



After five hours of debating over a topic, Brian–a member of our team–recalled a 2 axis Gimbal machine he once utilized for a maze game. We began thinking about this interesting invention, and were inspired to take it further. We decided to make 3 axis Gimbal because we wanted to do a hardware hack in combination with Virtual Reality (VR).
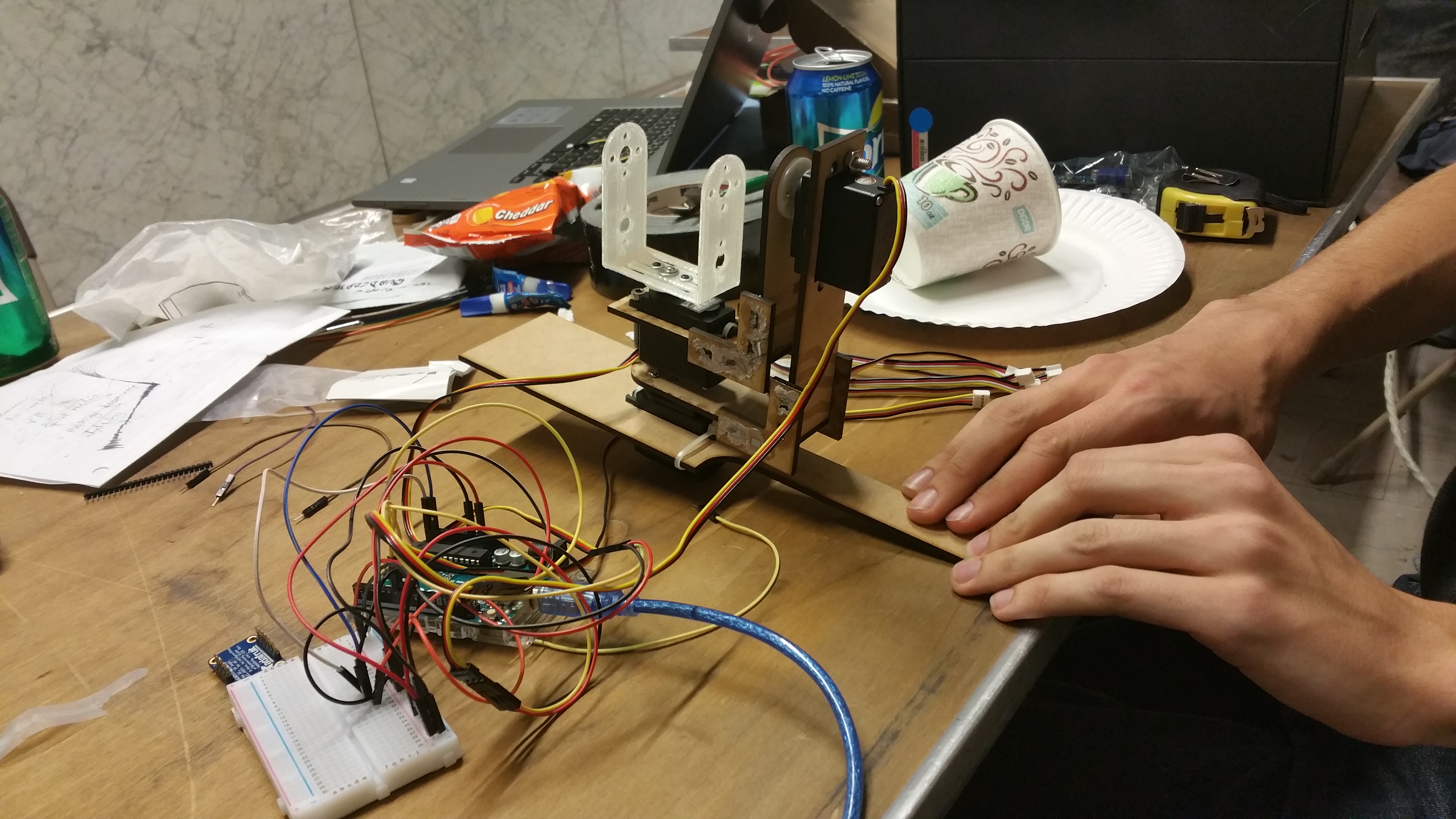
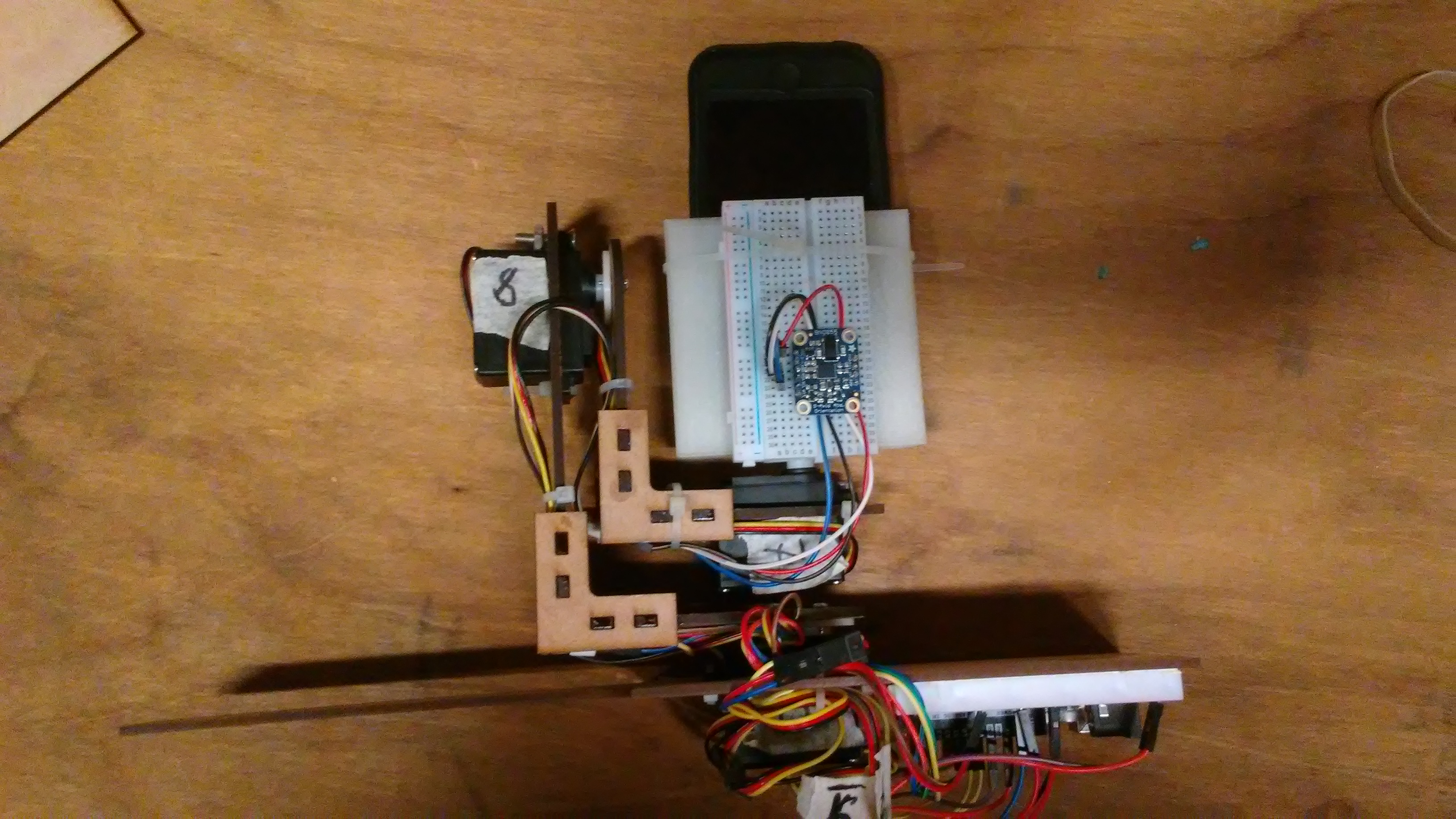
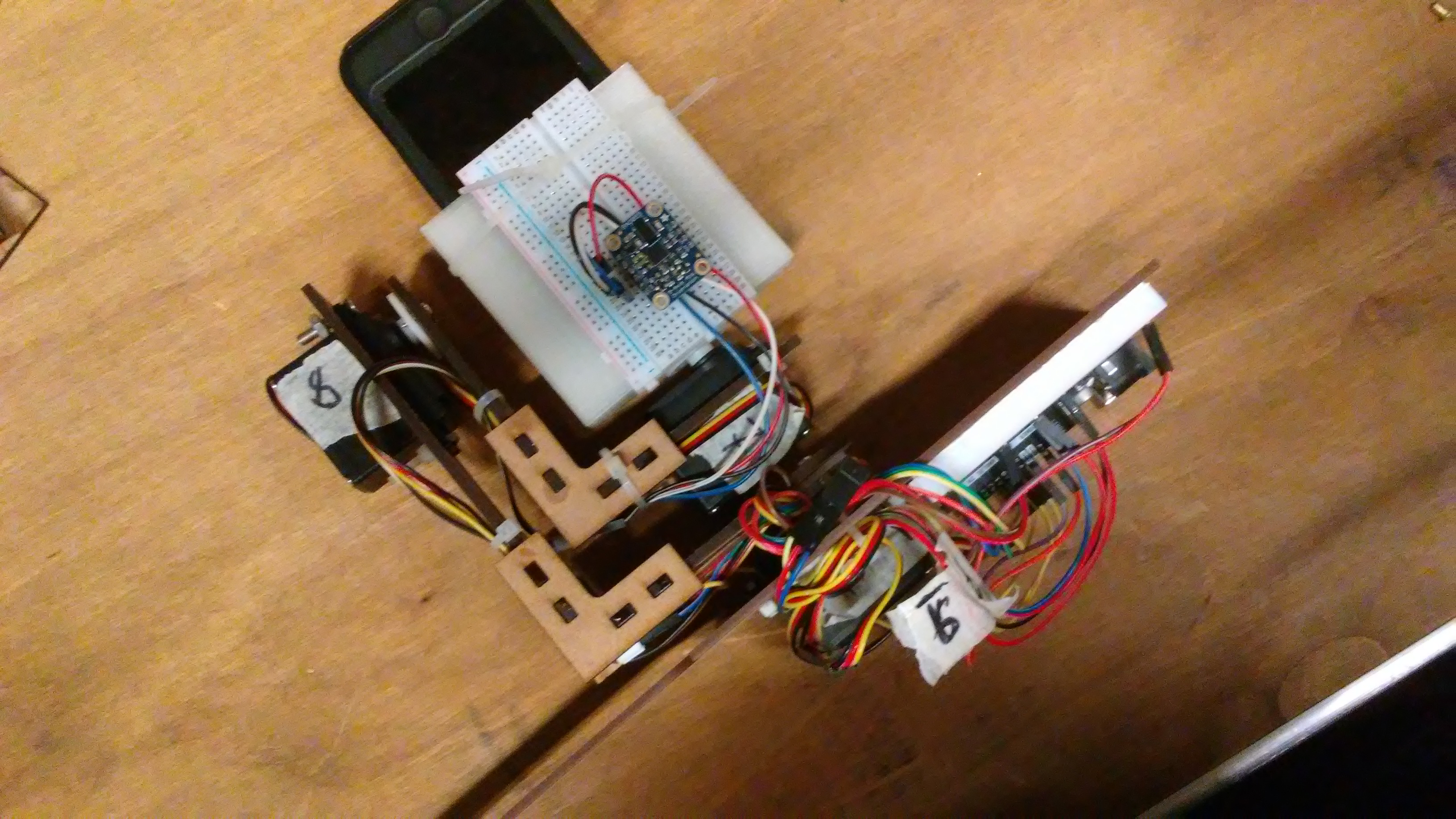
Our project consists of two components: a 3 axis Gimbal to balance a phone, and a module