🏎️ Inspiration
We live in the pits. As the University Rover Challenge robotics team, we know what it means to build machines that push limits. We wanted to bring that same engineering intensity into simulation and go faster than we ever could on actual terrain.
What it does
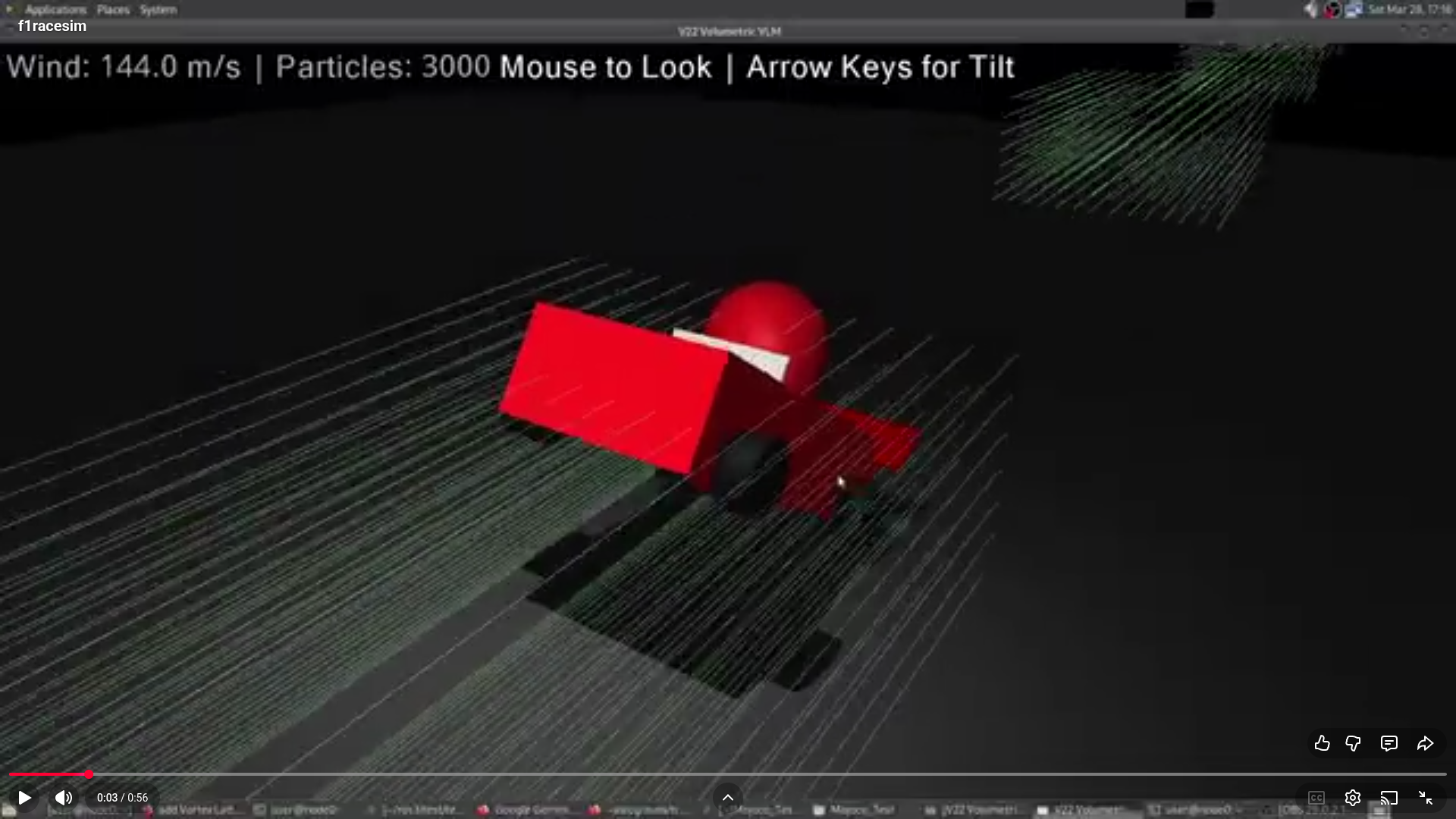
f1RaceSim is a real-time aerodynamics and vehicle physics simulator with full Xbox controller input, built on MuJoCo physics. It renders 3,000+ volumetric particles reacting live to car geometry visualizing wake turbulence, ground effect downforce, and compression zones in motion. You're not watching a replay. You're in the car.
How we built it
Three layers, zero compromises:
Physics core - MuJoCo handles contact dynamics and rigid body simulation. We layered a custom Volumetric Vortex Lattice Method (VLM) on top, computing wake interaction and downforce scaling against dynamic pressure (q_s) every frame.
Aero visualization - Particles shift from red (compression/high-speed) to blue (wake/turbulence) based on local velocity vectors. The wind tunnel is live - you can adjust wind speed and direction mid-run with the right stick.
Control layer - A ROS3 node subscribes to /xbox/controller via the mirage messaging protocol. Left stick steers. Triggers map 0-1 to throttle/brake. Input lag is near-zero. Written in C, compiled with MuJoCo + GLFW3.
Challenges
48 hours is a very short pit window. The hardest problem was getting the VLM particle system to stay in sync with MuJoCo's physics timestep without frame drops - any desync and the aero visualization lies to you.
Accomplishments
A working, playable F1 aerodynamics simulator with ROS3 controller input, running in real-time. The particle system alone took most of Saturday.
What we learned
Box yourself into a project late, and the car will tell you what matters. We cut scope brutally and came out with something tighter and more polished than if we'd started on Day 0 with a grand plan.
What's next for f1RaceSim
The same physics stack is going into our University Rover Challenge platform for real-world vehicle simulation. Airfoil simulation, dynamic pressure scaling, low-latency ROS3 control


Log in or sign up for Devpost to join the conversation.