Inspiration
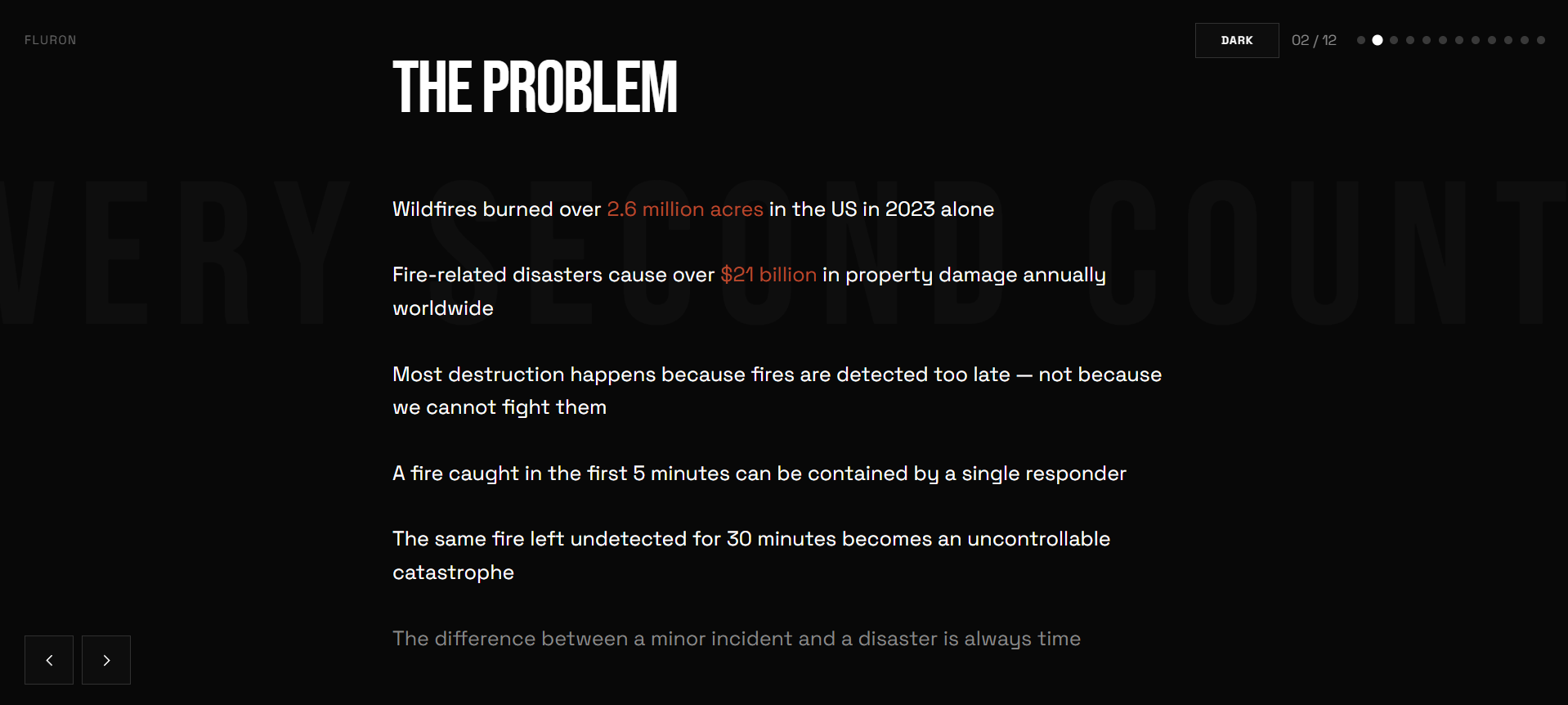
In 2023 alone, wildfires burned over 2.6 million acres across the United States. Globally, fire-related disasters cause an estimated \$21 billion in property damage annually, claim tens of thousands of lives, displace entire communities, and devastate ecosystems that take decades to recover. In countries like India, Australia, Brazil, and across Southern Europe, wildfire seasons are growing longer and more destructive every single year due to climate change.
