-
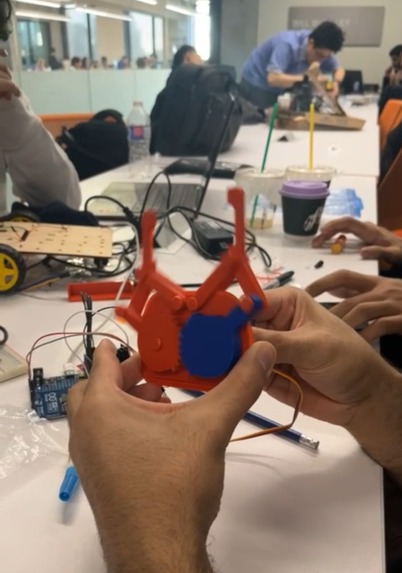
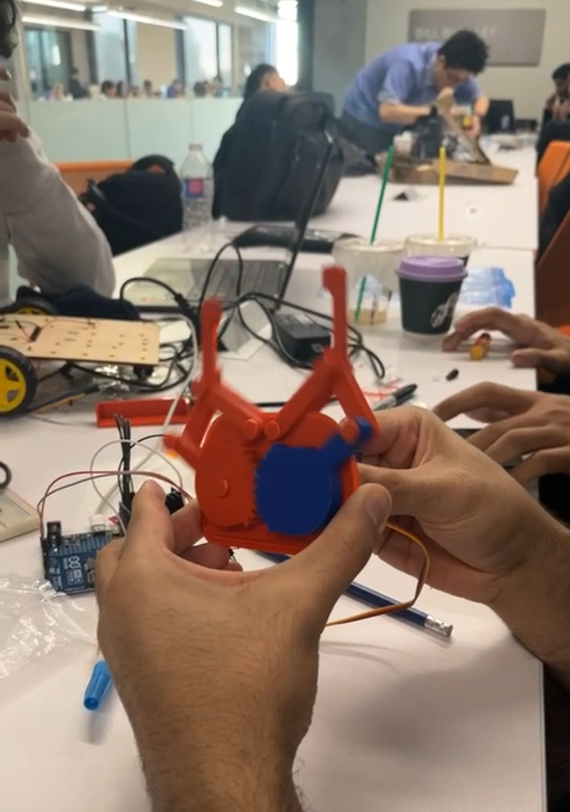
Testing the claw
-
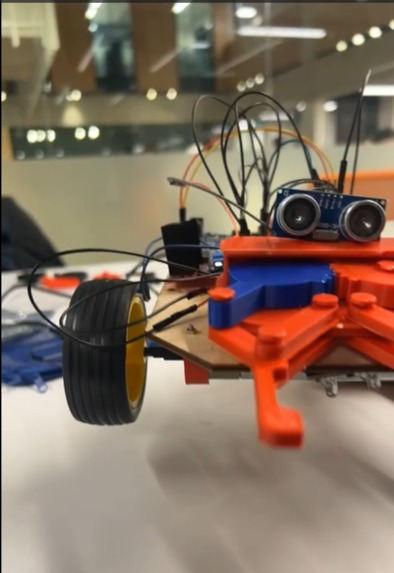
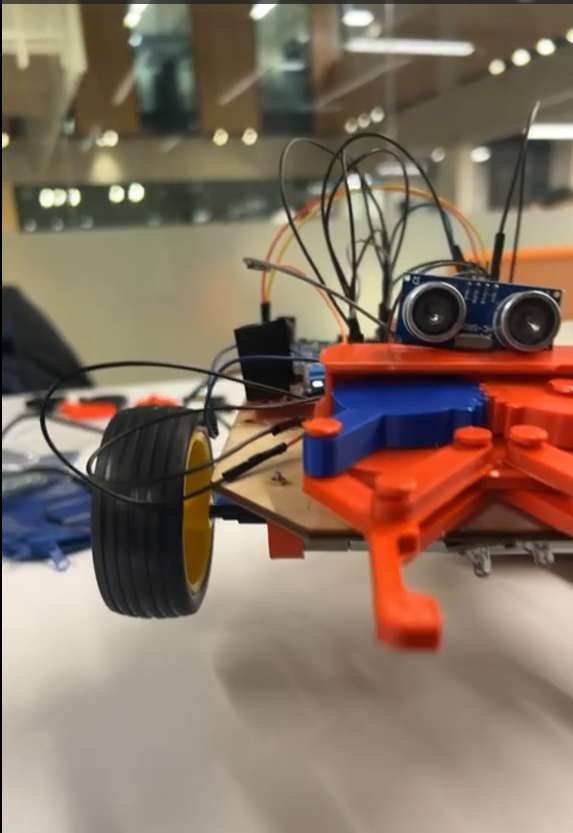
Testing the wheels
Inspiration
We attended UTRA Hacks for the first time in 2024, initially we didnot understand where to start nor how to set up the autonomous rover then. This time, we are returning with an advanced skillset and a greater understanding of how rovers and detection work. We aimed to use UTRA Hacks 2025 as a redemption arc for any shortcomings we experienced in 2024.
What it does
Flag Catcher 878 makes use of it's Servo-powered claw, built with 3D printed parts, to automate the retrieval of flags given that specific colors have been detected or that the flag is near the claw's reach. Flag Catcher 878 also avoids obstacles such as walls and boundaries for a smooth autonomous movement.
How we built it
Flag Catcher 878 consists of ultrasonic and color detection sensors responsible for detecting obstacles in the rover's path and the colors that the rover traverses, respectively. To make the autonomous rover move, motors and wheels were attached on both sides of the chassis and a ball with it's ball bearing was situated behind the motors. The claw was built with 3D parts and assembled as if it was a puzzle. Finally, there exists the battery, to power the motor control circuit and the arduino, to power the sensors.
Challenges we ran into
Our major challenge that we ran into was adjusting the servo to work with the claw. Either the gears of the claw were moving up when they were not supposed to or the servo continued to fall off the gear associated with it. Additionally, the color picker module was too complex to properly learn in a span of 24 hours. Finally, there was an issue that existed where one motor was turning but the other wasn't.
Accomplishments that we're proud of
Our main accomplishment that we are proud of is that we finally got the Servo to align and work properly with the claw. This accomplishment is very significant as the Flag Catcher 878 can not be a flag catcher unless it has a claw to catch a flag with. Besides that one main accomplishment, we were very excited and relieved when both motors finally managed to work and both wheels managed to turn properly.
What we learned
The most important thing that we learned from doing this 24-hour hackathon is time management. We can have as many technical skills related to mechanical work and programming as we want however if we do not have time management then the mechanical work and programming that we do will not mean anything in the end. Besides time management, we also learned how to better work as a team and how to delegate tasks to those that show a strong understanding of the skill required to complete said task.
What's next for Flag Catcher 878
Flag Catcher 878 is a better innovation on our standard rover from last year, however there were pitfalls that existed which hindered our ability to properly deliver a strong and efficient rover. Nevertheless, we are proud of our creation and we hope to improve further on it through strong teamwork and time management skills in conjunction with our knowledge of Arduino software and hardware.

Log in or sign up for Devpost to join the conversation.