-
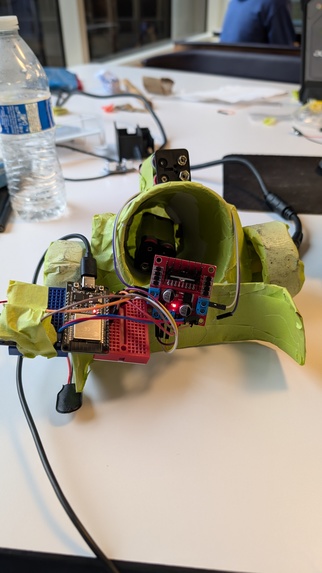
Final Take
-

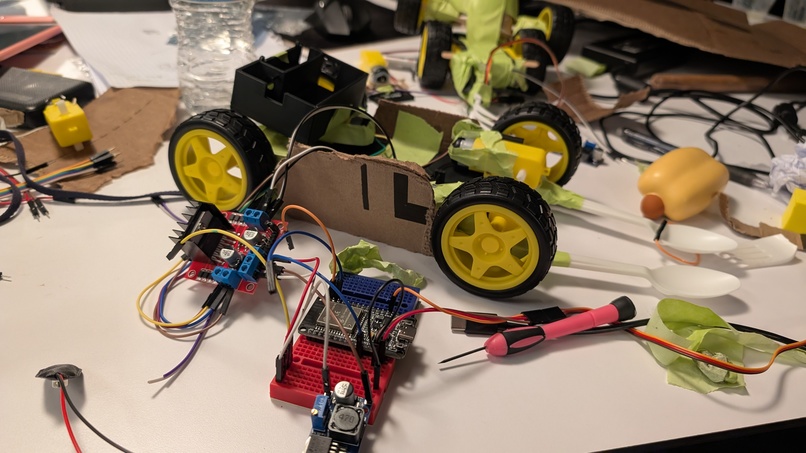
Early Concept
-
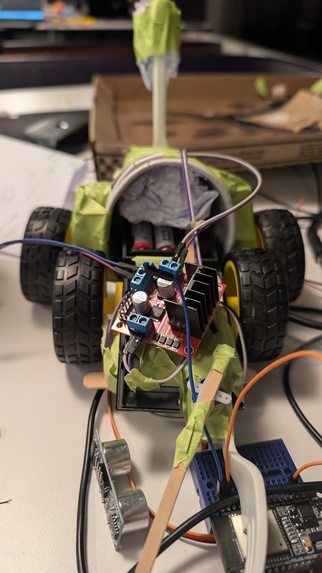
Scrapped Structure
-
Developing Classic

Firehorse Robot
Overview
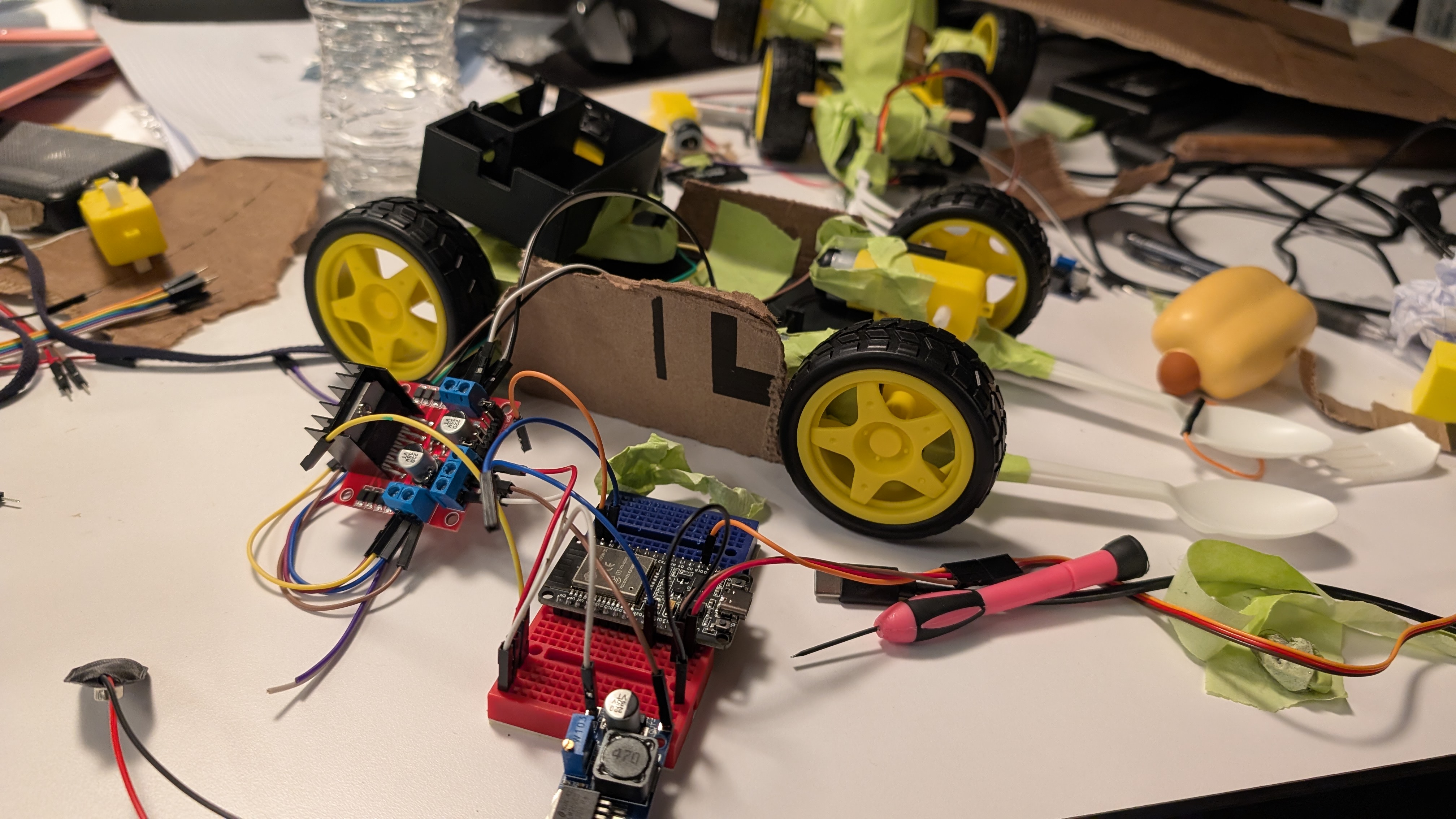
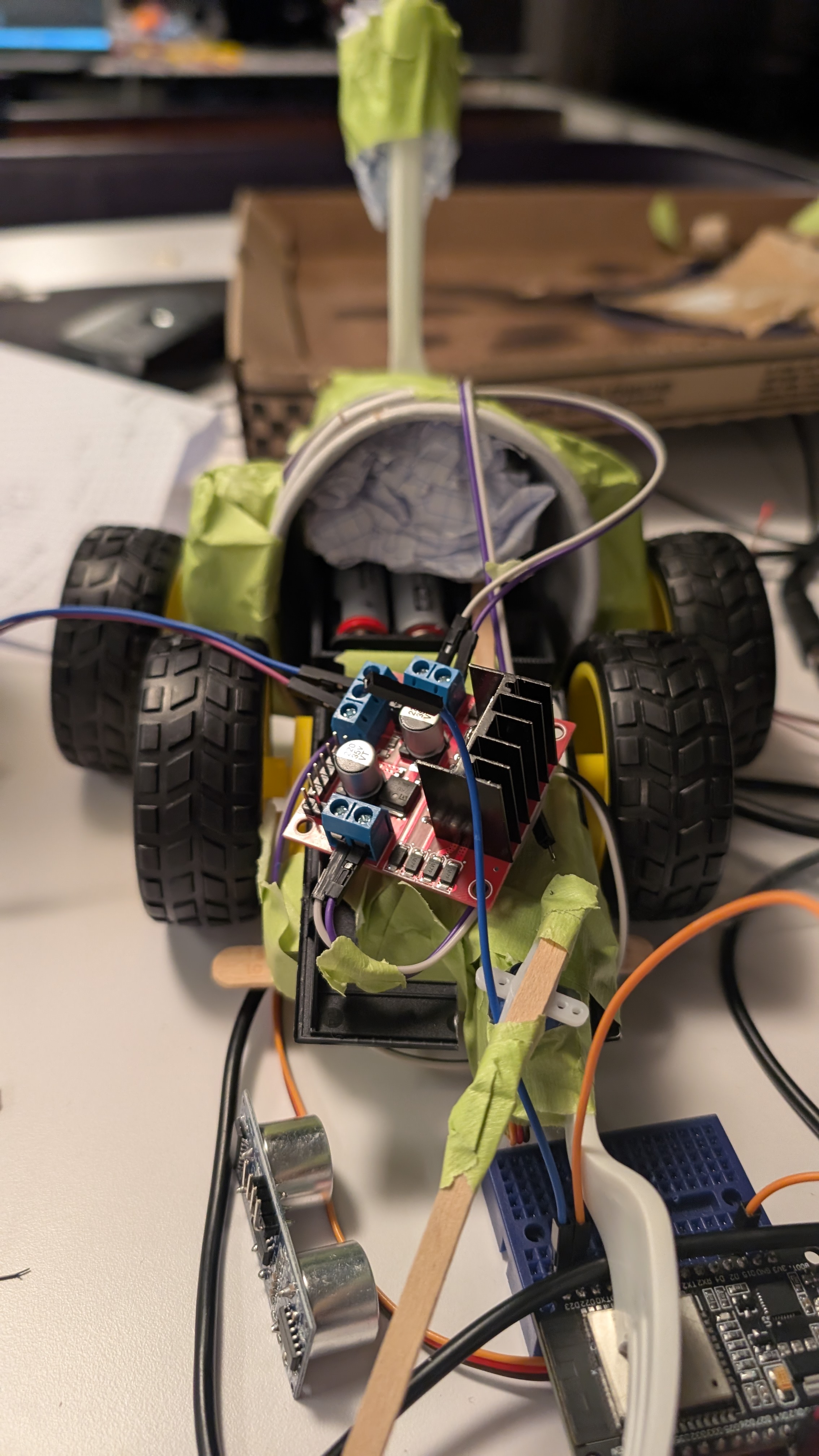
The Firehorse robot was built using an ESP32 microcontroller and a mix of salvaged and improvised parts. The original plan was to create a fully independent robot with attachments to score cubes, and while there were some unexpected challenges, the project still came together in a