
Inspiration
Actual LiDAR. We have been informed that it is not correct to call it our original project name as we are not using a laser, and the IR Sensor works by measuring the signal strength of the reflection, not the time taken for the reflection to be received.
What it does
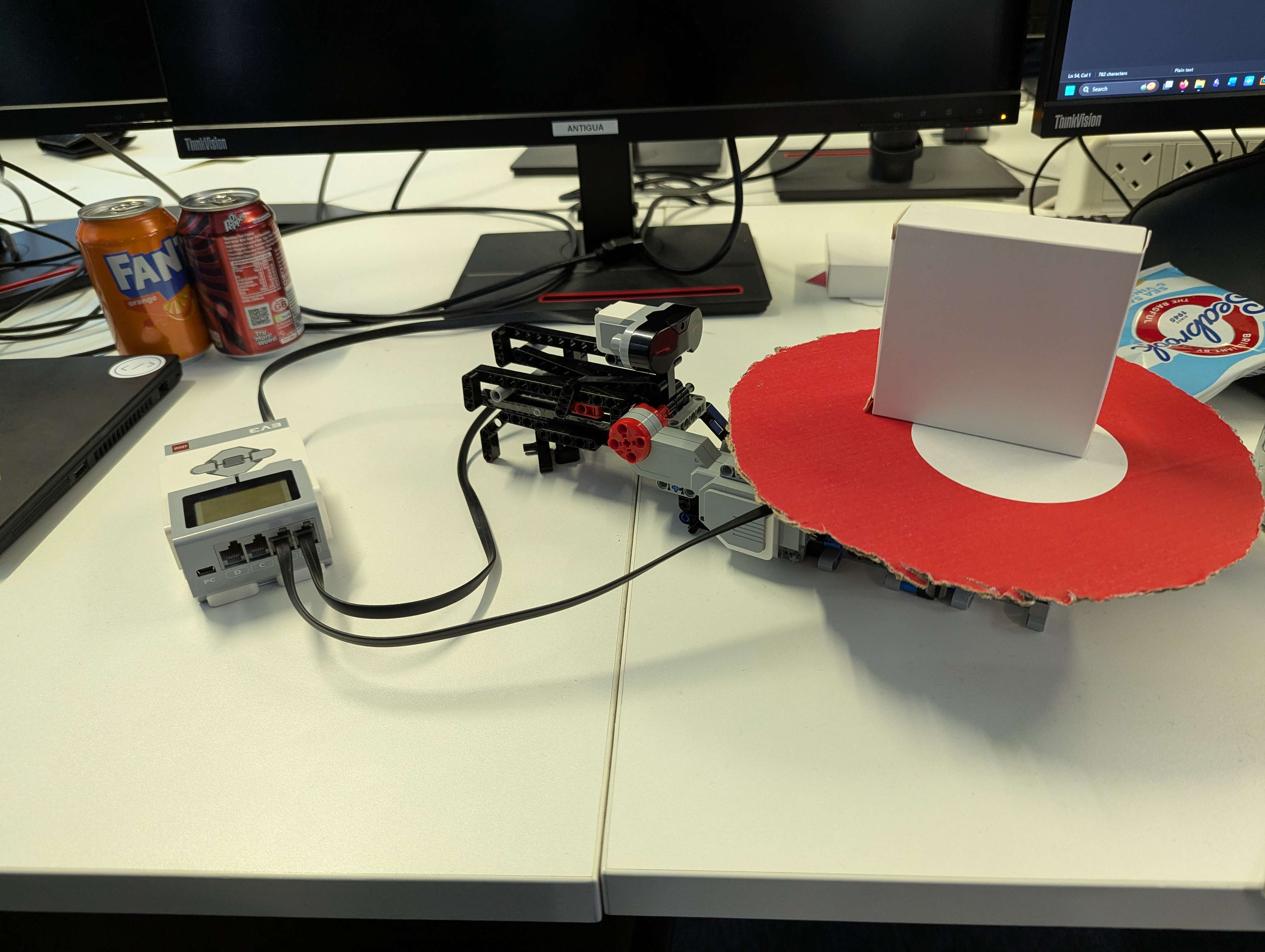
An object is placed on the turntable and it is rotated as an IR scanner estimates the distance from it to the object and uses this to find a coordinate. This creates a file on the EV3, which is run through a converter on a normal machine to turn it into a .obj file for blender usage.
How we built it
We did this using a Lego EV3 running EV3dev with the matching Infrared Sensor. The whole project was written in Python using VScode. The Infrared sensor can estimate distance via an inbuilt mode. Bartosz wrote code to read the data from this to give us a relative distance from the centre. (sensors.py) The object being scanned is rotated on a turntable that is controlled by one of the two motors. The other motor is used to control the height of the sensor, which allows us to scan the whole object in slices. The code to do this (motors.py) was written by Louise, and the physical structures that allow for this were made by Sam. The data being output at this point was three data points; the distance, the rotation of the object, and the rotation of the motor containing the height. This needed to be converted into distances, the code of which was again written by Bartosz. (sensors.py) Alex/Eris wrote the code to take the coordinate data from a file provided by the above program, and convert it into a 3D model in a format which could be visualised in Blender. He also managed the GitHub Repository and assisted with issues regarding Git. (/Data Visualisation)
Challenges we ran into
Limitations of the capabilities and sensitivity of the hardware - The IR scanner is not exactly reliable, anything from a change in colour to background objects can result in interference and inaccuracies. Learning how to coordinate using GitHub - On top of it being all of our members' first Hackathon, this was also our first collaborative project. We didn't know how collaborating would work at first, but the division of labour was effective and efficient.
Accomplishments that we're proud of
The Physical Mechanism was really well done (Congrats Sam) and Alex's code to form the .obj file works, it's just the sensor being weird.
What we learned
- The basics of collaborating using Git - This was really good to learn and is likely to be incredibly useful in the future.
- Oftentimes hardware is the weakest link - Despite most of our code being theoretically sound, the actual results produced are tainted by the low-quality results from the IR Sensor. ## What's next for EV3-LieDAR EV3-LieDAR will likely be disassembled and the pizza-box turntable placed in the bin. It has served its purpose to us and will be disposed of safely.
Built With
- ev3
- ev3dev
- python




Log in or sign up for Devpost to join the conversation.