


Inspiration
The original idea came from Brett Altena's (Sr. CprE) Senior Design Project in Computer Vision for which his team plans to use a six-axis arm and computer vision to identify when and where to flip a pancake and to perform that function. This led Charlie Wickham (Sr. ME) to pitch the concept of tackling the mechanical side of a pancake robot using simpler methods within the time and resource constraints of HackISU. Recruiting members Spencer Dove (So. ChE) and Billy (Sr. ME) on the first day of the event, the team set out work on the ambitious FlipJack project.
What it does
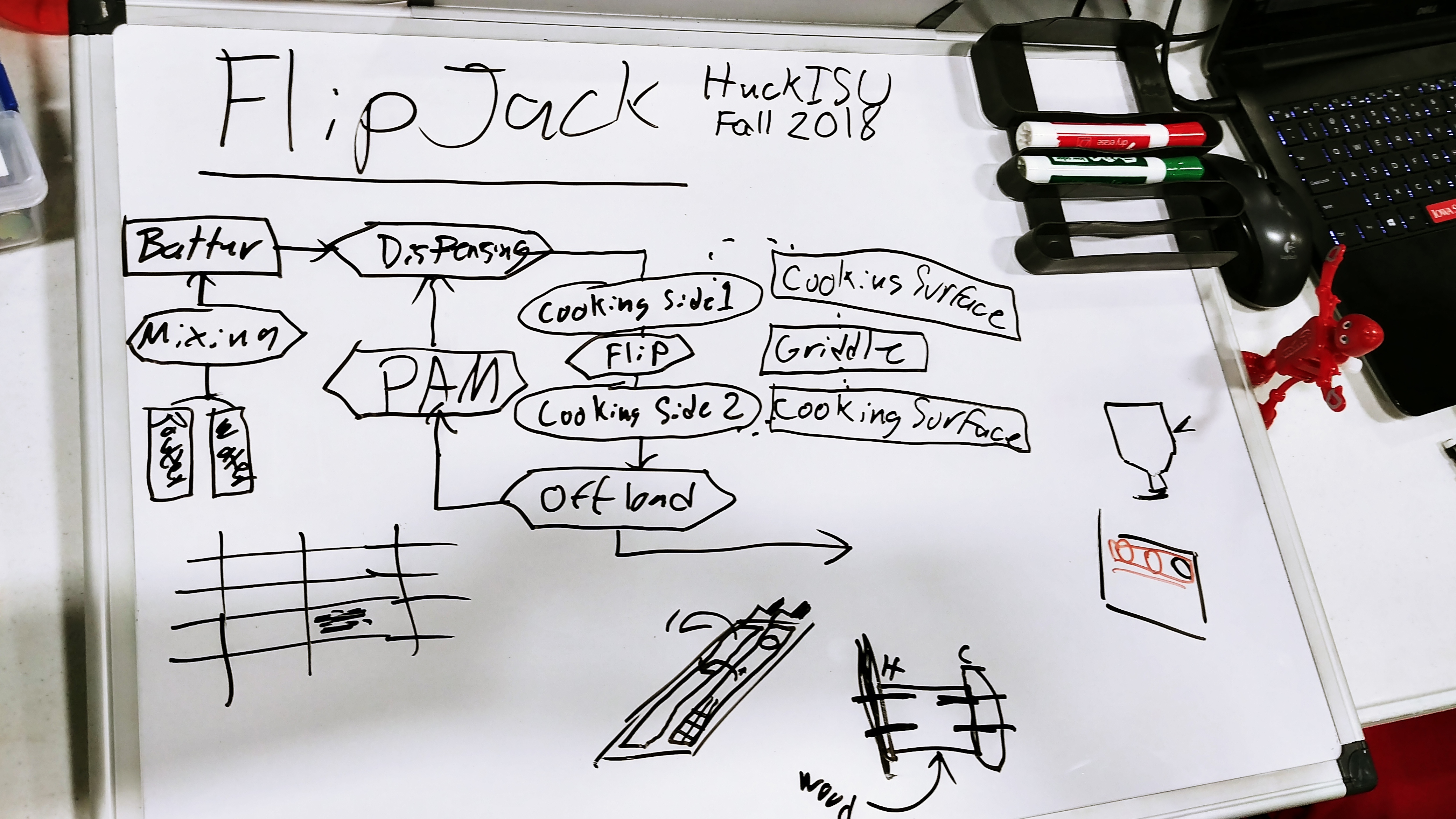
The FlipJack automatically pours pancake batter, cooks pancakes, flips em, and then serves pancakes. The entire process is automated by an Arduino Uno keeping time and controlling servo motors. The pancake making process can be done in three stages: dispersal, the first side, and the second side. The dispersal stage consists of sliding a 3D printed gate to a set location to allow the flow of pancake batter from the batter containers onto a metal sheet. The first side stage consists of cooking the first side of the pancake for 10 minutes to allow the side to brown thoroughly without burning the pancake. The transition to the next stage happens by a servo flipping the piece of sheet metal 180 degrees so that any pancake being cooked is moved onto the next piece of sheet metal. After this transition is complete, the dispersal stage is repeated so that the next set of pancakes starts to cook. The second stage consists of cooking the opposite side of the pancake for 10 minutes. After the completion of this stage, the second piece of sheet metal is flipped 180 degrees and the fully cooked pancakes are dropped onto a serving platter.
