-
-
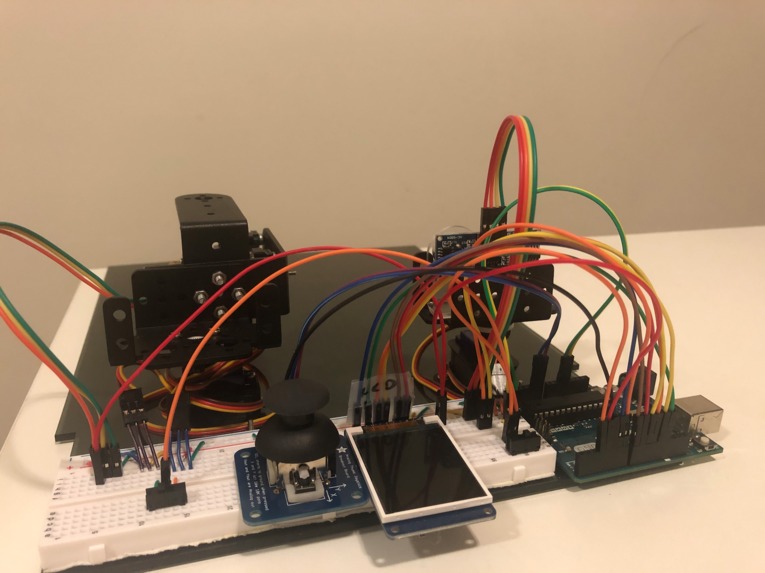
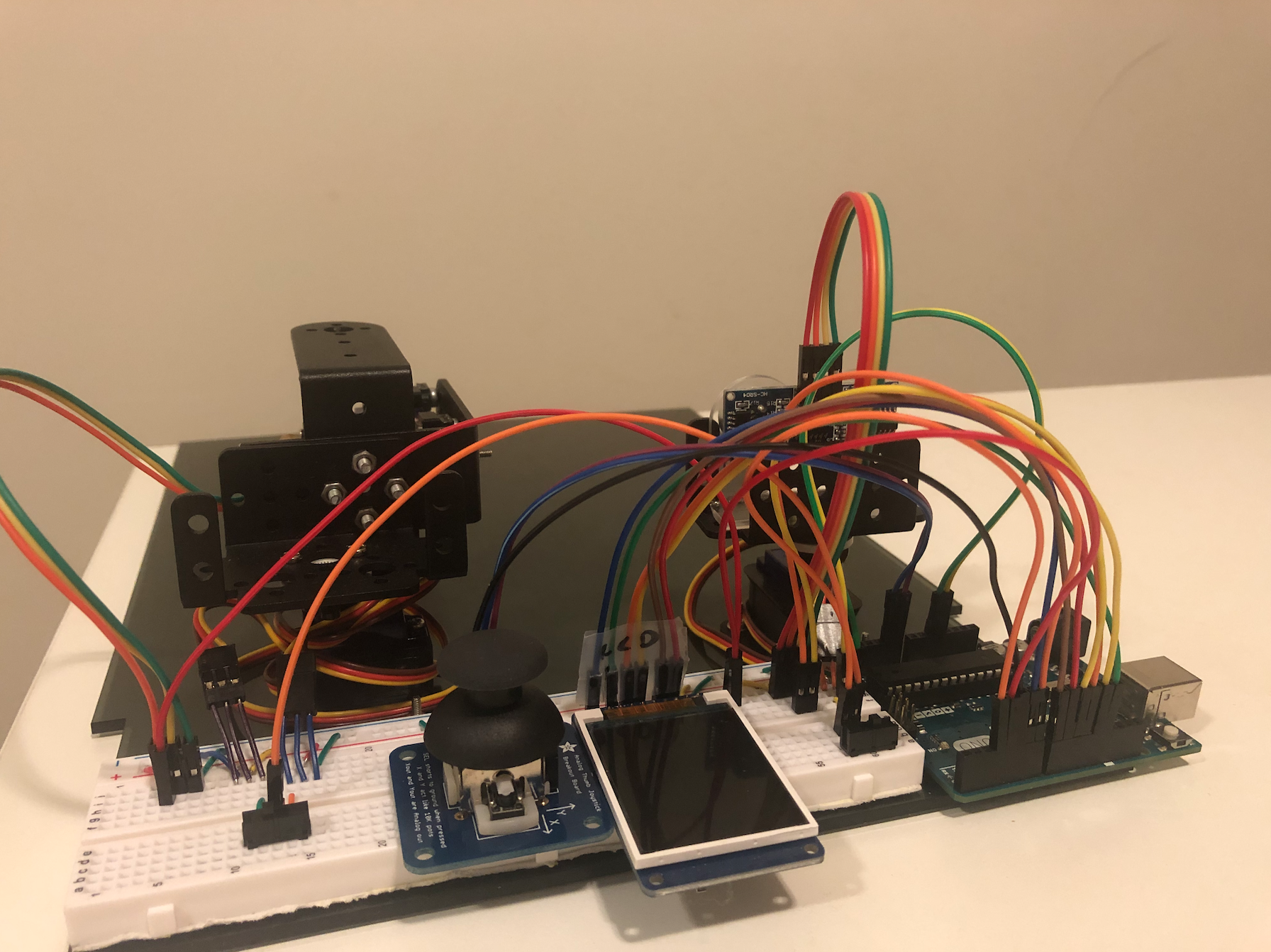
