Inspiration
Our inspiration for this project arose from the daily inconveniences shoppers face while getting items from a shopping facility. The customers typically move around with their shopping carts across the many isles to get their produce. This is cumbersome. To solve this, we have decided to build a follow-me shopping cart to simplify the users shopping experience. With this device, the shopping cart will follow the customer making it more convenient for our user to purchase their products. The developed device could be added to various shopping cart sizes and make real-life shopping life much more convenient. One of the challenges to be addressed is how to identify our user from the pool of all other customers within the same area. Supermarkets can get crowded plus any interaction between our user and other people should not interfere with the robot’s function. To solve this problem, we will use Bluetooth and configure our robot to link with a Bluetooth enabled device e.g. cellphone, fitbit etc.
What it does
Our robot can autonomously follow an object. It can move forward, backwards, left, right and stop. Additionally, the robot can be controlled by a user using Bluetooth. The user can user the Adafruit App to control the robot, stop, move left or right.
How we built it
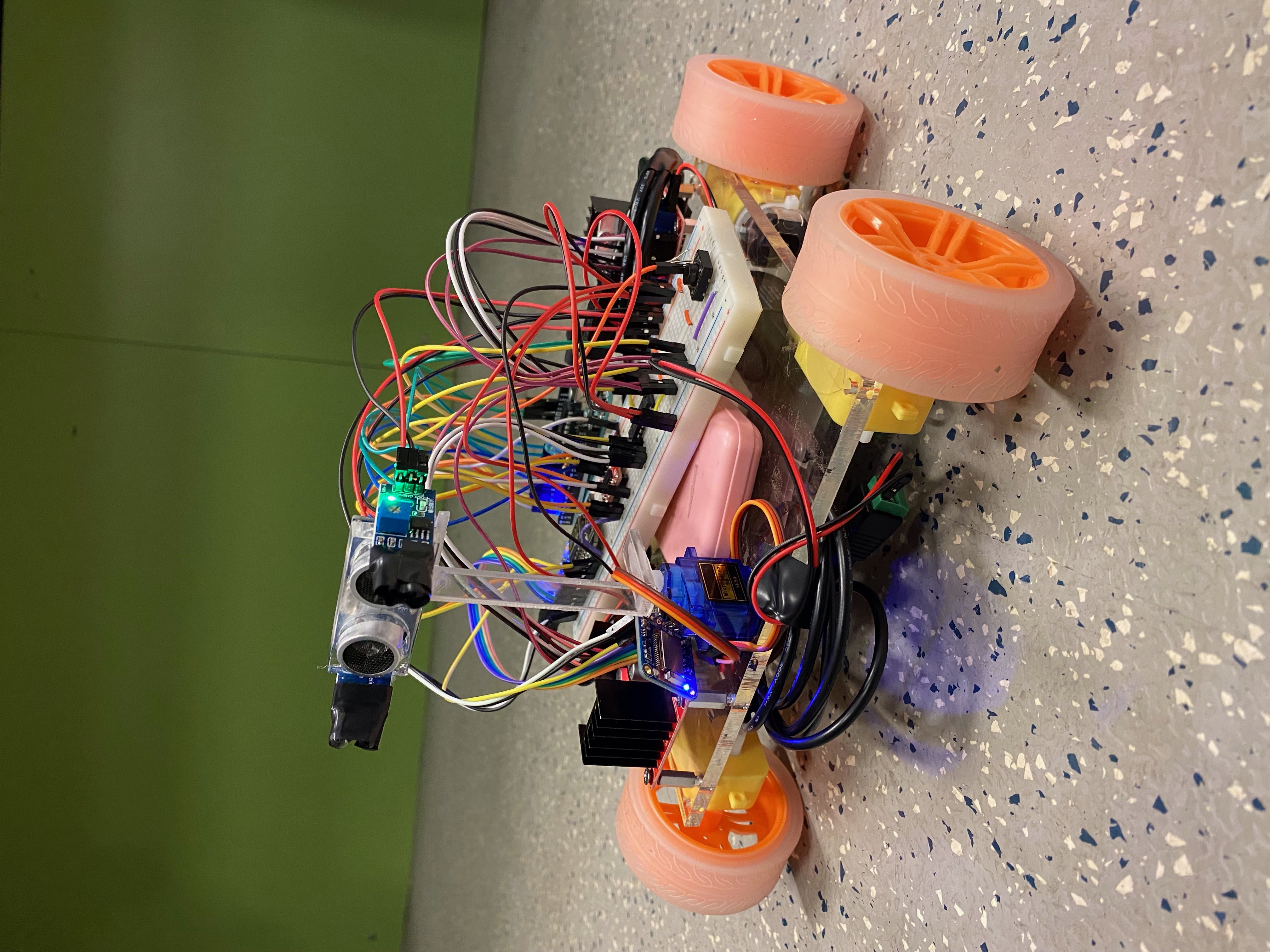
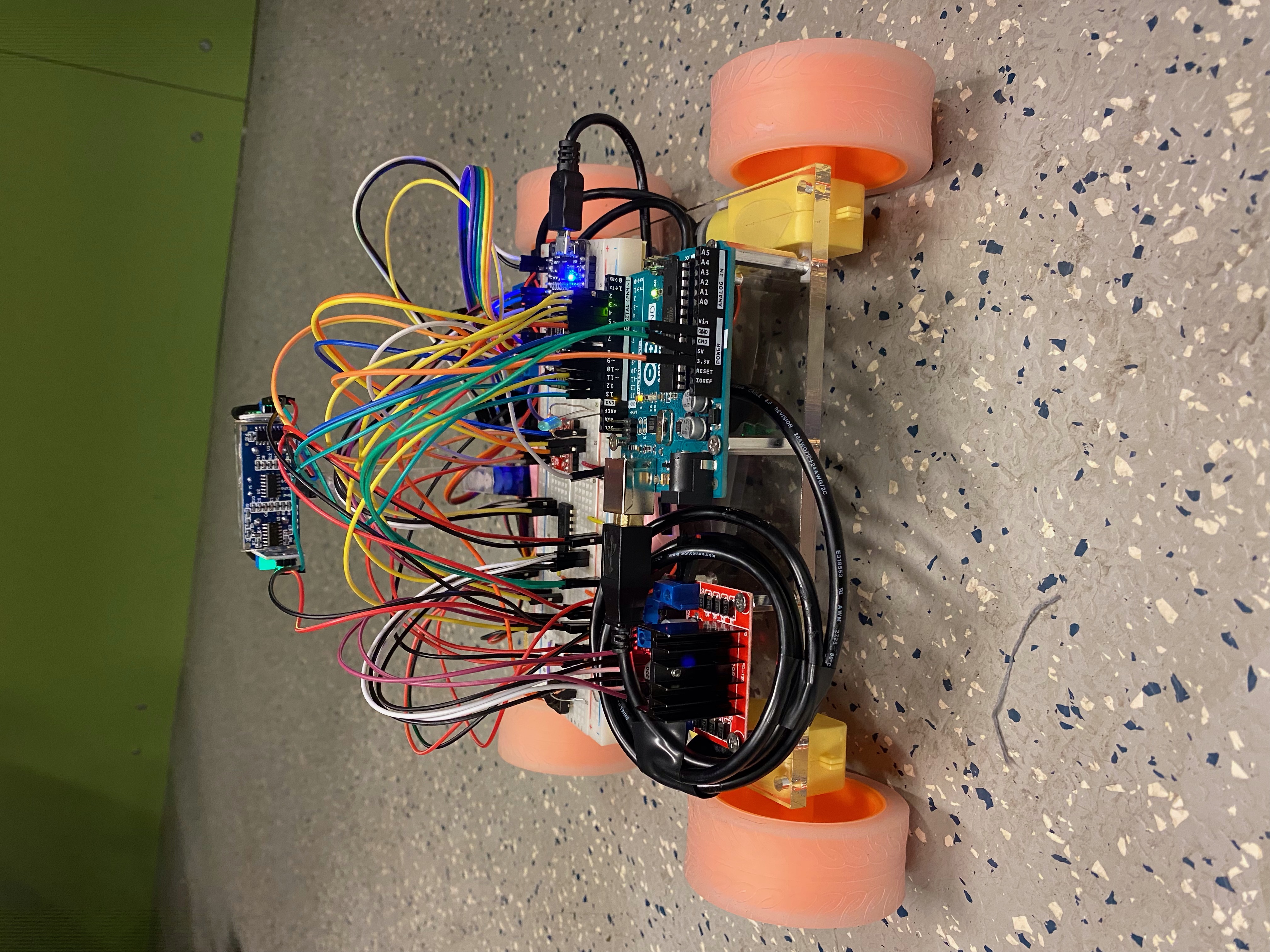