How we built it
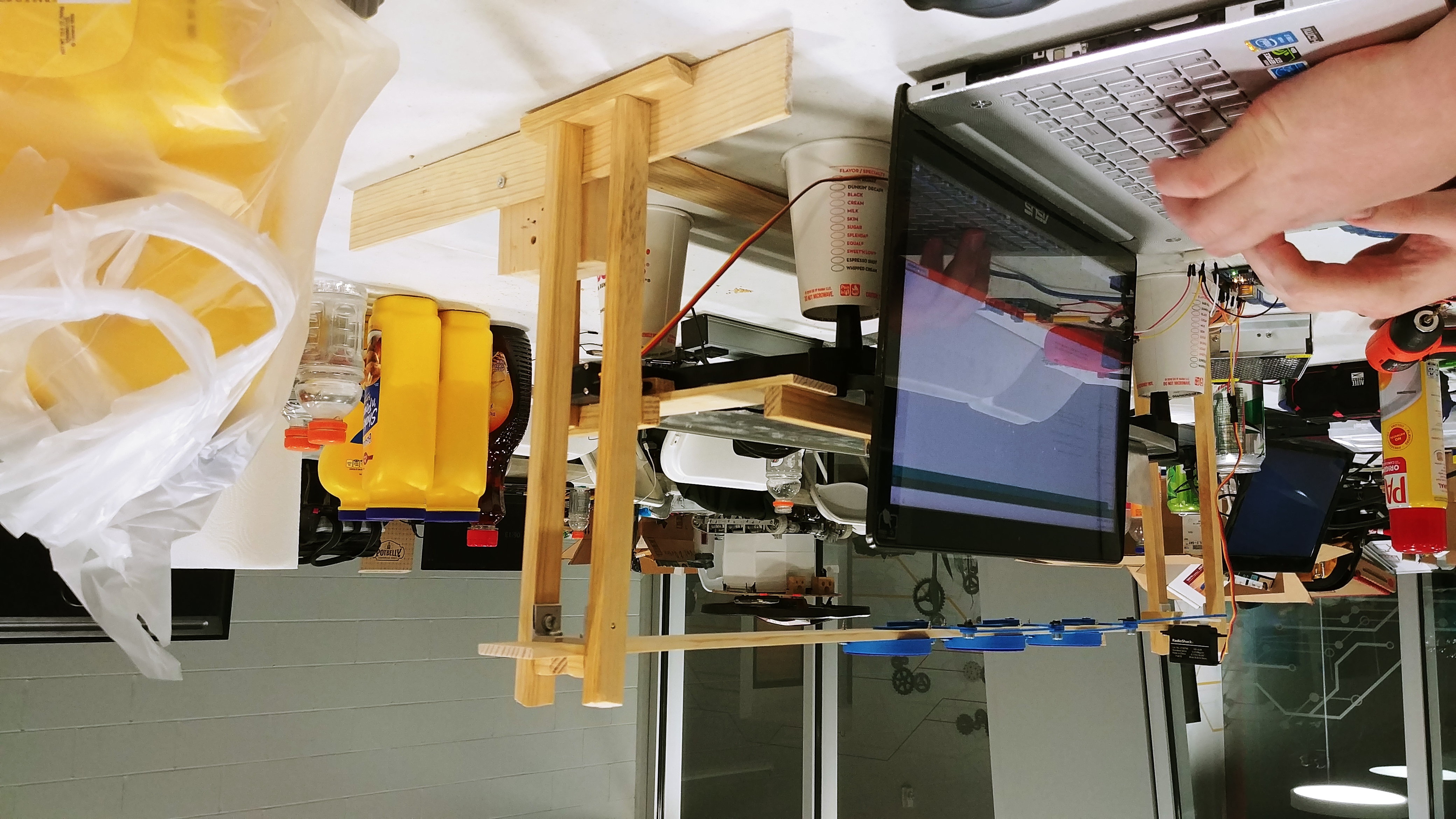
The pancakes are cooked by a simple, off the shelf griddle. Our design builds off of this basic product to add automated features. To pour the pancake batter we suspend containers of batter over the griddle with a wooden construction and custom designed 3D printed valve parts. Rather than attempting to insert a spatula under a cooked pancake, we simply cook on pieces of sheet metal attached to a servo. We used aluminum, due to its high heat conductivity and low cost. The aluminum was bent by hand and cut using pliers to fit the measurements designed. Materials are scarce, so our team sought to use readily available and lightweight materials like wood that could withstand ambient heat and reasonable loads. The woodworking was done by using tools (Saw, Tape Measurer, Writing Utensils, Drill, Screw Drivers, Pliers) brought by one of the team members using drawn up calculated designs done by Charlie. We used 3D printed parts to construct the valves/gate mechanism to utilize the precise measurements calculated and that it was efficient to custom make the parts. The containers used to hold the pancake batter were the bottles that the mix came in so that the replacement process would be quick.