Back
-
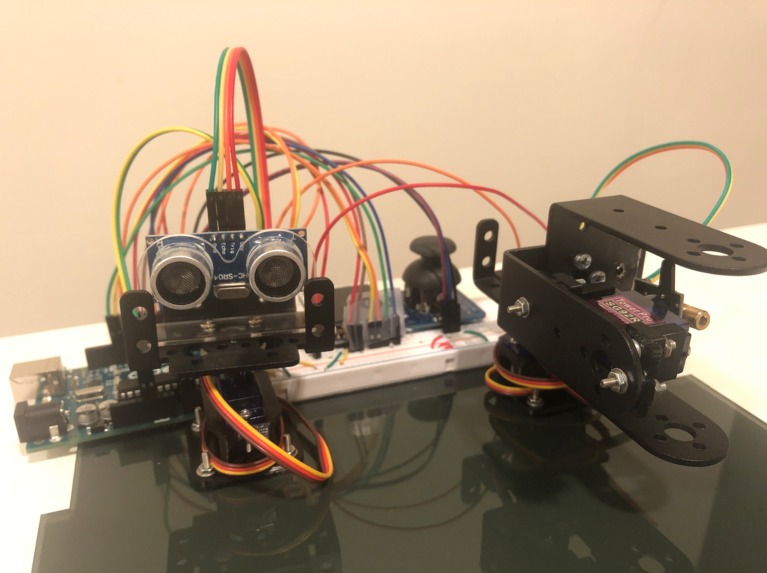
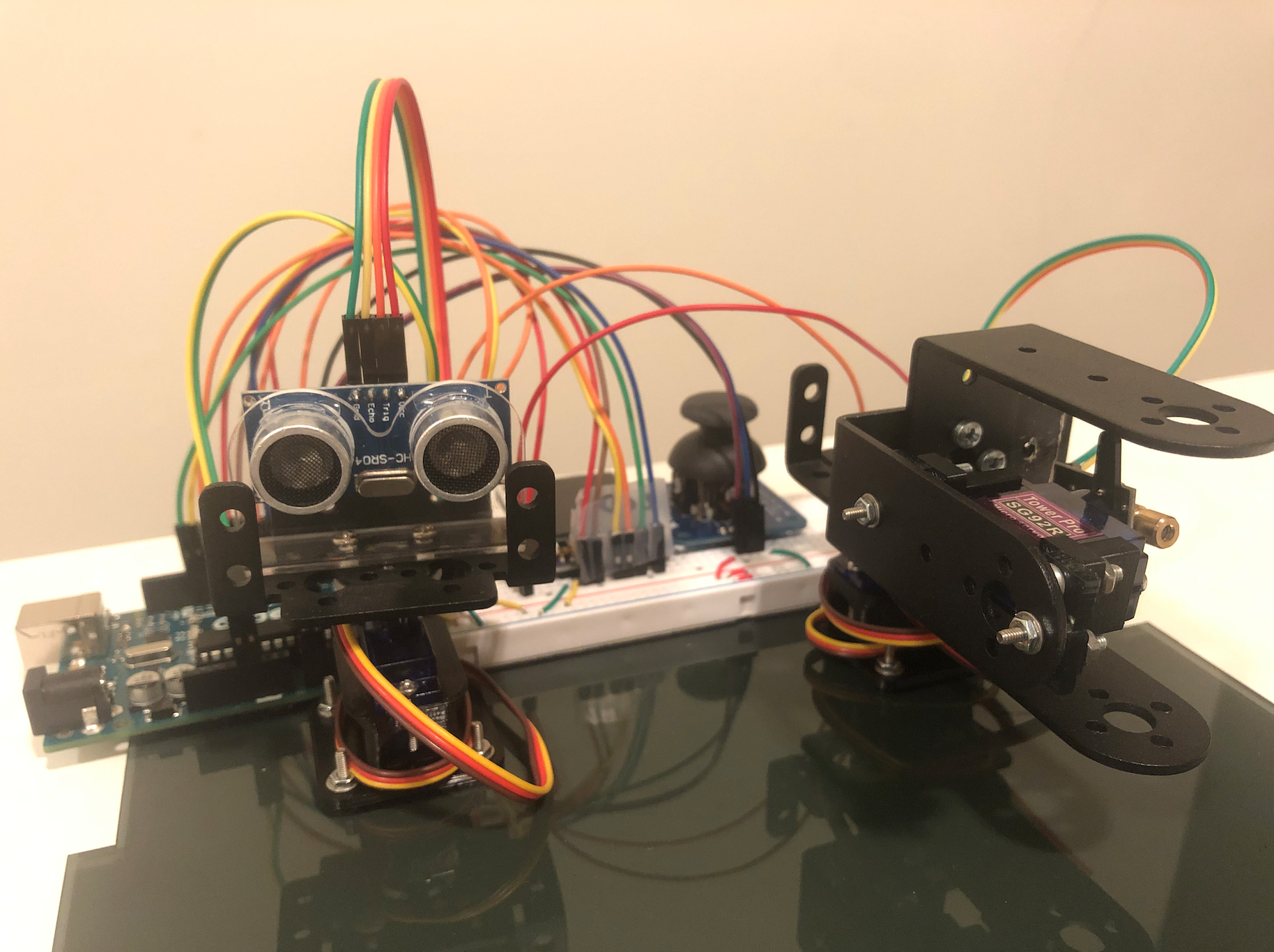