But here is what struck us the most — the overwhelming majority of this destruction is not because we lack the ability to fight fires. It is because fires are detected too late.
A wildfire that is caught in its first 5 minutes can often be contained by a single responder with basic equipment. That same fire, left undetected for 30 minutes, can grow into an uncontrollable blaze requiring hundreds of firefighters, aircraft, and millions of dollars to manage. The difference between a minor incident and a catastrophe is almost always time.
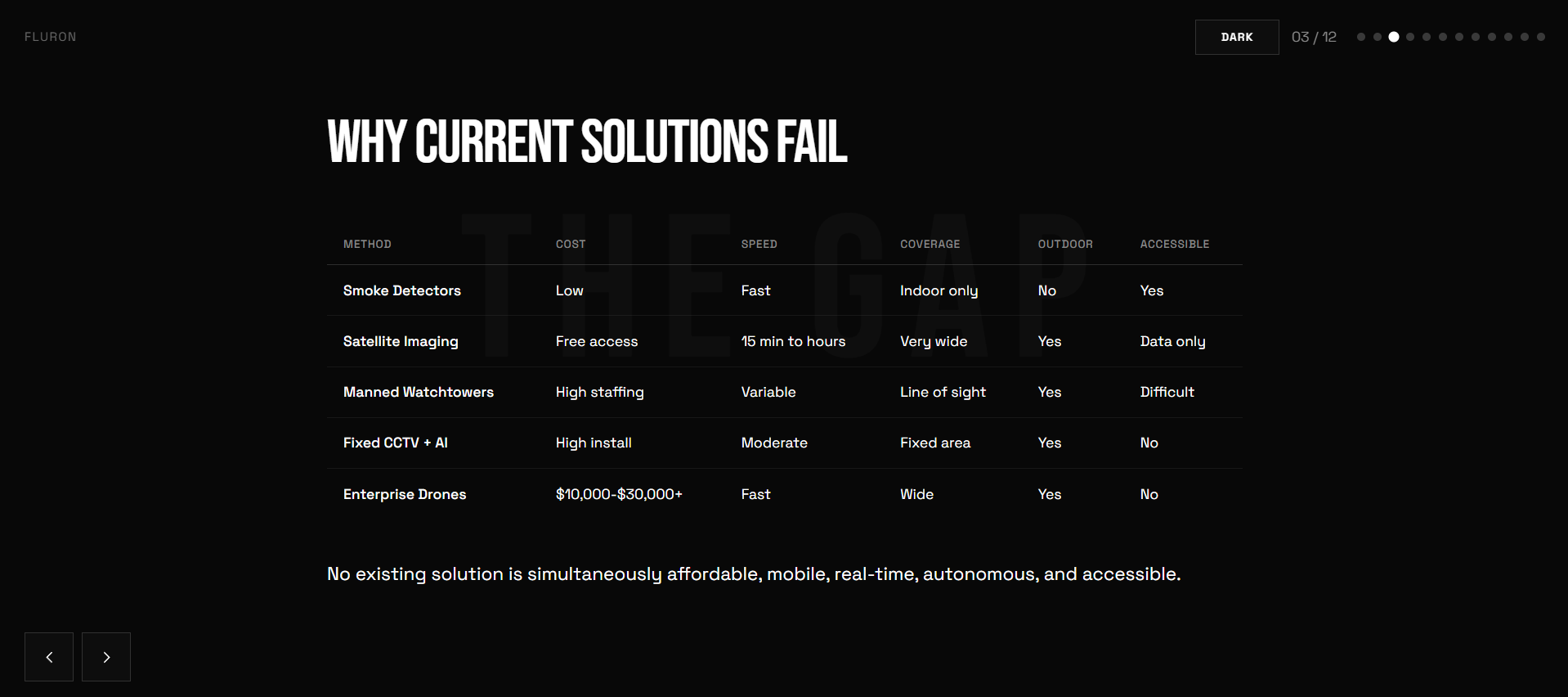
We started researching how fires are currently detected and found a deeply frustrating reality:
- Smoke detectors only work indoors and only alert people already inside the building. They do nothing for forests, open warehouses, agricultural land, or industrial yards.
