-
-

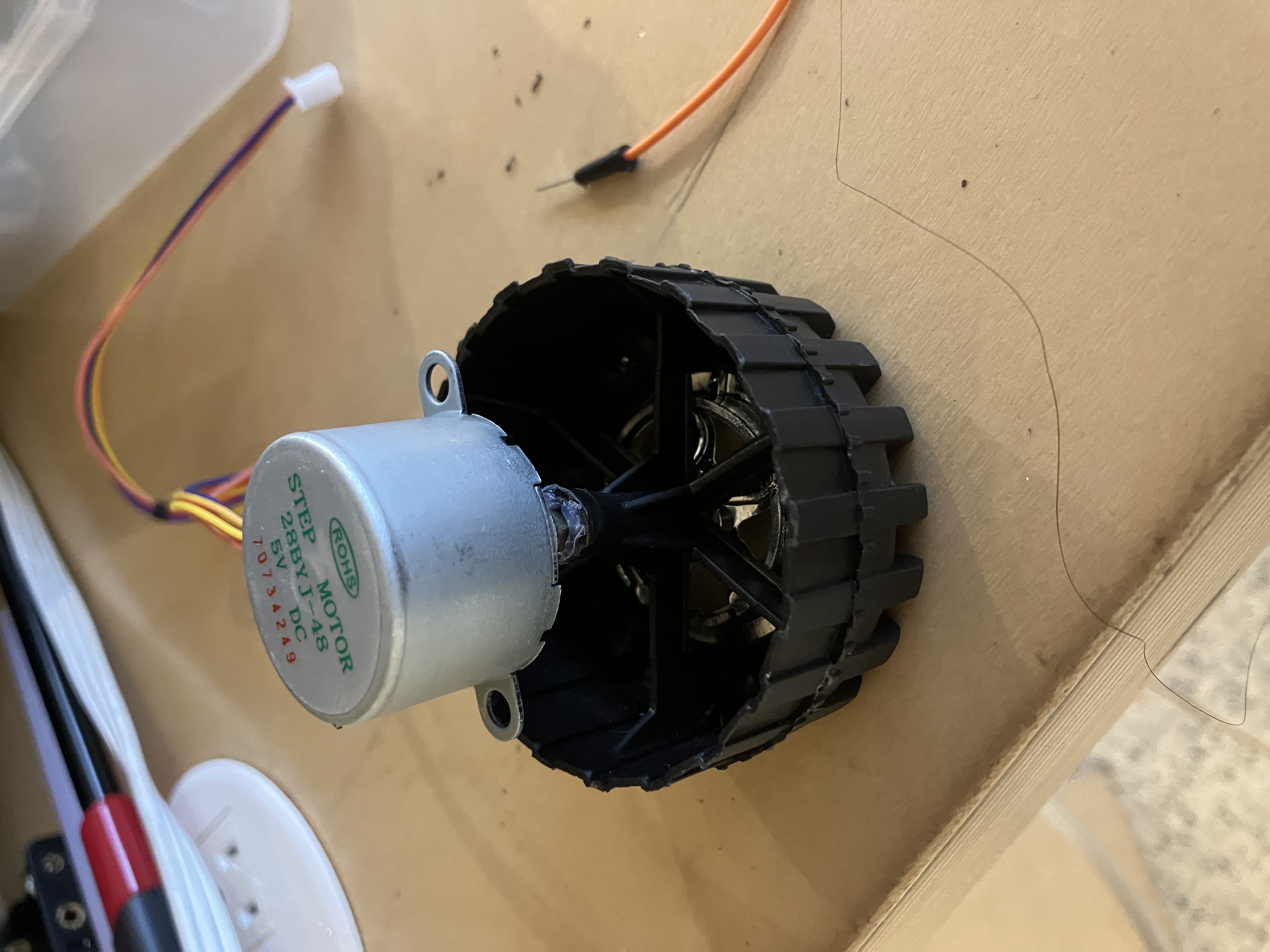
Wheel
-
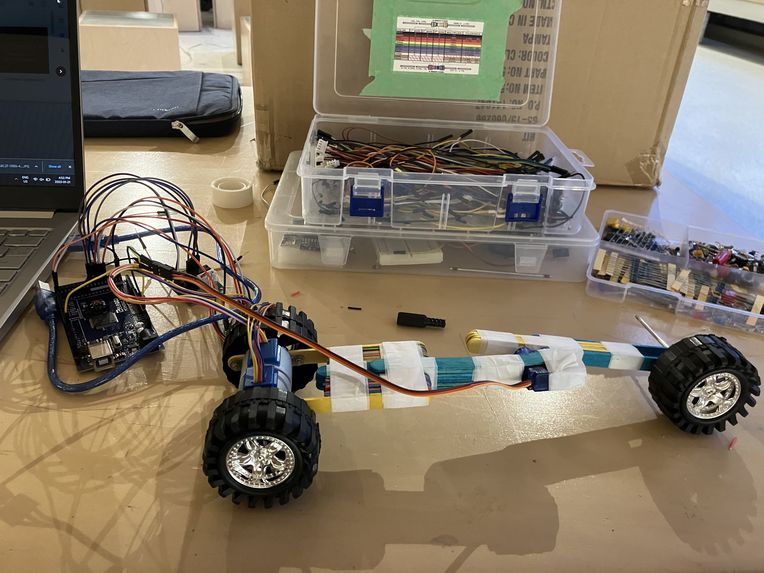
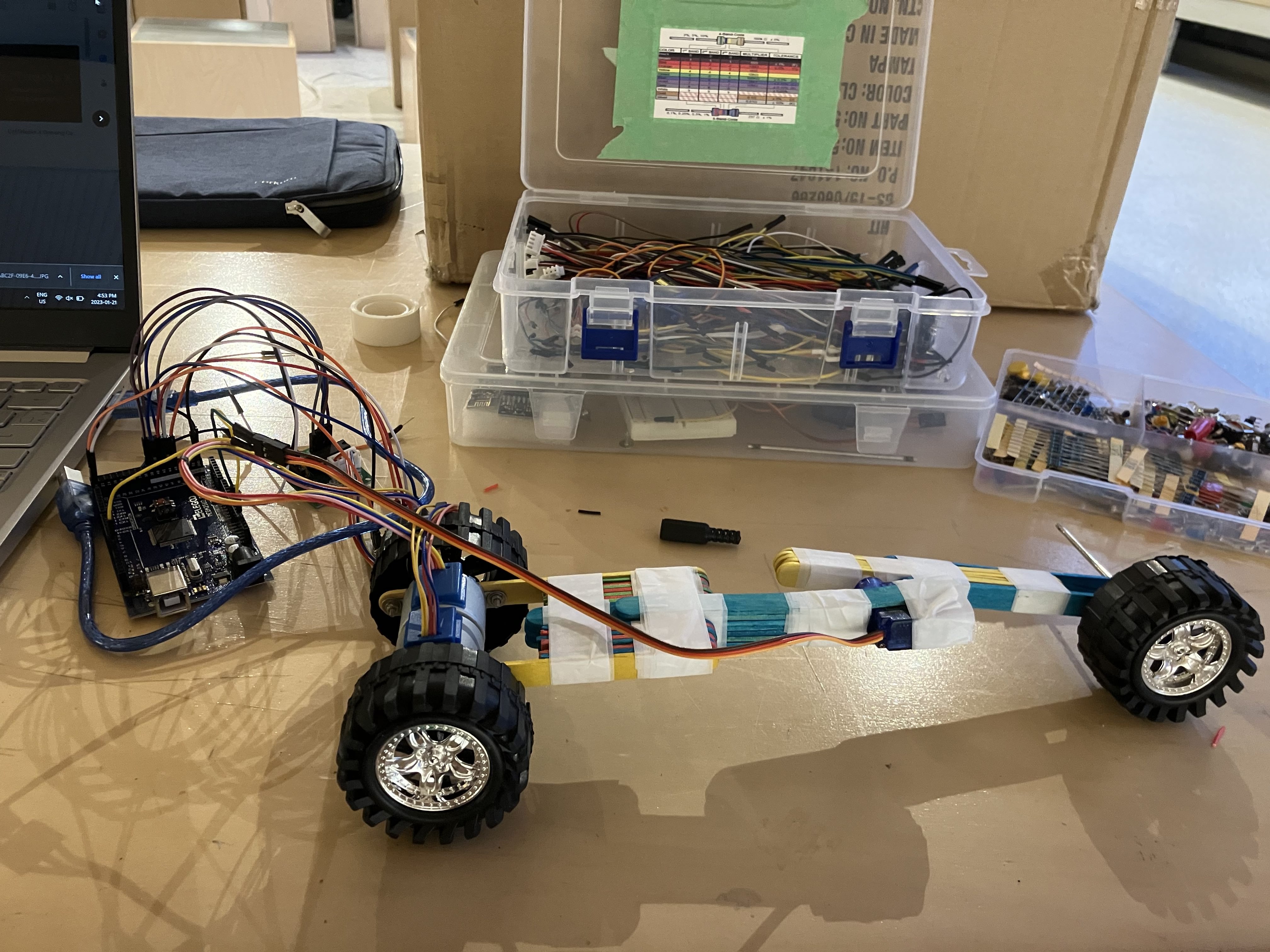
Completed Base
-
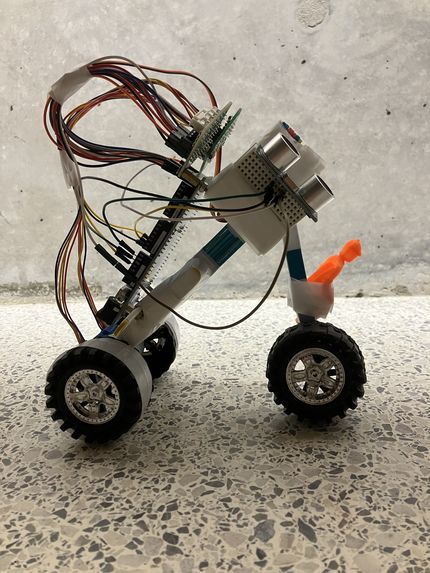
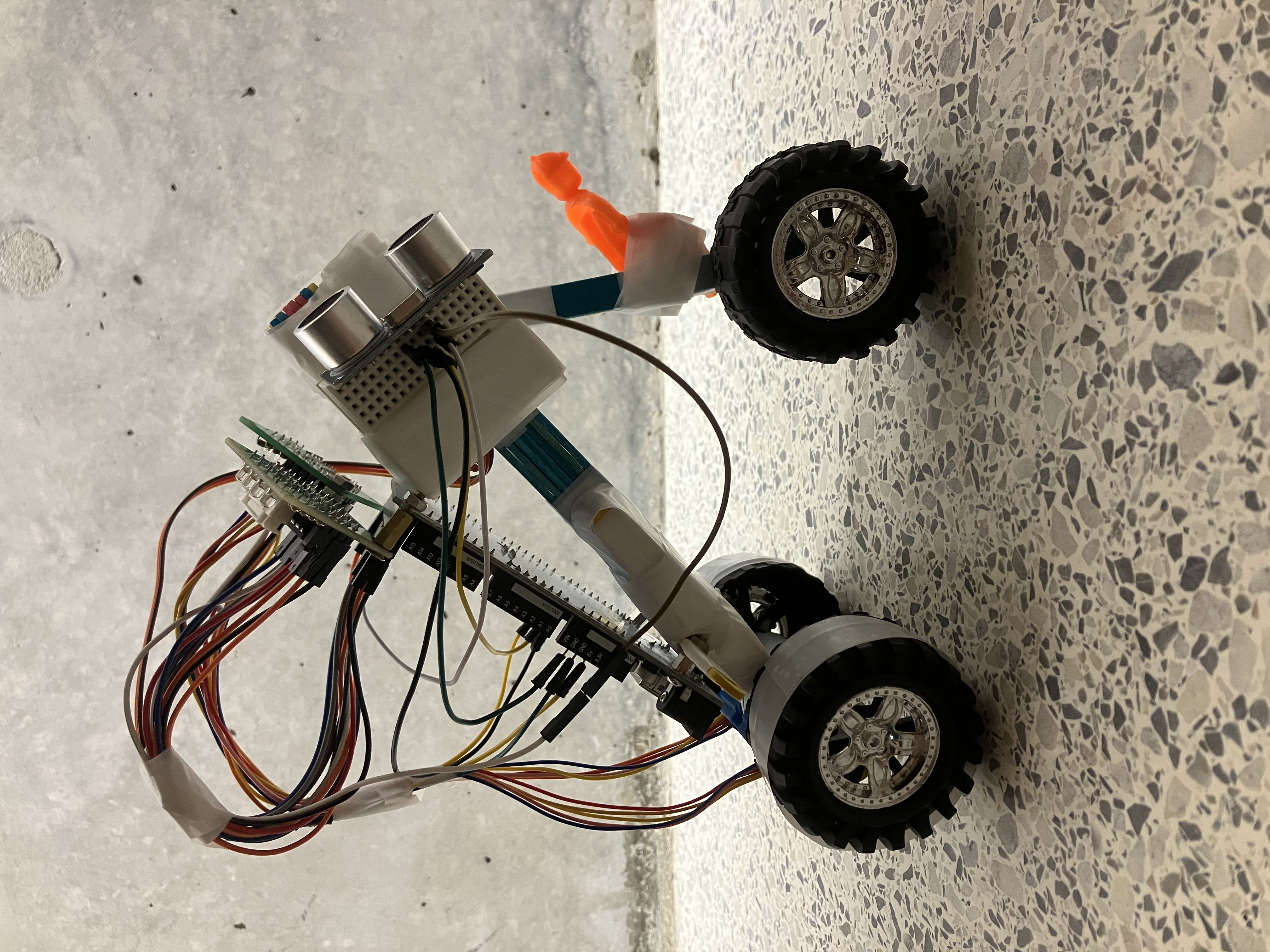
Completed Robot
-
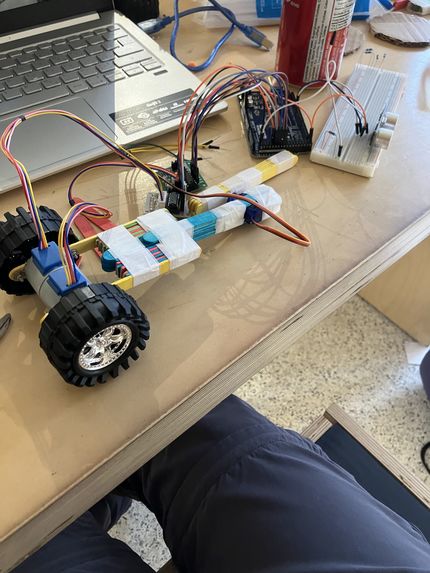
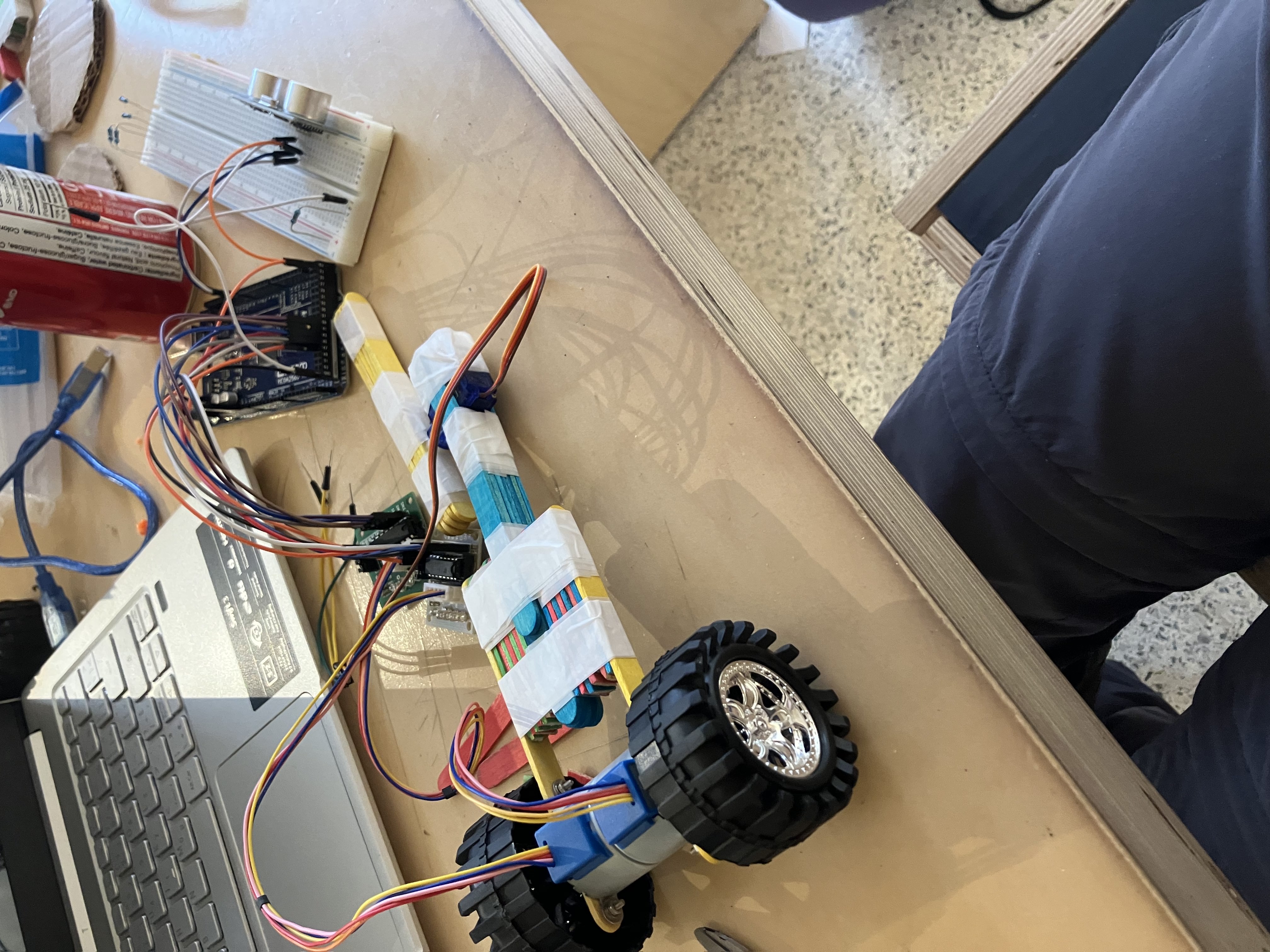
Base in Progress
Summary
Fold-N-Explore is an innovative and efficient exploratory robot that automatically folds when it detects an object