Front
-
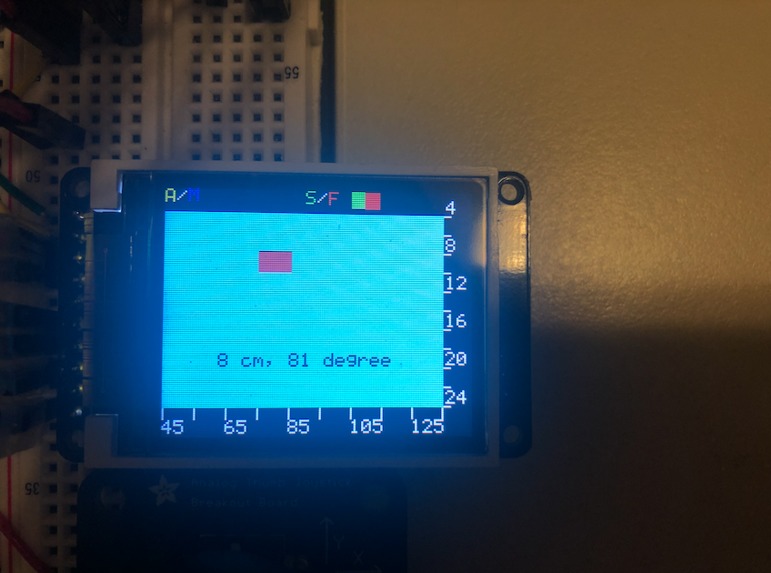
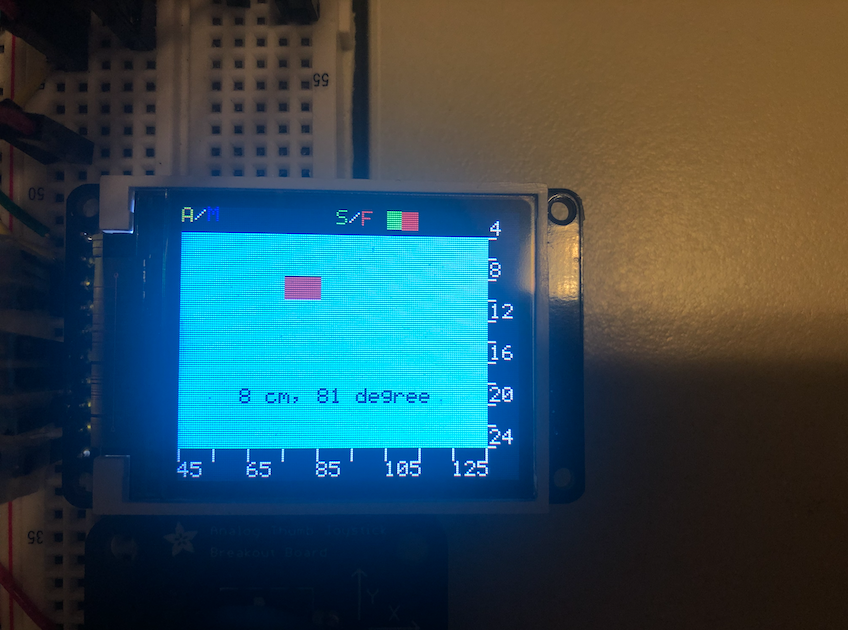