- Satellite-based detection systems like NASA's FIRMS have wide coverage but operate with delays ranging from 15 minutes to several hours. By the time a satellite flags a hotspot, the fire has already spread significantly.
- Manned watchtowers and human patrols are labor-intensive, limited in coverage, and dependent on visibility conditions. A single human cannot monitor thousands of acres continuously.
- Fixed CCTV systems with AI require permanent installation, wiring, power supply, and significant upfront investment. They cannot be redeployed and do not work in remote or shifting environments.
- Thermal imaging drone systems from companies like DJI and Skydio exist but cost \$10,000 to \$30,000+ per unit, putting them completely out of reach for small municipalities, rural communities, developing nations, and small business owners.
The gap became painfully obvious. There is no solution that is simultaneously affordable, mobile, real-time, autonomous, and accessible for the communities that are most vulnerable to fire.
We asked ourselves one question:
What if a drone could spot a fire the moment it starts, understand the severity of the situation, and alert responders with precise information — all without costing tens of thousands of dollars?
That question became Fluron.
What It Does
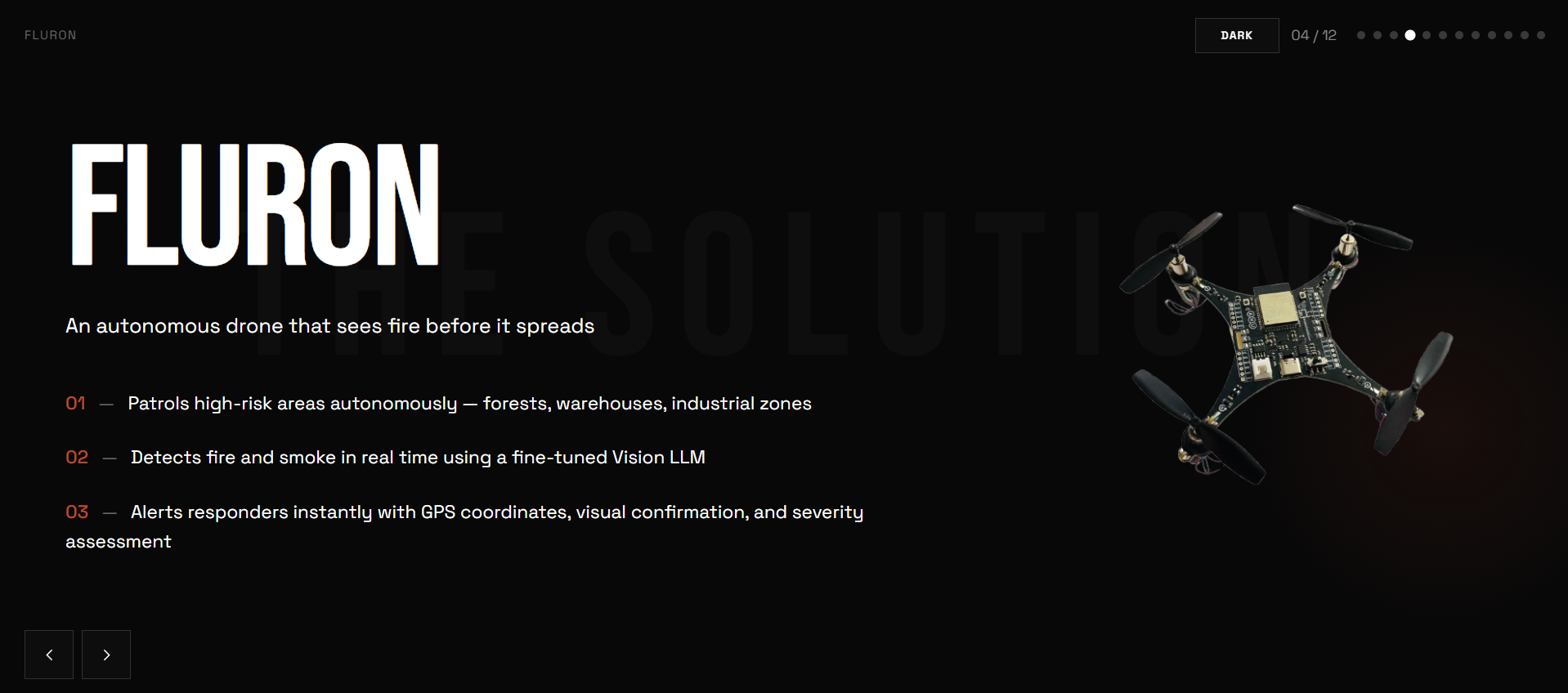
Fluron is an autonomous drone-based fire detection system that patrols high-risk areas and uses a fine-tuned Vision Large Language Model to detect fire and smoke in real time, assess the situation contextually, and alert responders with actionable information.
Unlike traditional detection systems that simply trigger a binary alarm, Fluron is designed to understand what it sees. It does not just say "fire detected." It provides contextual analysis — where the fire is, how severe it appears, what is nearby, and how urgently responders need to act.
Core Capabilities
| Capability | Description |
|---|---|
| Real-Time Fire and Smoke Detection | Fine-tuned Vision LLM continuously analyzes the live video feed from the drone's camera to identify fire and smoke patterns with high accuracy, even in challenging lighting and weather conditions |
| Fully Autonomous Patrol | The drone follows predefined patrol routes over high-risk zones without requiring manual piloting, enabling continuous monitoring with minimal human involvement |
