Inspiration
Inspired by the work of plantvillage.psu.edu and iita.org, we wanted to build an Arduino-based autonomous robot that can move in a farm environment without damaging existing plants or soil and use object detection to find crops and categorize them as diseased or healthy.
What it does
It is a disease detection robot that autonomously moves around farms and reports the location of diseased plants.
How we built it
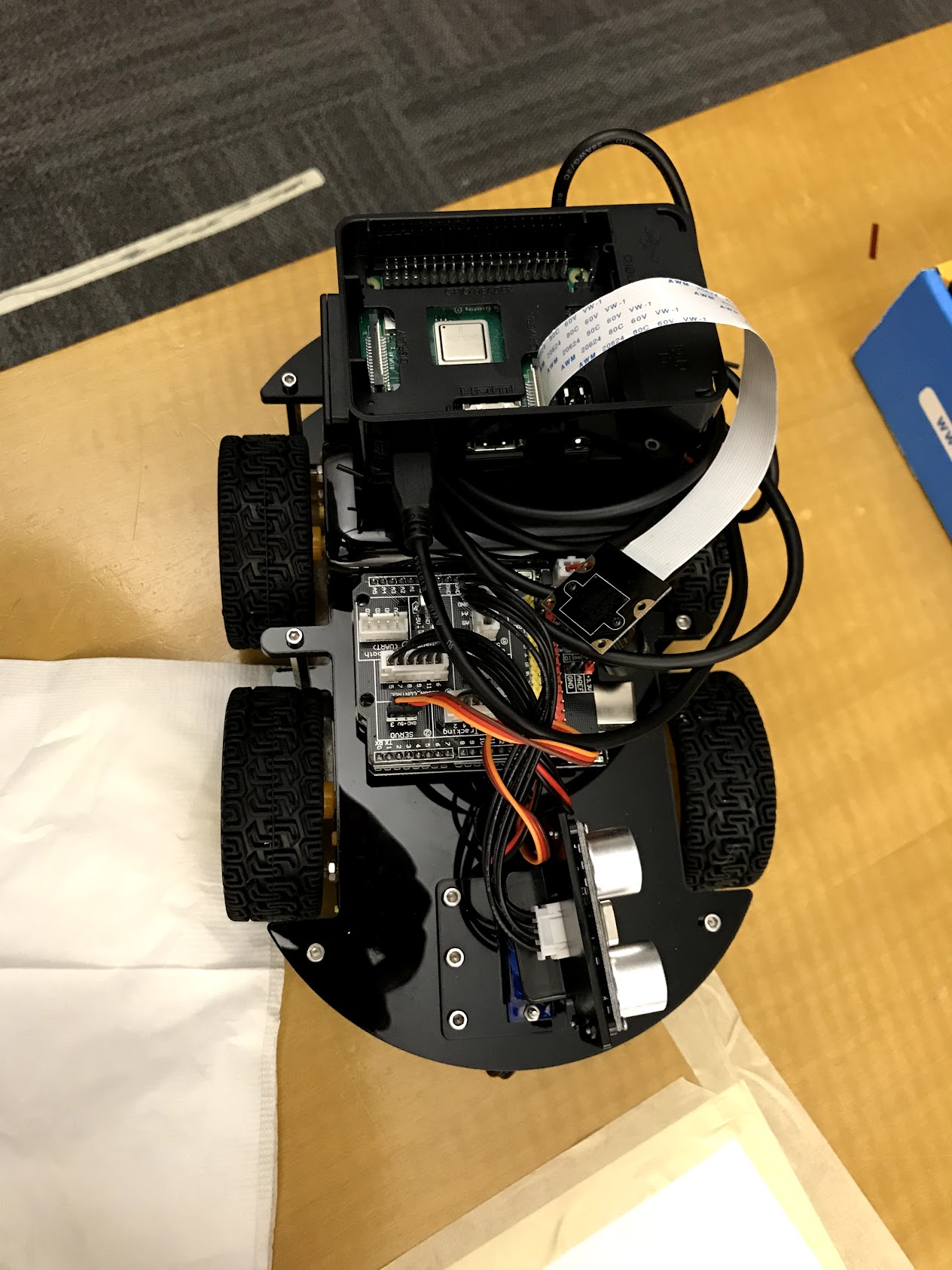
I used the Smart Bot 3.0 kit, raspberry-pi for image streaming. The network camera is connected to the raspberry-pi, which in turn is connected to a mobile hotspot. The laptop is connected to the same hotspot. This allows for the network camera to stream to the computer. Then, we run the stream through a convolutional neural network based on mobilenet SSD (built on TensorFlow) and do the plant classification and identification in real-time. Then, we transmitted the stream through a network port to a Wix website through a desktop encoder (OBS).
Challenges we ran into
Continuous live streaming from the raspberry-pi on to a Wix website was difficult at first. However, we were able to look at some of the in-depth documentation and figure out how to stream it through an encoder. Earlier, we tried using Google Vision and Video Intelligence API. However, due to network connectivity issues (as a lot of students were on the network at the venue), the program would crash. Eventually, we ended up replacing it with a pre-trained neural network from GitHub. We also wanted to map a crop field in a matrix. Changing the matrix representation dynamically and then adding it to the Wix platform was challenging too, especially since we got to that part later during the project.
Accomplishments that we're proud of
- We used a robotic kit for the first time and were able to assemble it and get it running fairly quickly.
- For some of our teammates, it was the first time learning JS. By the end of the project, each of us was more confident in our JS skills than before.
- Learning WIX for the first time and being able to show a live stream on it.
- Taking part in a hackathon for the first time for some of our members.
- The diversity of our group. We are all from different universities (and even different countries) yet we made something useful together.
What we learned
- JS
- Wix
- New libraries in python, especially the google API ones.
- Robotics for some members. Still, first time using the kit for everyone.
- Building on the strengths of each of our teammates.
- Friendship <3
What's next for Farmaid Jr.
Some parts of the control and code will be used for the full version of Farmaid. If this prototype is successful, a larger robot can be designed for autonomous disease detection.


Log in or sign up for Devpost to join the conversation.