in front of it. This unique feature can navigate tight spaces and areas that would otherwise be inaccessible to traditional robots. Its compact design also makes it easy to transport and deploy, making it perfect for various applications such as search and rescue, archaeology, and space exploration. With Fold-N-Explore, you can explore the unknown with ease and efficiency.
How I built it
I built this robot with popsicle sticks, a toy truck, scotch tape, and Arduino parts. The structure's base is constructed from taped-together popsicle sticks taped to other popsicle sticks and components. A few of the components are joined together with screws. The holes for these screws were made using a screwdriver.
The program was coded in the Arduino IDE with assistance from a few external sources (https://www.norwegiancreations.com/2017/12/arduino-tutorial-serial-inputs/, https://howtomechatronics.com/tutorials/arduino/ultrasonic-sensor-hc-sr04/, https://roboticsbackend.com/arduino-ir-remote-controller-tutorial-setup-and-map-buttons/ and https://www.tutorialspoint.com/arduino/arduino_stepper_motor.htm)
Challenges
One of the main challenges was getting the two stepper motors to run simultaneously. This was solved by having them not run simultaneously but rather by using small steps and having them alternate every step, allowing it to appear as though they are simultaneous.
Accomplishments
Completing the robot with limited materials, time and manpower, my greatest accomplishment was completing the robot.
What's next for Fold-N-Explore
A future iteration for this project would include a 3D printed case, allowing the robot to be more robust and consistent with more precisely built components. Additionally, a future expansion would be the addition of an arm. This was not possible within the time period due to power distribution issues.

Log in or sign up for Devpost to join the conversation.