-
robotic platforms
-
Inspiration
There is a need for an automated electromechanical system that can rescue elderlies who cannot hear too well and in case of house fire these automated system need to wake them up and rescue them to a safe zone and put off the fire.
What it does
The task given was to develop a mechanical system for the Caretaker and the elderly that can autonomously look for a signal representing a danger nearby, and when that is checked the system should move towards where the elderly is resting at, and when it is 12 inches from the elderly the system should either touch or signal the elderly to wake it up. Once the elderly awakes it should move towards a safety zone. Once that happens, the Caretaker system should then locate where a water source is and move towards it to collect ~1 ounce of water. Then, it needs to move towards the fire zone and put out the fire. Then finally it needs to go back to where the elderly is and then give it some water.
How I built it
First tradeoff study took place to figure out what components are needed to make this work out, and from which I got amount of power needed to run this system for ~ 30 minutes (for battery). Then I did mechanical design with Solidworks to come up with several prototypes. Electrical breadbording was done next to make sure our designed circuit can run and control the motors and the camera. Next was coding up arduino for computer vision works and controls algorithm implementation.
Challenges I ran into
Power issue was the most difficult challenge I had to overcome. It took a while to figure out that the battery I bought was not compatible with the system I built. Another difficulty that I faced was to able this vehicle to run in an uneven bumpy surface where the wheels get stuck in a pit or the bottom surface of the body gets caught on a bump and the wheels lose contact with the ground.
Accomplishments that I'm proud of
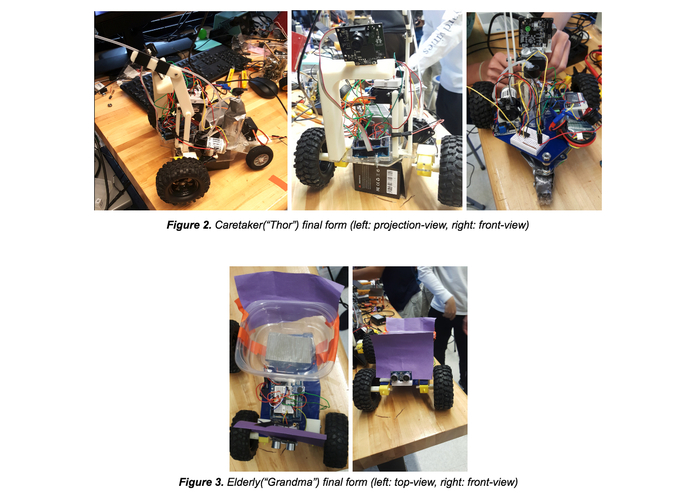
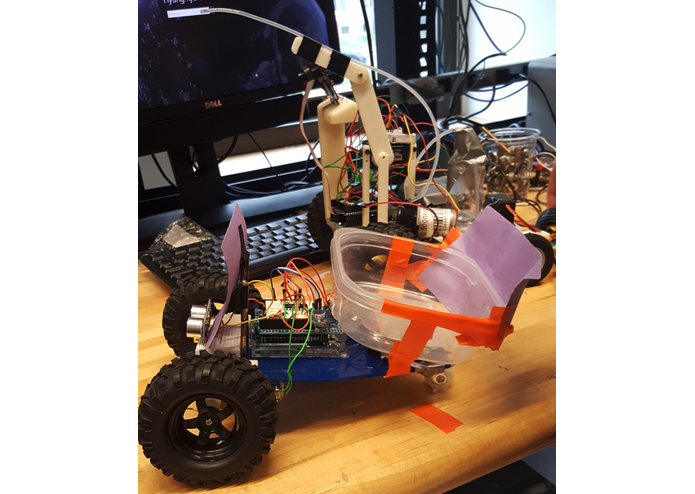
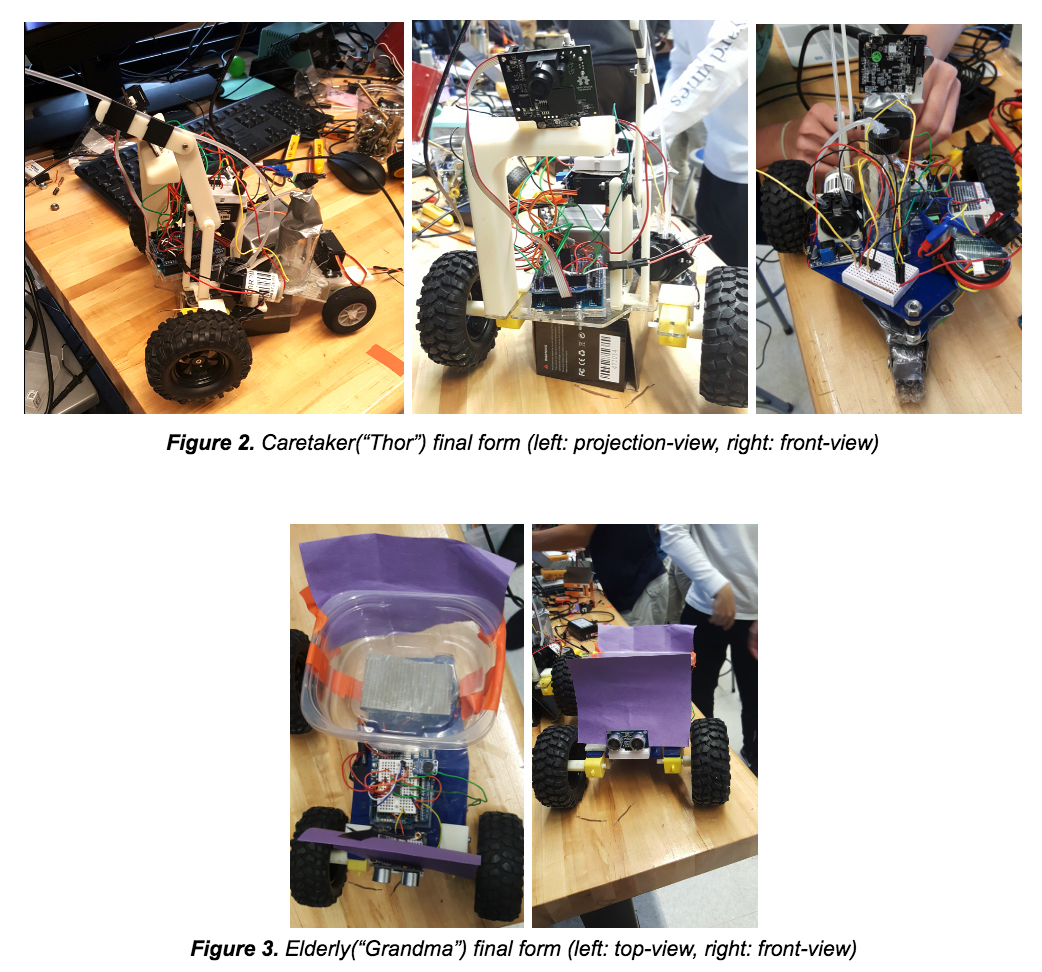
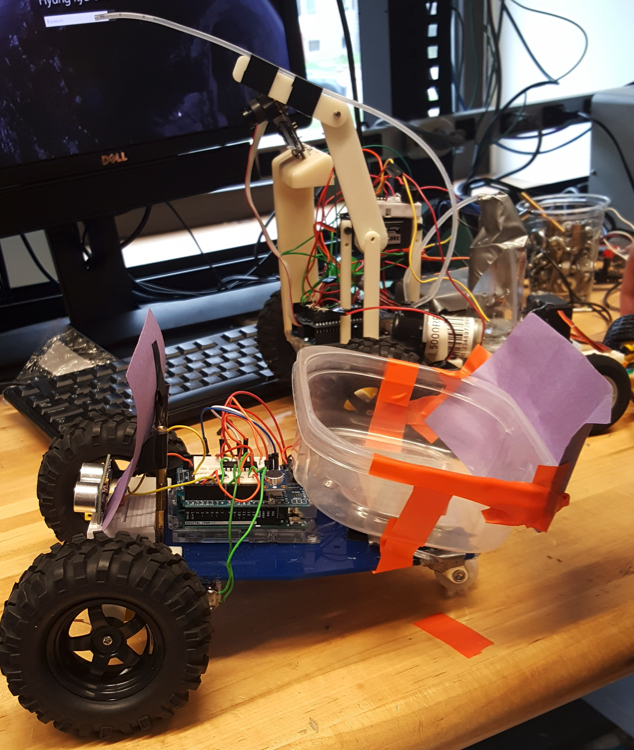
I've attached a unique third wheel design as a replacement of a caster wheel, which is a wheel mounted onto a servo motor. To control the turning all I had to do was to control the steering angle of the servo motor from 0 to pi/2 in radians, which enabled all direction 360 degrees rotation.
What's next for Fire-fighting elderly care robot
I'm planning to develop this project into a Mars rover design, with 6 - 8 wheels with self-adjustable wheel height, and much stronger water dispenser. I plan on implementing visual odometry using much more advanced camera and use Lidar SLAM as well.
Built With
- arduino
- pixy
- plastic-parts

Log in or sign up for Devpost to join the conversation.