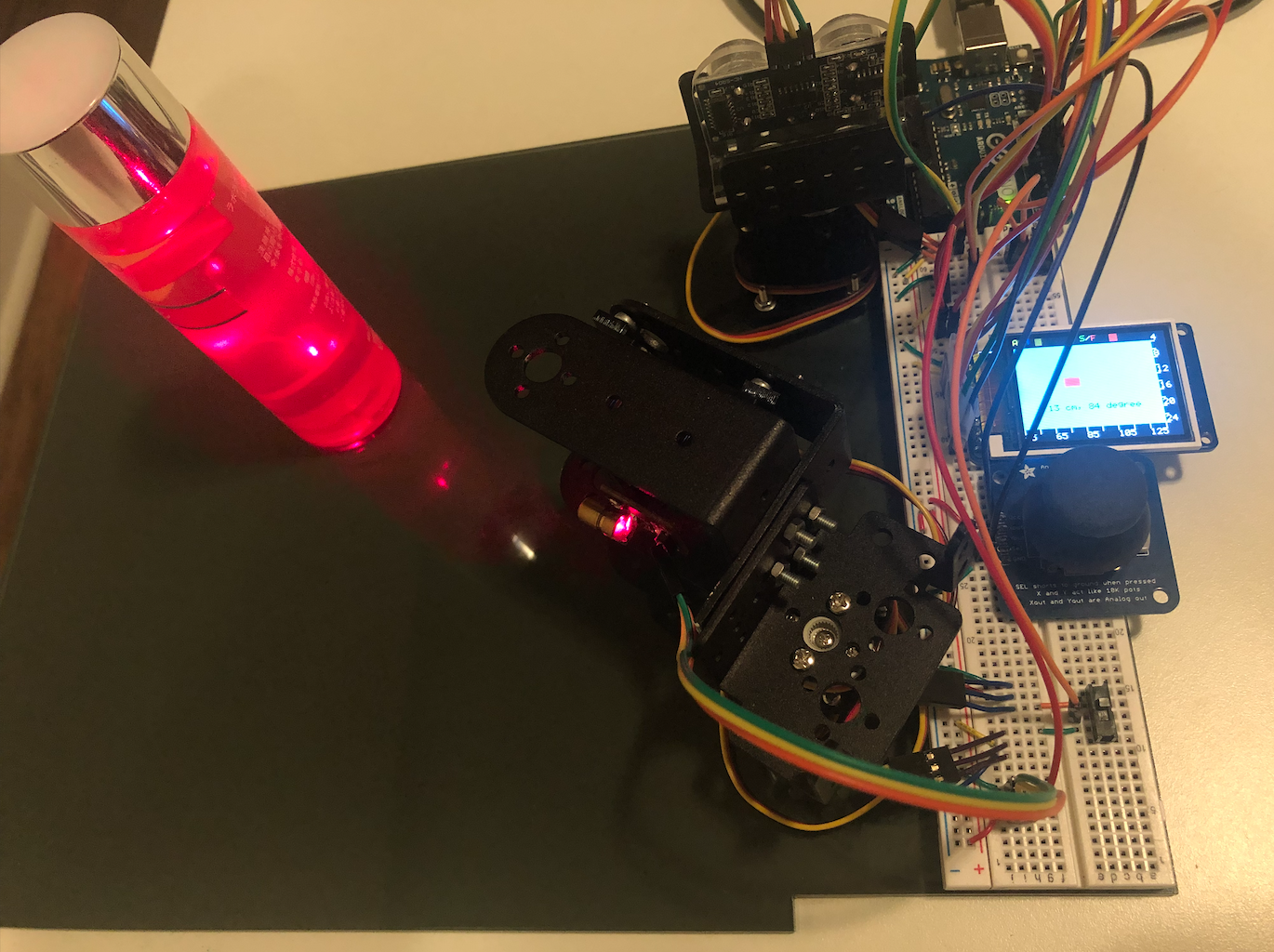
User Interface (computed target info)