| GPS-Tagged Incident Alerts | When fire or smoke is detected, the system immediately sends an alert to designated responders with the exact GPS coordinates, a snapshot of the scene, and a severity assessment |
| Contextual Scene Understanding | Unlike basic object detection models that output a bounding box and a label, our Vision LLM analyzes the full scene — identifying what is burning, what is nearby, how the fire appears to be spreading, and the estimated severity level |
| Affordable and Accessible Design | Built with cost-conscious hardware choices to ensure that the system can be deployed by communities, small businesses, and organizations that cannot afford enterprise-grade fire monitoring equipment |
| Planned CO2 Suppression Module | A future phase of the project will integrate a lightweight CO2 cartridge release system that can suppress small fires at the earliest stage, buying critical time before human responders arrive |
How We Built It
Phase 1 — Deep Research into the Problem
Before writing a single line of code or purchasing a single component, we spent significant time understanding the fire detection landscape in depth. We studied existing solutions, their strengths, their weaknesses, their cost structures, and most importantly, where they fail the people who need them most.
We compiled our findings into a comparative analysis:
| Detection Method | Approximate Cost | Detection Speed | Coverage Area | Works Outdoors | Mobile/Redeployable | Accessible to Small Communities |
|---|---|---|---|---|---|---|
| Indoor Smoke Detectors | Very Low | Fast (seconds) | Single room only | No | No | Yes |
| Satellite Imaging (e.g. NASA FIRMS) | Free to access but low resolution | 15 minutes to several hours delay | Very wide (continental) | Yes | Not applicable | Data only, no response capability |
| Manned Watchtowers | High (staffing costs) | Depends on human attention | Limited to line of sight | Yes | No | Difficult to staff |
| Fixed CCTV with AI | High (installation and infrastructure) | Moderate (seconds to minutes) | Fixed area only | Yes | No | No, requires permanent infrastructure |
| Enterprise Drone Systems (DJI, Skydio) | \$10,000 to \$30,000+ per unit | Fast | Wide and mobile | Yes | Yes | No, cost prohibitive |
| Fluron (Our System) | Under \$2,000 target | Seconds | Wide and mobile | Yes | Yes | Yes, designed for accessibility |
This research confirmed that the gap we identified was real and significant. No existing solution occupied the intersection of affordable, mobile, real-time, and autonomous.