that uses Oculus VR to control the Gimbal from afar. This allows a user to be immersed in their friends and family even if they can not be physically present.
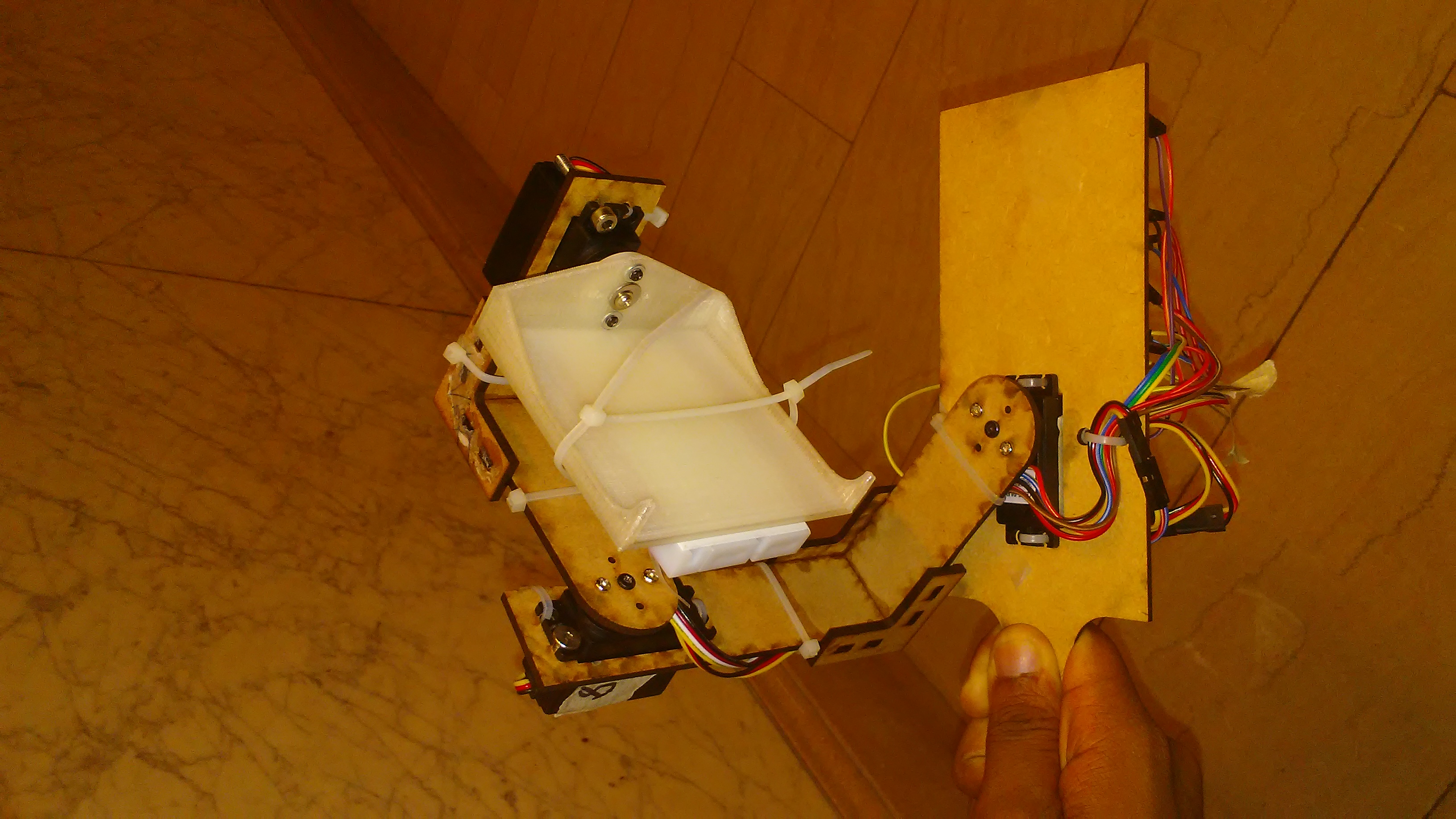
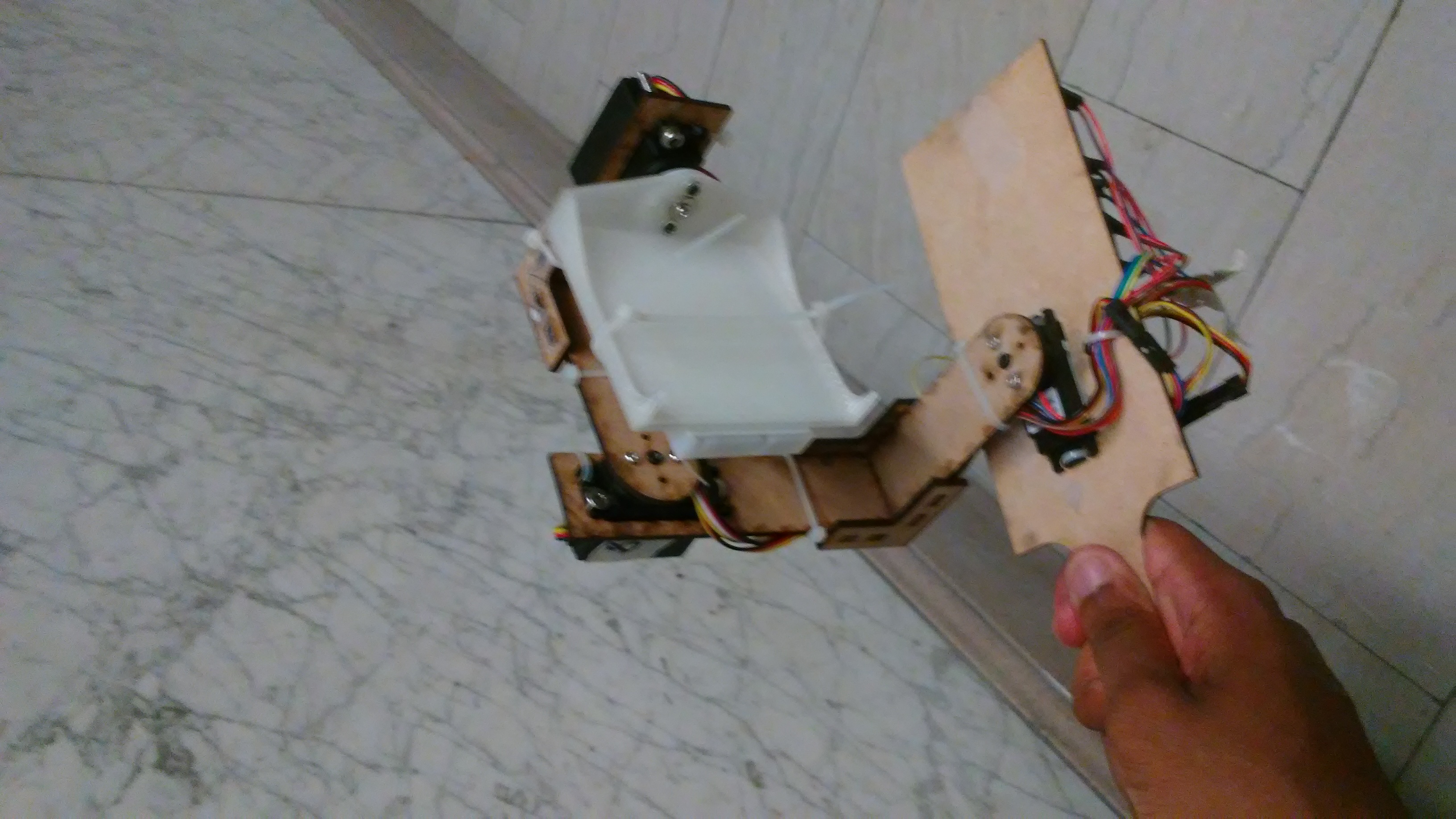
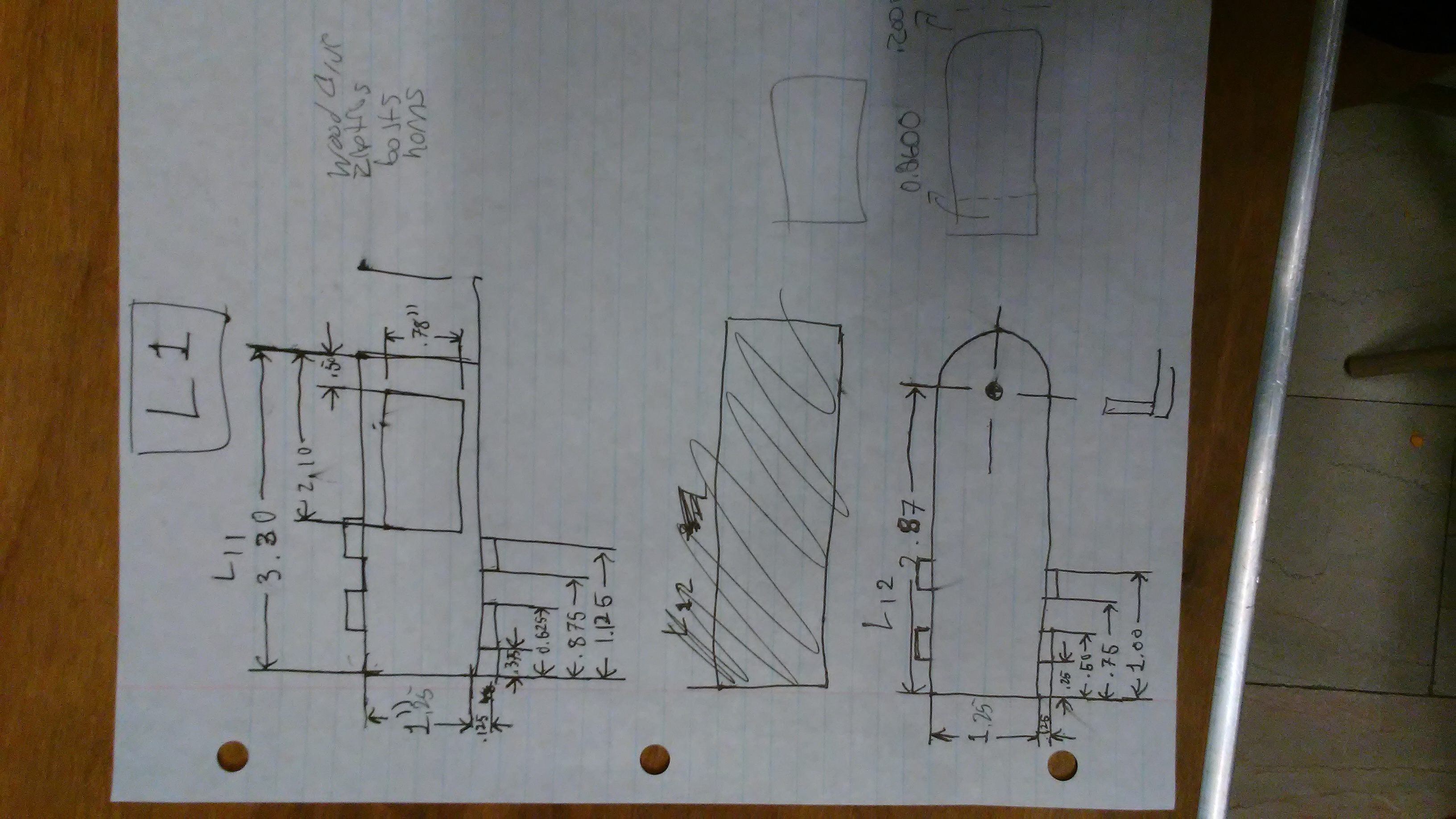
