-
-
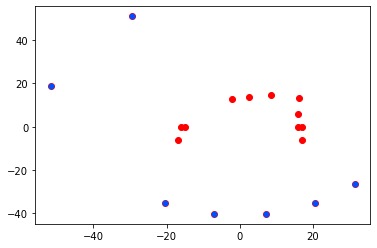
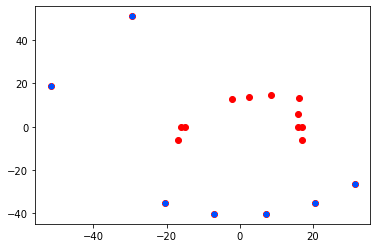
This is the out put from the video, you can see it maps the boxes but doesn't know what to do about the non-boxes
Inspiration
I saw the robot kit and tried to think about useful ways to use the sensors.
What it does
It creates a point cloud on a graph of distances relative to the robot in an arc. It does this by using the distance measure from the ultra sonic sensors and the angle from the servo programmer to create a list of polar points which are then converted to Cartesian and plotted. in python.
How we built it
I assembled the kit then changed one component and added another ultra sonic sensor.
Challenges we ran into
Most of my time on this project was spent trying to figure out how to get the Bluetooth module to work on the robot. It uses hm-10 as its ble to communicate but there is not a tone of documentation about the necessary codes to do interfacing with that module. I also had to do a lot of hw this weekend so this came second to a certain degree.
Accomplishments that we're proud of
Using a python script to interface with the module, the cloud map generated. The ability to highlight undefined points.
What we learned
Always use hm-5 if you only have a time limit
What's next for floor mapper
Im gonna add a hm-5 module to it and make an app instead of a python script. I'm also gonna add some automation steps so it drives in the direction of unmapped points.

Log in or sign up for Devpost to join the conversation.