Phase 2 — System Architecture Design
We designed Fluron as a modular system with clearly defined components, each chosen to balance performance with cost and weight constraints.
| Component | Specific Role in the System | Why We Chose It |
|---|---|---|
| Quadcopter Drone Frame | Provides the aerial platform for patrol and mobility | Quadcopter configuration offers the best balance of stability, payload capacity, and maneuverability for this application |
| Camera Module (ESP32-CAM for prototype) | Captures the live video feed that is analyzed by the AI system | Affordable and lightweight starting point for prototyping, with a clear upgrade path to higher-resolution cameras in later phases |
| Vision LLM (Fine-Tuned) | The core intelligence of the system — analyzes video frames to detect fire and smoke and assess the scene contextually | Provides deeper understanding than traditional object detection models, enabling severity assessment and contextual reporting |
| Flight Controller (Pixhawk or equivalent) | Manages autonomous flight, waypoint navigation, altitude hold, and stabilization | Industry-standard open-source flight controller with extensive community support and proven reliability |
| GPS Module | Provides precise location data for both navigation and incident geo-tagging | Essential for autonomous patrol routes and for sending exact fire coordinates to responders |
| LiPo Battery | Powers the entire system including drone motors, camera, compute, and communication | Selected capacity based on calculated power budget to maximize flight time with our payload |
| Wireless Communication Module | Transmits alerts, video feed, and telemetry data to the ground station or directly to responders | Enables real-time monitoring and immediate alert delivery |
| CO2 Cartridge and Valve System (Planned) | Will release CO2 gas to suppress small fires at the earliest possible stage | Lightweight suppression option for early-stage fire intervention before responders arrive |
Phase 3 — The AI Approach: Why We Chose a Vision LLM
This was one of the most deliberated decisions in our project. The conventional approach to fire detection from a drone would be to use a traditional computer vision object detection model such as YOLO (You Only Look Once). These models are fast, lightweight, and well-proven for basic detection tasks.
However, after extensive research and testing, we chose to build our detection system around a fine-tuned Vision Large Language Model instead. This was not a decision made lightly, and we want to be transparent about the reasoning.
Here is a detailed comparison of the two approaches:
| Factor | Traditional Object Detection (e.g. YOLO) | Our Approach: Fine-Tuned Vision LLM |
|---|---|---|
| Output Type | Bounding box with a class label (e.g. "fire" with 87% confidence) | Full contextual scene description with severity assessment, spatial reasoning, and actionable information |
| Example Output | "Fire detected, confidence 0.87" | "A small ground-level fire has been detected approximately 3 meters from a wooden storage structure. The fire appears to be in its early stage with light smoke. Severity: moderate. Immediate attention recommended to prevent spread to adjacent structures." |
| Generalization to New Environments | Requires retraining or fine-tuning when deployed in significantly different environments | Leverages broad pre-trained visual understanding to generalize across unseen environments with less additional training |
| False Positive Handling | Prone to false positives from sunlight reflections, orange objects, or steam without additional logic | Can reason about context to distinguish actual fire from visually similar non-fire events by understanding the broader scene |
| Severity Assessment | Not inherently capable — requires additional model or rule-based logic | Can assess severity as part of its natural output based on visual cues like flame size, smoke density, and proximity to structures |
| Actionable Reporting | Requires a separate system to translate detection into human-readable reports | Generates natural language reports that can be sent directly to responders without additional processing |
| Computational Cost | Lower — runs on edge devices at high frame rates | Higher — requires more capable hardware or cloud processing, which we address through our hybrid architecture |
We acknowledge that the computational cost of a Vision LLM is higher than a traditional model. This is a real tradeoff. Our approach to managing this involves a hybrid processing architecture where lightweight pre-processing happens on the drone's edge hardware to identify candidate frames of interest, and the Vision LLM performs deep analysis on those candidate frames either on a more capable onboard compute module or via a low-latency connection to a ground station. This ensures we get both the speed of edge processing and the depth of LLM-based analysis.