Challenges we ran into
Ensuring a sufficiently heated cooking surface proved incredibly delicate, as the modification of our sheet metal for our needs caused uneven surfaces with very little contact with the heated griddle surface, extending our cooking duration. Adhesion between the pancake and the aluminum surface proved to be a consistent struggle, as PAM spray did not perform as expected due to decreasing the heat transfer between the pancakes and the surface.
The first challenge ran into with the control system occurred while developing code and running the stepper motors. Working with the Arduino IDE proved to be inconsistent because the software continuously denied access to the Arduino board for unknown reasons. Once the code was uploaded, the stepper motors (Mercury Motors ST-PM35-15-11C) connected to a motor driver (Qunqi L298N Motor Drive Controller Board) would heat up significantly and smoke after minor use. We then switched to using Parallax servos which simplified the code development and proved to work efficiently and effectively.
In the final testing stage, we ran into the issue that the batter would thicken as time progressed, the weight of the containers proved to be too much, and the Arduino's timer proved to be inaccurate. The thickening problem was addressed by manually squeezing the container while the gate was open, re-shaking the container, or replacing the container with a new one filled with fresh batter. The overhang piece of wood containing the gate mechanism and the containers could not effectively support the weight of the before mentioned items. The wood would bend as more than one container was added and allow the batter to be released from the containers when the gate mechanism was closed. This issue was fixed by only using one container because there was not enough time to allow the construction of proper support beams to help dissipate the weight. The Arduino's timer was set to allow the pancakes to cook for 10 minutes before transitioning to the next stage, but after each loop of the code, the transition between stages surpassed the 10-minute mark more and more.
Accomplishments that we're proud of
For the Chem E side of the project, we found an equation of flow rate which included a viscosity equation. Using this equation we determined the size of the drill bit and gate size required to allow the batter flow as expected. We found the viscosity by its mass/volume and plugged it into the Poiseuille equation which gave the flow rate of the pancake batter given different nozzle sizes. That the process was automated up to a certain extent and was able to produce 2 pancakes every 10 minutes after the initial setup. For the mechanical side of the project, we repeatably came up with many mechanical designs involving linkages and cantilevers, incorporating all the functions into a single structure. For the software side of the project, we programmed the Arduino effectively to run on a loop to control each servo to work as expected (Turning to certain degrees exhibiting specified rates at measured time intervals).
What we learned
Arduino programming, Additive manufacturing, fluid dynamics, heat transfer, food science.
What's next for FlipJacks
Putting IHOP out of business... At the current rate of 2 pancakes every 10 minutes our product has a very long road ahead of it before IHOP should be worried.
This is the first prototype of the pancake-making robots that the team leader, Brett, has in mind. The upgrades that this product will have built onto the current design will be a method to automatically spray PAM before each dispersal stage, a method of pouring syrup onto the cooked pancakes, a button to turn the product on and off, a method of selecting the quantity desired, and a timer to represent the time needed to complete the user's request. These upgrades will only be implemented after the current challenges are fully fixed to ensure that the current process is able to be automated more effectively.
Built With
- 3dprinting
- arduino
- metal
- pancake
- servo
- solidworks
- wood



Log in or sign up for Devpost to join the conversation.