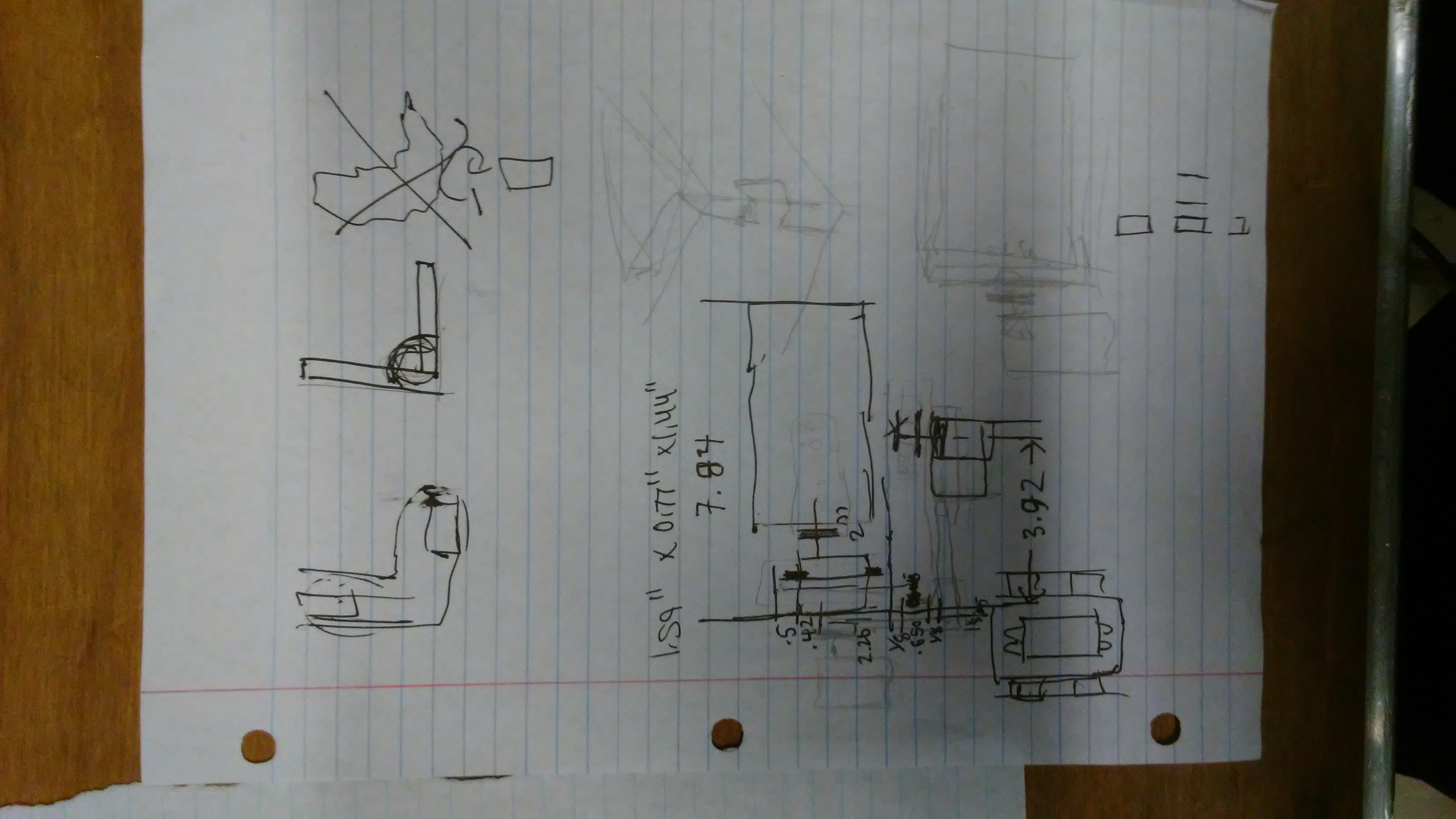
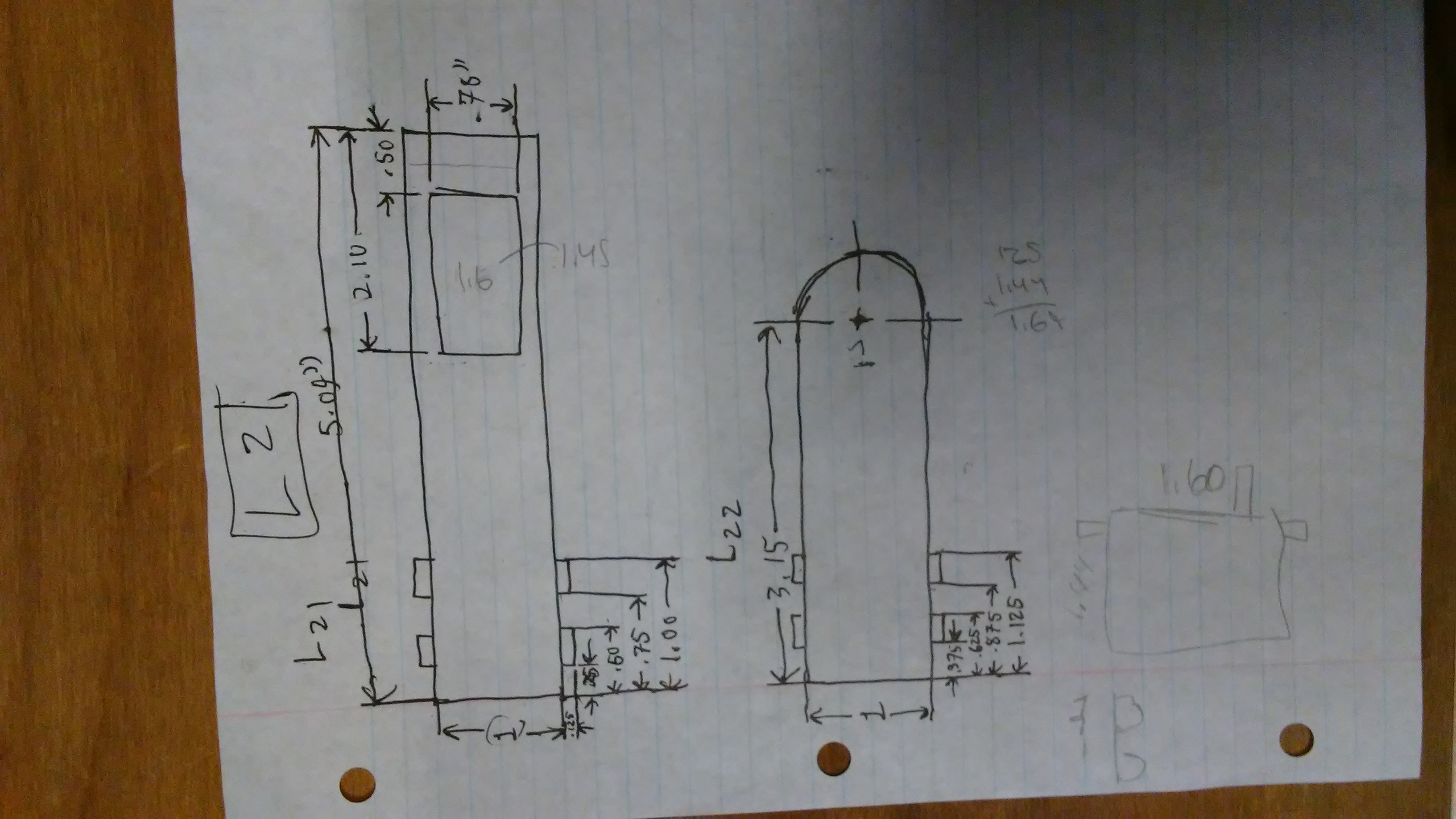
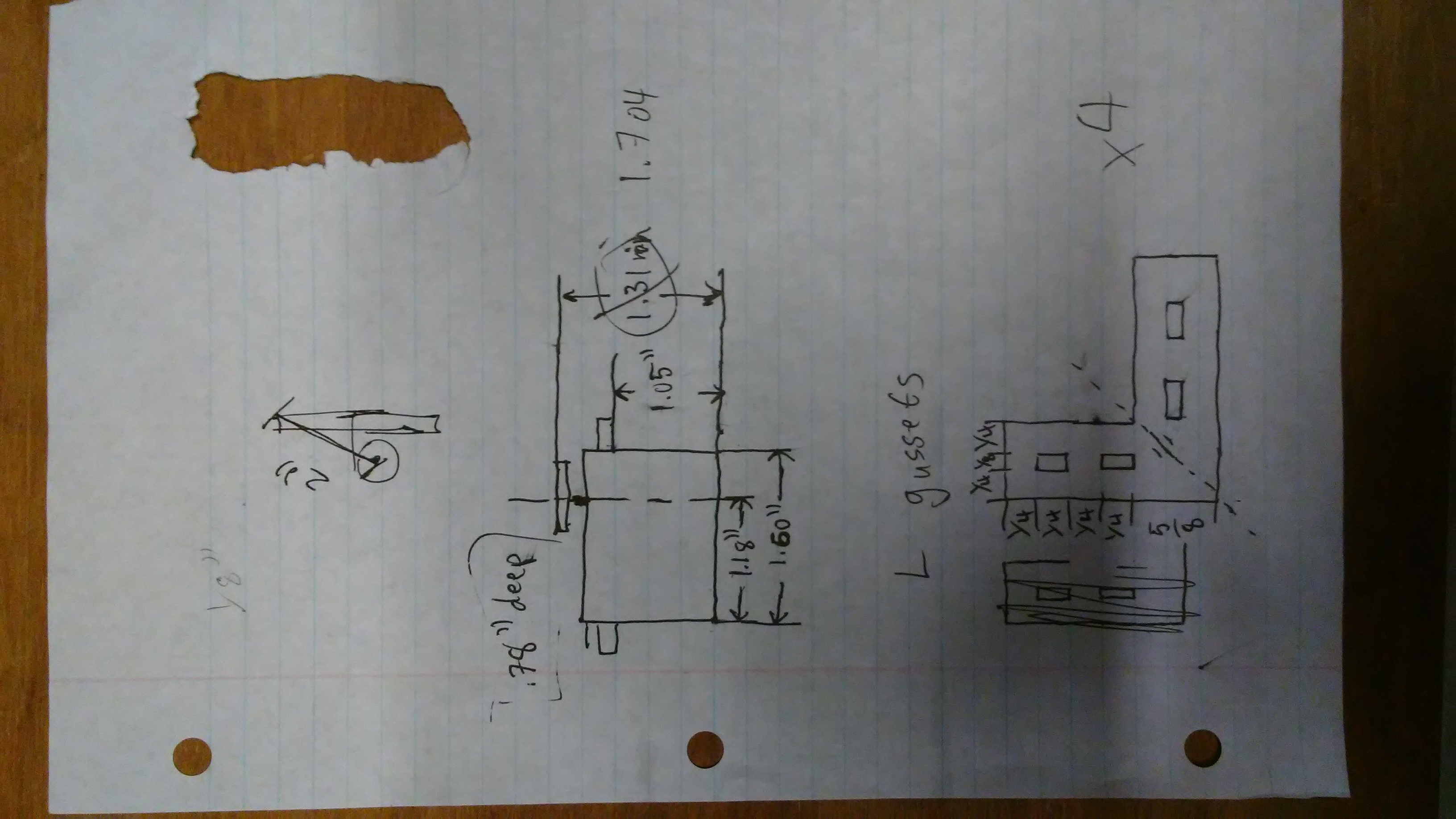
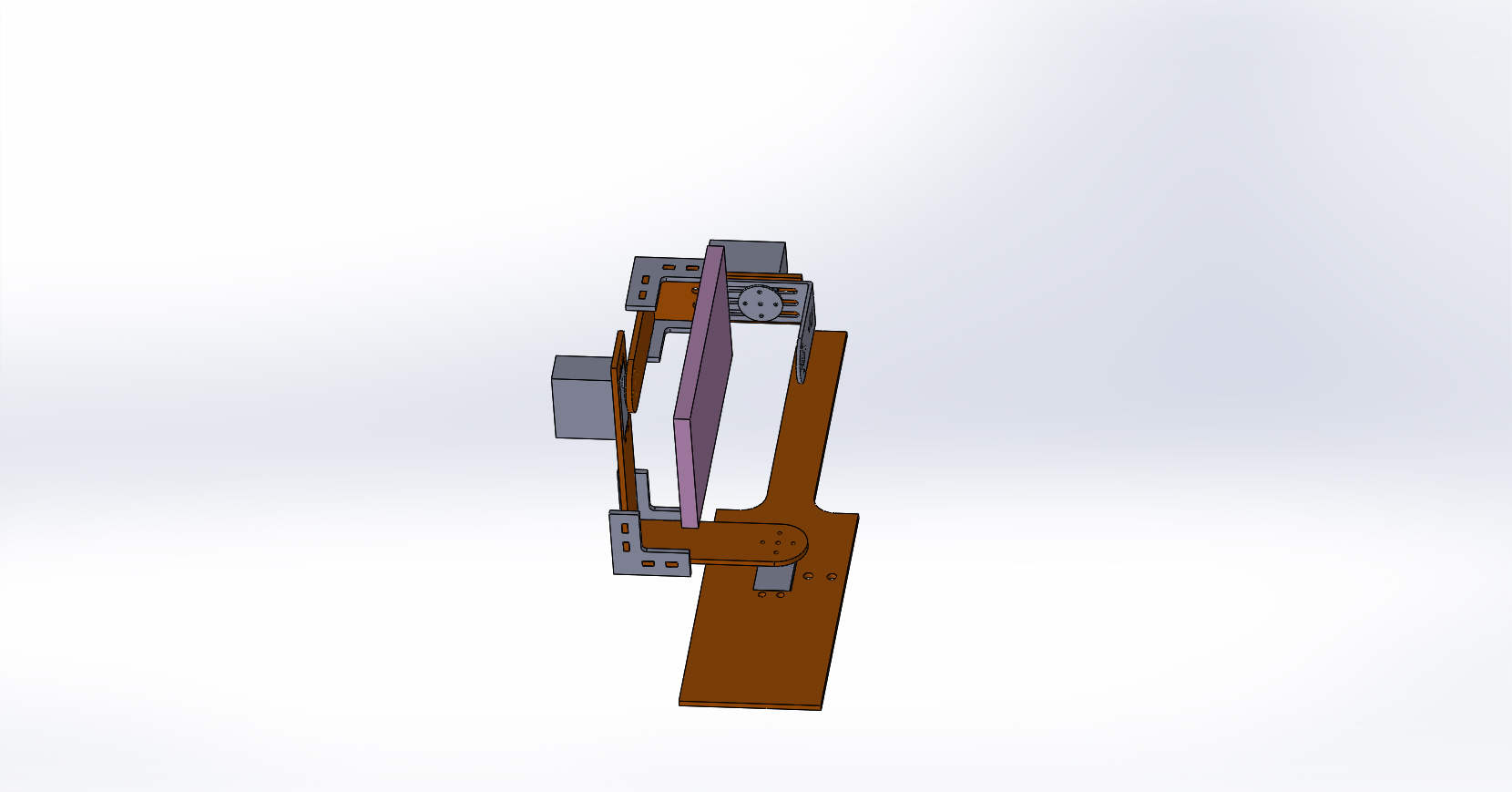
We designed the Gimbal itself in Solidworks, and laser-cut individual pieces before gluing and bolting the components together. We used three continuous rotation servos (one per axis) all powered off an Arduino Uno. these servos were controlled with PID, an IMU, and Inverse Kinematics.
Fabrication and assembly were more challenging than expected. This event being more attuned to hardware, we were restricted to rapid prototyping tools like laser-cutters and 3D-printers, and only the simplest assembly techniques. Additionally, our choice of continuous rotation servos was troublesome as it made it difficult if not impossible to find definite positions for the arms of the Gimbal. In fact, later into the build we realized that due to Whitney's theorem there must be multiple solutions for our Gimbal, making the problem difficult. However, despite the difficulties, we built a fully functional Gimbal, and connected it to VR.
We learned a lot about our CAD skills and where we need to improve, rapid prototyping techniques, sensor integration to mechanical assembly, and just working as a team
Built With
- 3dprinting
- arduino
- imu
- laser-cutting
- oculus-gear-vr
- pid




Log in or sign up for Devpost to join the conversation.