We are actively fine-tuning our Vision LLM on fire and smoke datasets across diverse environments — forests, urban settings, industrial areas, and various lighting and weather conditions — to maximize detection accuracy and minimize false positives. Our goal is to achieve a system that is not only accurate but also reliable enough for safety-critical deployment.
Challenges We Faced
Building Fluron as high school students with limited resources presented us with significant challenges at every stage. We want to be honest about these because we believe the way we addressed them demonstrates our commitment and problem-solving ability.
| Challenge | Details | How We Addressed It |
|---|---|---|
| Severe weight constraints on a mini drone | Every gram matters on a small quadcopter. Adding a camera, compute module, GPS, communication hardware, and eventually a CO2 cartridge quickly pushes a mini drone beyond its payload capacity, reducing flight time and stability | We created a detailed weight budget for every component and ruthlessly prioritized. We selected the lightest viable option for each module and deferred the CO2 suppression system to a later phase so that our detection prototype remains within safe payload limits |
| AI inference speed versus depth tradeoff | A Vision LLM provides far deeper scene understanding than traditional object detection, but it requires significantly more computational power and time per frame. Running it in real time on lightweight edge hardware is extremely challenging | We designed a hybrid architecture where the edge device performs fast lightweight pre-screening of video frames, and only frames flagged as potentially containing fire or smoke are passed to the Vision LLM for deep analysis. This dramatically reduces the number of frames the LLM needs to process while maintaining high detection coverage |
| CO2 suppression limitations in open air | CO2 works by displacing oxygen around a fire. In enclosed spaces this is effective, but in open outdoor environments, wind and natural air circulation cause the CO2 to disperse rapidly, reducing its effectiveness significantly | We scoped the suppression feature as a Phase 2 addition and are focusing it initially on semi-enclosed environments like warehouses, storage facilities, and server rooms where CO2 is most effective. For open-air forest applications, the primary value of Fluron is detection and alerting, not suppression |
| Limited budget as high school students | Enterprise drone components, high-end compute boards, and professional thermal cameras are far beyond our financial reach as students without external funding | We adopted a philosophy of building with accessible components that prove the concept, with a clear upgrade path as funding becomes available. Our prototype uses affordable modules like the ESP32-CAM and open-source flight controllers, which demonstrate the core functionality while keeping costs under control |
| Regulatory and safety complexity of autonomous drones | Autonomous drone flights are subject to aviation regulations that vary by country, including restrictions on beyond-visual-line-of-sight operations, altitude limits, and no-fly zones | We researched the regulatory landscape in our region and designed our initial prototype to operate within legal limits — low altitude, within visual line of sight, and in controlled testing environments. Our roadmap includes working toward certifications required for expanded deployment |
| Balancing ambition with honesty | It is tempting to overclaim what a prototype can do, especially in a competition. But we believe credibility comes from being honest about what works, what does not yet, and what is a future goal | We clearly distinguish between what Fluron can do now (detection prototype and system design), what we are actively building (fine-tuned Vision LLM integration with live drone), and what is planned for future phases (CO2 suppression, large-scale deployment). We do not present future plans as current capabilities |
What We Learned
Throughout this project we learned lessons that go far beyond the technical work.