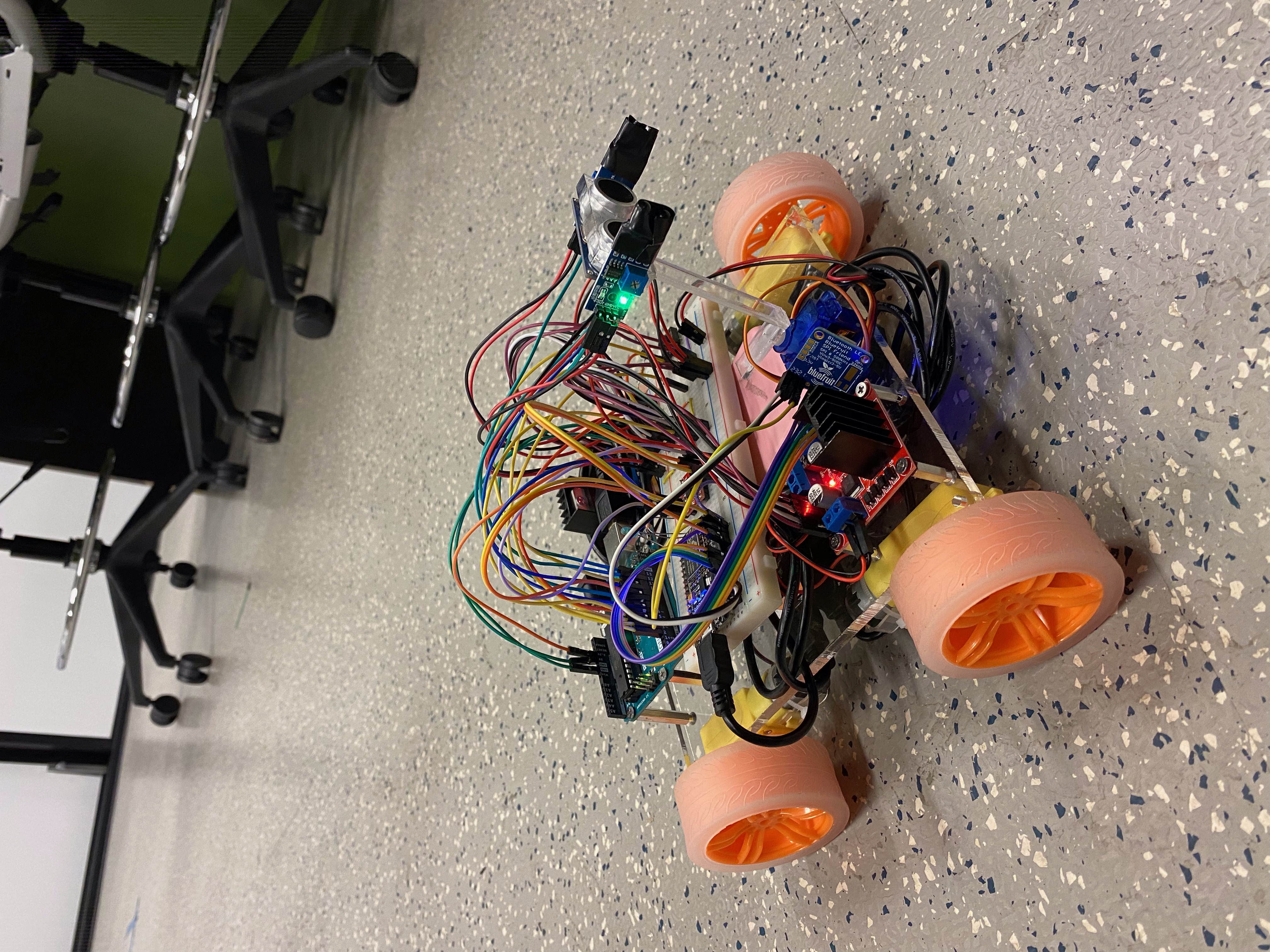
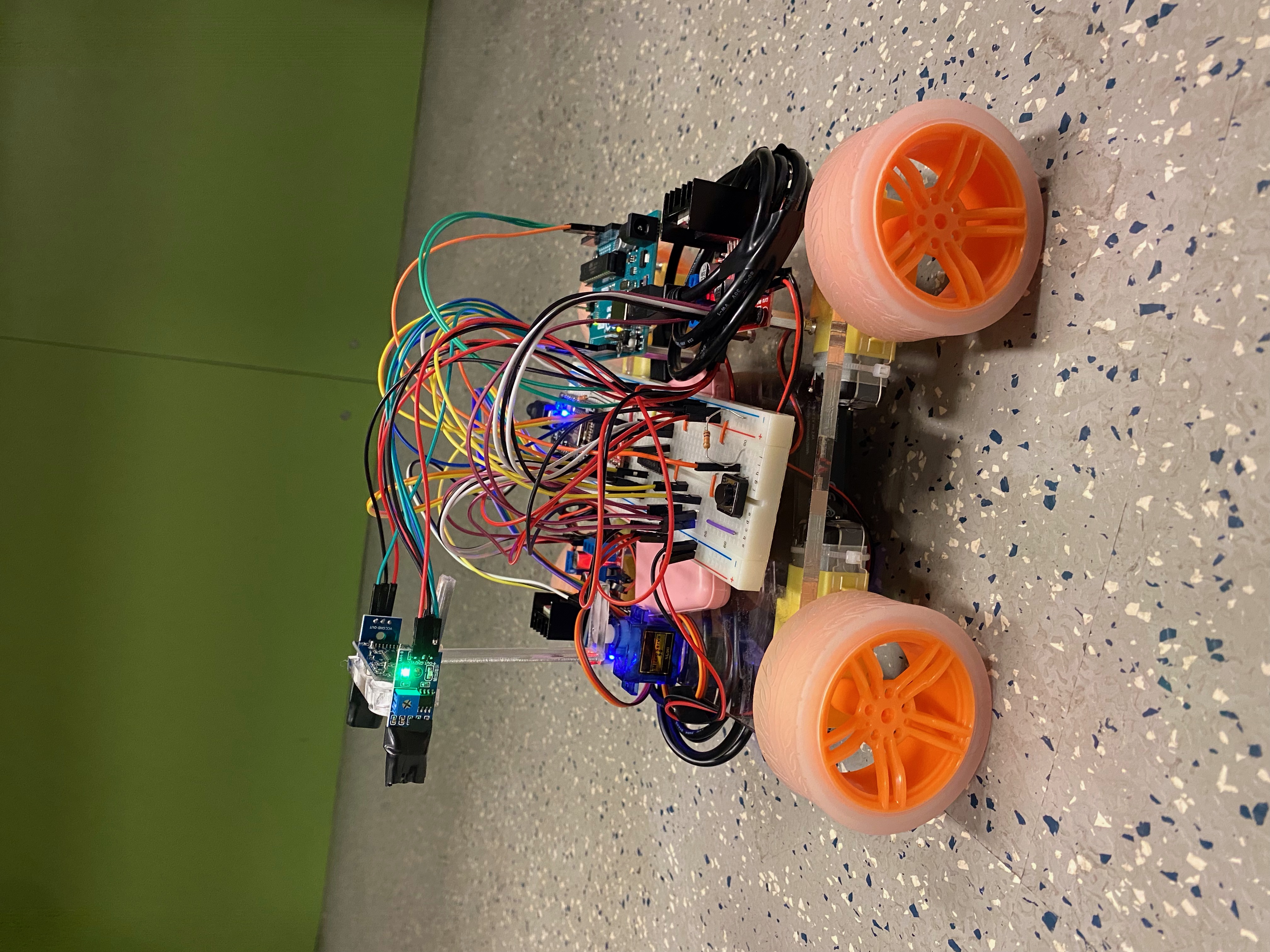
The “head” of the robot containing the IR sensors and the ultrasonic will be able to turn, facing our user all the time. The ultrasonic detects the exact distance between the robot and the detected obstacle. This information can then be used to calculate the speeds of the four wheels. Using the Bluetooth module we will establish a connection between the robot and a specific cell phone. The user can the send commands to the robot.
Challenges we ran into
These are some of the challenges we ran into:
- Bluetooth signals do not provide information on proximity. Therefore we couldn't rely on the pairing to provide the distance to the user.
- The IR sensors were not reliable. They would work intermittently.
Accomplishments that we're proud of
Developing a working robot that can move autonomously and also via Bluetooth.
What we learned
- Perform adequate research on sensor as they are critical to the success of the project.
- Integrate sections sooner. Systems may be capable of functioning independently. Once they are integrated, they may not perform accordingly. It is therefore important to merge the systems early and detect any failures.
What's next for Final Project
One can use this model and actually attach it to a shopping cart.
Built With
- arduino
- c/c++


Log in or sign up for Devpost to join the conversation.