-
-
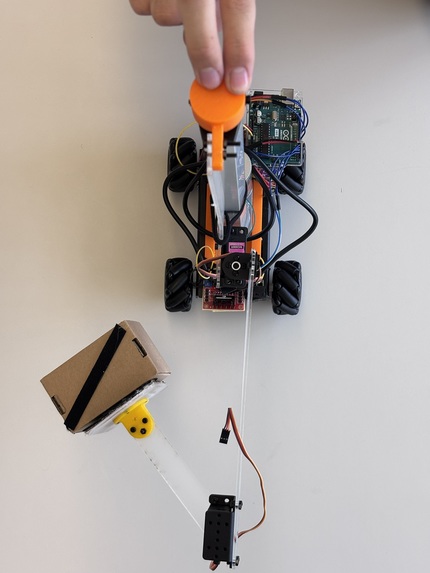
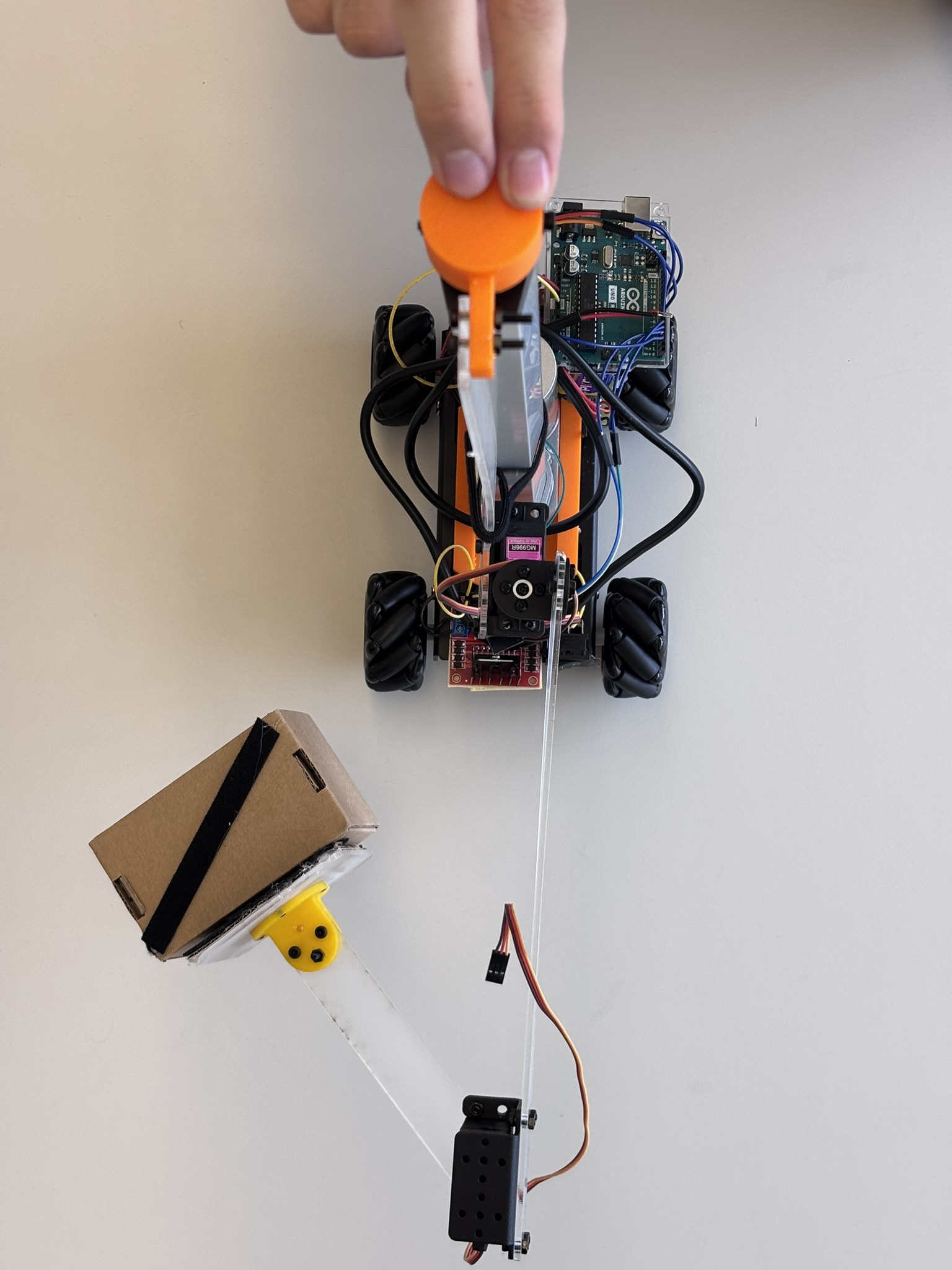
Top view of robot
-
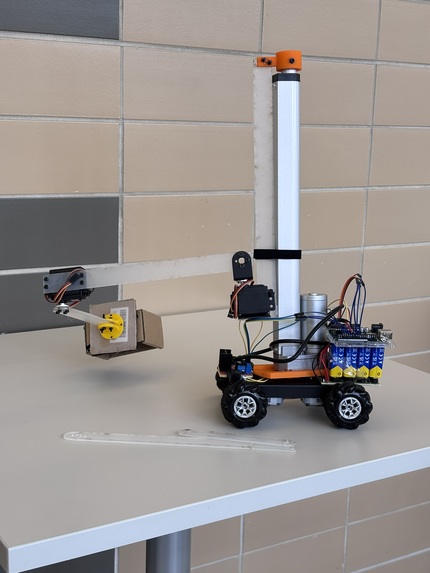
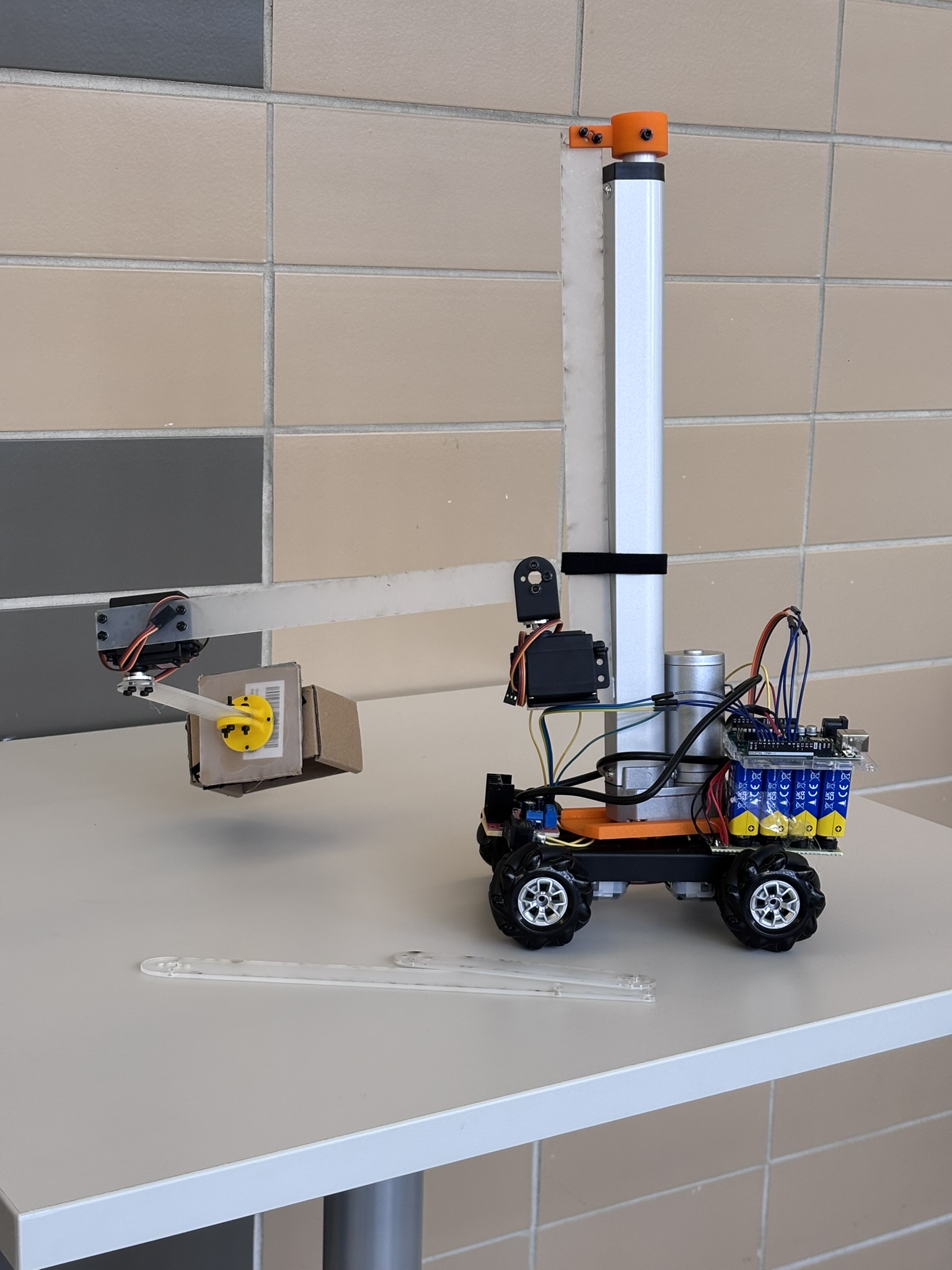
Side view of robot with picked up package
-
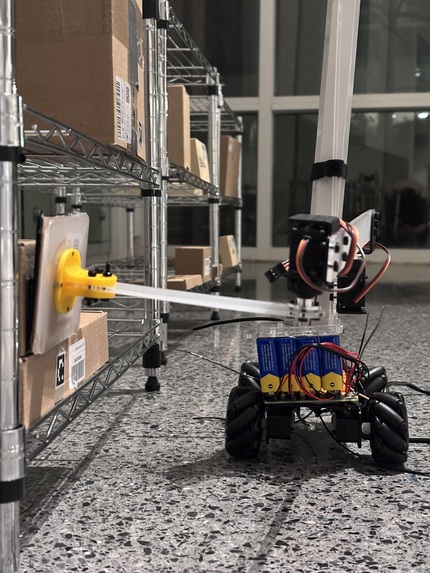
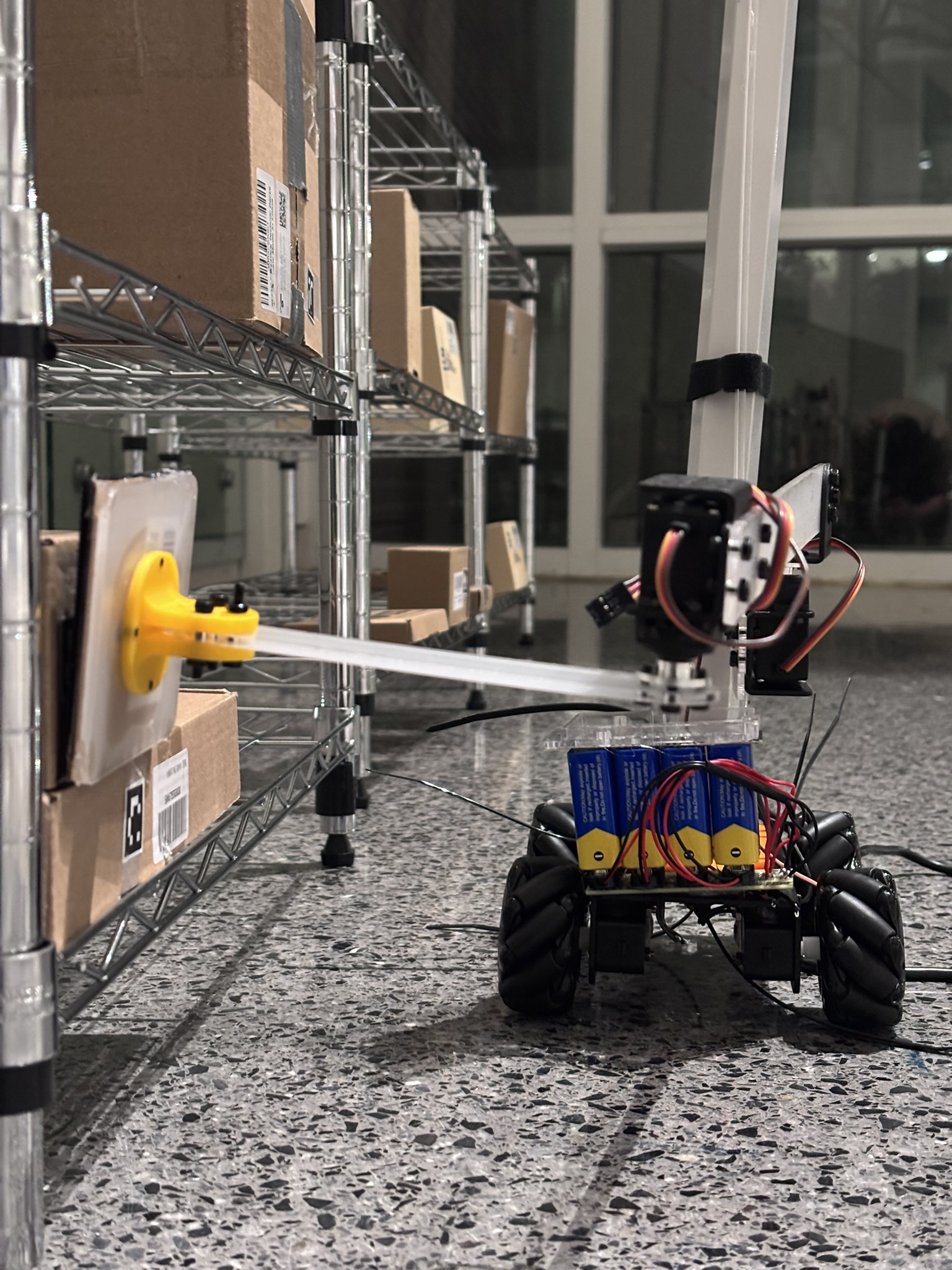
Side view of robot testing with provided shelves
-
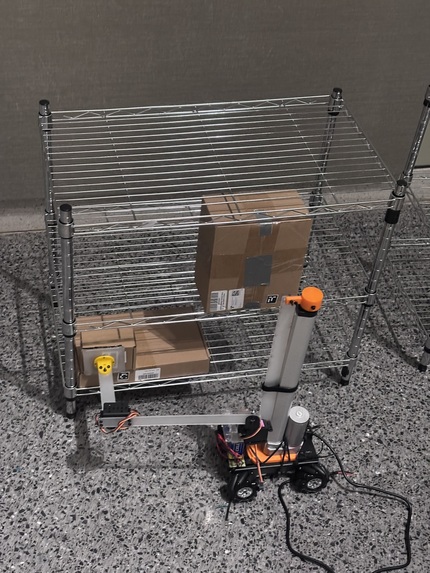
Robot testing with provided shelves

Inspiration
We were interested in exploring solutions to automate the pickup of heavy boxes from bins in warehouses. This process is typically challenging for workers, as they must load a large number of boxes onto their carts and make multiple trips. Manual labor increases operational costs and also reduces productivity.
What it does
Our team planned to demonstrate a robot that can automate the process of picking boxes from bins in an Amazon facility, identifying the correct box, and storing it in a cart. Our solution consists of a drive base with an arm attached to it, along with two carts, to facilitate the retrieval and transportation of the correct box.