functional form. Despite setbacks like a failed 3D print, alternative materials were used to keep things on track.
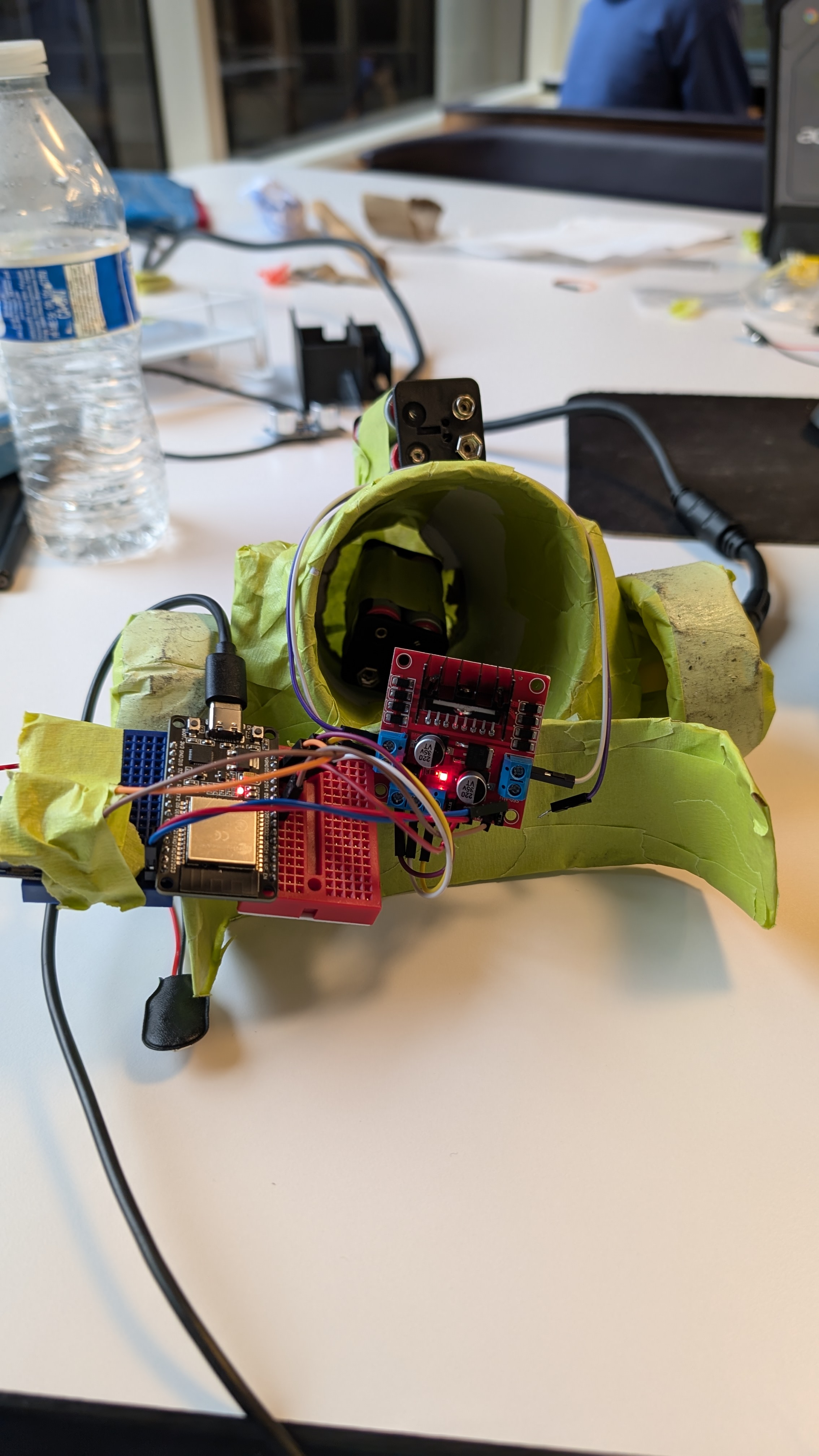
Components Used
- ESP32 microcontroller
- L298N motor driver
- DC motors + wheels
- Breadboard + jumper wires
- Chassis made from available materials, including paper cups, tape, and wooden sticks
Construction
The design initially included a custom 3D-printed chassis, but after the print didn't turn out as expected, the build had to adapt. Using lightweight materials like plastic and paper cups, the structure was assembled quickly to keep development moving. Wiring required extra attention to maintain stable connections, and adjustments were made along the way to improve motor control and balance.
Challenges
- The 3D print didn’t work out, requiring a shift to different materials.
- Some wiring issues led to occasional disconnects, which had to be fixed on the go.
- Initial motor performance needed adjustments for smoother movement.
- Stability was tricky due to the makeshift chassis, requiring small reinforcements.
Results
Despite some rough edges, the Firehorse robot successfully moved and responded to commands. The ESP32 worked well with the motor driver, allowing it to roll around and attempt its objectives. While there’s plenty of room for refinement, the project demonstrated core functionality and a solid starting point for future improvements.
Future Fixes
- Implement a sturdy, properly fitted 3D-printed chassis.
- Improve wiring management to reduce connection issues.
- Add sensors for better navigation and obstacle avoidance.
- Optimize power management for more reliable motor control.
Built With
- ino
- python

Log in or sign up for Devpost to join the conversation.