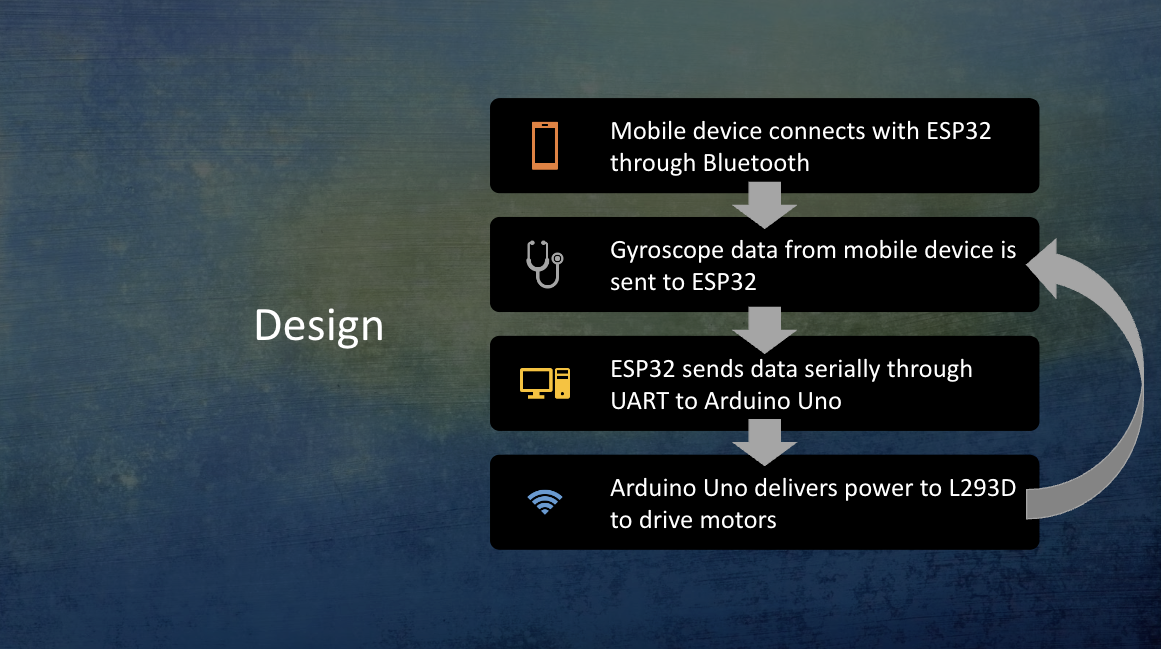
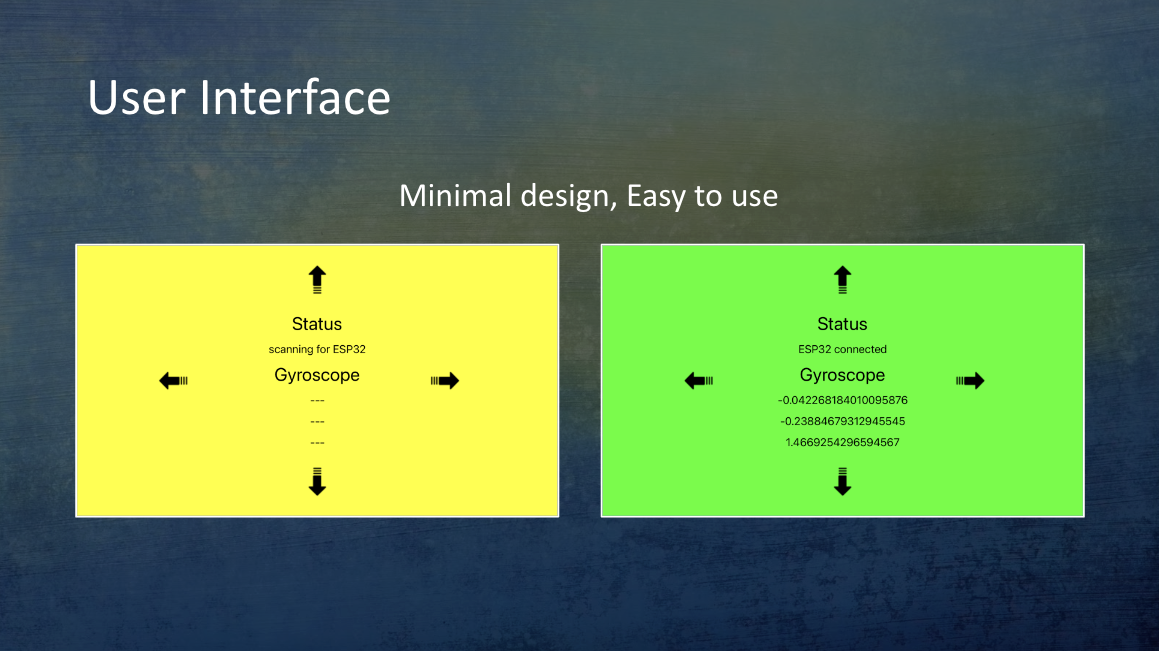
How we built it
The gyroscope data is obtained using a custom built app, make on XCode. Using the Core Motion library, the gyroscope data was gathered from the phone in real time and then sent to the ESP32 though a broadcasting bluetooth server. The ESP32 then uses serial communication, UART, to send the data from the ESP32 to the Arduino. The Arduino then uses threshold values to move the car. The car moves through two dc electric motors, an L293D chip, and an Arduino. The L293D chip is a motor driver and the Arduino controls the speed of the motor.
Challenges we ran into
The serial communicate was our main challenge. We had to learn how UART worked and how to communicate between two different chips.
Accomplishments that we're proud of
We are proud of creating a custom app that communicates with the ESP32 and is able to send data through a bluetooth broadcasting server.
What we learned
We learned about serial communication and how to use XCode.
What's next for Bluetooth Gyroscope Car
Our next steps are to reduce the delay between tilting the phone and seeing the car actually move. Also, we plan on reducing the number of visible wires and creating a more aesthetic chassis for the car.

Log in or sign up for Devpost to join the conversation.