The robot can adjust its end effector height using a linear actuator and can reach deeper inside the bin using its two-link arm structure. Two carts are attached to the robot: the first cart temporarily stores boxes that are not the correct match, while the second cart holds the correct box for transport. The detection process involves removing boxes one at a time—from top to bottom and front to back—until a camera scans the correct AR tag and retrieves the desired box.
How we built it
We built the robot in three phases: design, mechanical structure assembly, and electrical assembly. We began by ideating a design for the robot, simplifying the problem by assuming that the location of the target box was known and removing boxes one layer at a time. We decided to use mecanum wheels to allow precise movement to the desired location, where the arm could be linearly actuated to the correct height, and the end effector could use a suction mechanism to grip the box.
Grendel worked on developing the mechanical design of the arm, utilizing a two-link structure for grabbing objects. He also designed an enclosure to mount the linear actuator onto the chassis of the robot.
For the electrical assembly, we connected the motors to two motor drivers, which were then interfaced with an Arduino for motion control. The DC motors were powered using 9V batteries as a substitute for a dedicated battery pack. Adarsh developed the electrical circuitry for the robot.
Rahul and Nihit worked on creating firmware to control the robot. Their goal was to enable a Raspberry Pi to control the actuators. Teleoperation functionality would be implemented using a Flask server hosted on the Pi, allowing the user to send commands via HTTP POST requests. The next stage of development would involve integrating a camera for object sensing.
Challenges we ran into
We had to ensure that the dimensions of the robot were small enough to fit in the narrow aisles. This narrow clearance also posed a challenge for the robot's locomotion. We used a mecanum wheel drive to make the robot more dexterous in tight spaces.
The second challenge was picking up a package when it was placed deep inside the bin and possibly occluded. We came up with a unique solution: attaching two temporary storage containers to the robot to move other packages out of the way and retrieve the desired package from the bin.
Accomplishments that we're proud of
We are proud of the design we developed for picking a box from a random stack in the bin. Despite the limited time, the mechanical prototype we constructed effectively demonstrates the robot's capabilities, showcasing the potential for its introduction in Amazon warehouses.
What we learned
We learned how to quickly iterate on ideas and solve problems as a team. Although it was initially difficult to communicate ideas with team members, it became easier as we collaborated more. It was also eye-opening to gain insights from other like-minded people and observe the approaches taken by other teams in the hackathon. Additionally, we reinforced our understanding of fundamental electronics and circuitry concepts while prototyping the robot.
What's next for FBots
With components like battery packs, motor drivers, and a Raspberry Pi, we plan to complete the development of the robot's firmware and eventually create a working demonstration with actual boxes. The arm structure will need to be rebuilt after returning the hackathon parts, but the robot can be redesigned using spare components and materials available at the campus makerspaces.


Log in or sign up for Devpost to join the conversation.