Start with the problem, not the technology. Early in our process, we spent weeks debating whether to use an ESP32 or a Raspberry Pi, whether YOLO was better than an LLM, and which drone frame was optimal. We were building a solution in search of a problem definition. The real breakthrough came when we stopped thinking about hardware and started thinking about the human cost of late fire detection. Once the problem was clear, the technical decisions became much more straightforward because every choice was measured against one question: does this help us detect fires faster and more affordably?
Constraints are not obstacles — they are design parameters. Being high school students with no funding, limited access to advanced hardware, and no industry connections felt like a disadvantage at first. But those constraints forced us to think creatively, prioritize ruthlessly, and build lean. We could not throw money at problems. We had to think our way through them. That discipline made our design better, not worse.
Detection alone saves lives. We initially felt that our project would not be impressive enough without the suppression component — that judges and users would want to see a drone that actually puts out fires. But our research showed us that the single most impactful intervention in fire management is reducing detection time. A fire detected 5 minutes earlier can mean the difference between a single fire truck and a hundred. Between one acre burned and ten thousand. Between everyone getting out safely and people being trapped. Detection is not the boring part of fire response. It is the most critical part.
Honesty builds credibility. We chose to be transparent about what our prototype can and cannot do, where the limitations of our approach are, and what challenges remain unsolved. We believe that acknowledging limitations honestly demonstrates deeper understanding than overclaiming capabilities. We know what we have built, we know what is left to build, and we have a clear plan to get there.
What is Next
| Phase | Objective | Key Milestones | Target Timeline |
|---|---|---|---|
| Phase 1 (Completed) | Research, system design, and initial AI prototyping | Completed comparative analysis of existing solutions. Designed full system architecture. Began fine-tuning Vision LLM on fire detection datasets | Completed |
| Phase 2 (In Progress) | Build working detection drone with integrated Vision LLM | Assemble drone with camera and compute module. Deploy fine-tuned Vision LLM for live fire detection. Achieve reliable detection in controlled test environments | Next 3 months |
| Phase 3 | Pilot testing with real-world partners | Partner with a local fire department, warehouse facility, or agricultural operation to conduct supervised field tests. Collect real-world performance data and refine the model | 6 months |
| Phase 4 | CO2 suppression module integration | Design and integrate a lightweight CO2 release mechanism for early-stage fire suppression in semi-enclosed environments. Test effectiveness and reliability | 12 months |
| Phase 5 | Expanded deployment and community partnerships | Deploy Fluron units with partner organizations. Establish a sustainable model for providing affordable fire detection to underserved communities | 18 months |
How Prize Funding Would Be Used
We want to be specific about how competition funding would accelerate our progress.
| Expense | Estimated Cost | Purpose |
|---|---|---|
| Commercial-grade drone frame with flight controller | \$400-600 | Replace prototype frame with a reliable platform capable of carrying our full sensor and compute payload |
| Upgraded camera module | \$50-100 | Higher resolution camera for improved detection accuracy at greater distances |
| Edge compute board (Jetson Orin Nano or equivalent) | \$500-700 | Enable on-device Vision LLM inference for faster and more reliable real-time detection |
| Thermal sensor module | \$100-200 | Add thermal imaging as a secondary confirmation layer to reduce false positives and enable night operation |
| Testing supplies and safety equipment | \$50-100 | Controlled fire testing materials, fire extinguishers, and safety gear for responsible prototype testing |
| Total | \$1,100-1,700 | Enough to build a fully functional detection prototype ready for field testing |
Built With
- Quadcopter drone frame
- ESP32-CAM (prototype camera module)
- Fine-tuned Vision Large Language Model for fire and smoke detection
- Pixhawk-compatible flight controller
- GPS module for navigation and geo-tagging
- LiPo battery system
- Wireless communication module
- Python
- Open-source flight control software
- CO2 cartridge suppression system (planned for future phase)
Fluron — Early Eyes Before the Fire Spreads



Log in or sign up for Devpost to join the conversation.