-
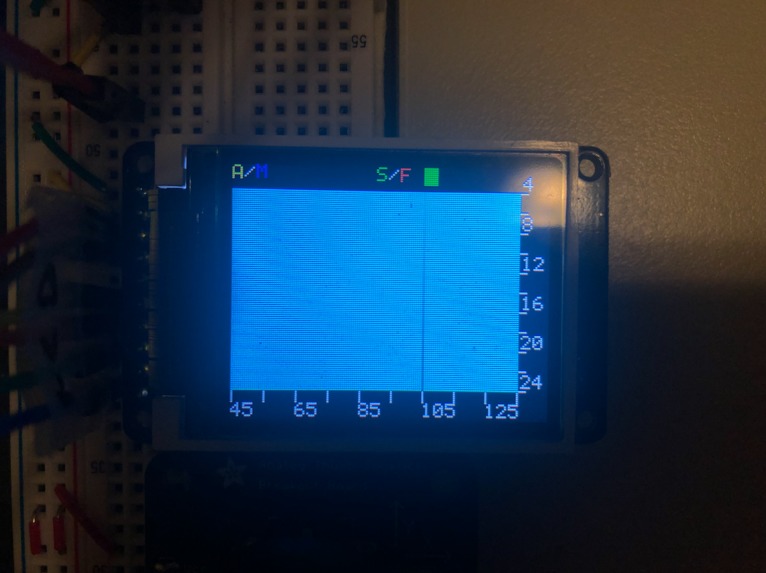
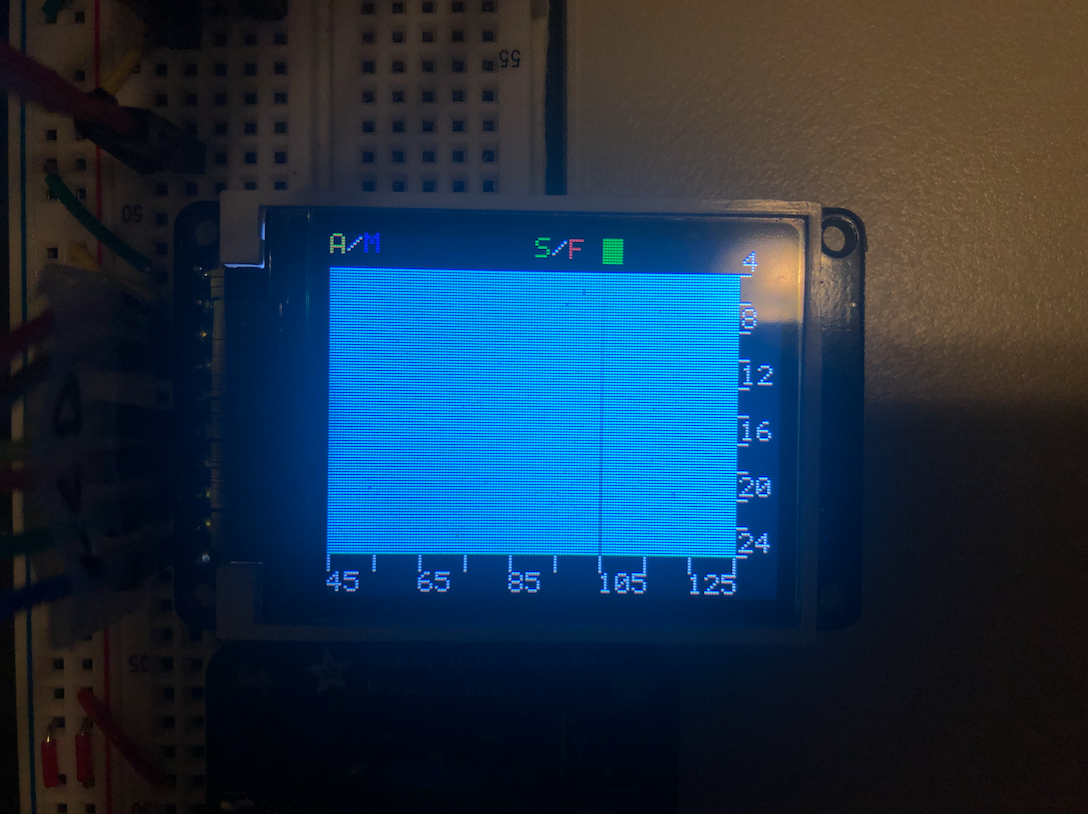
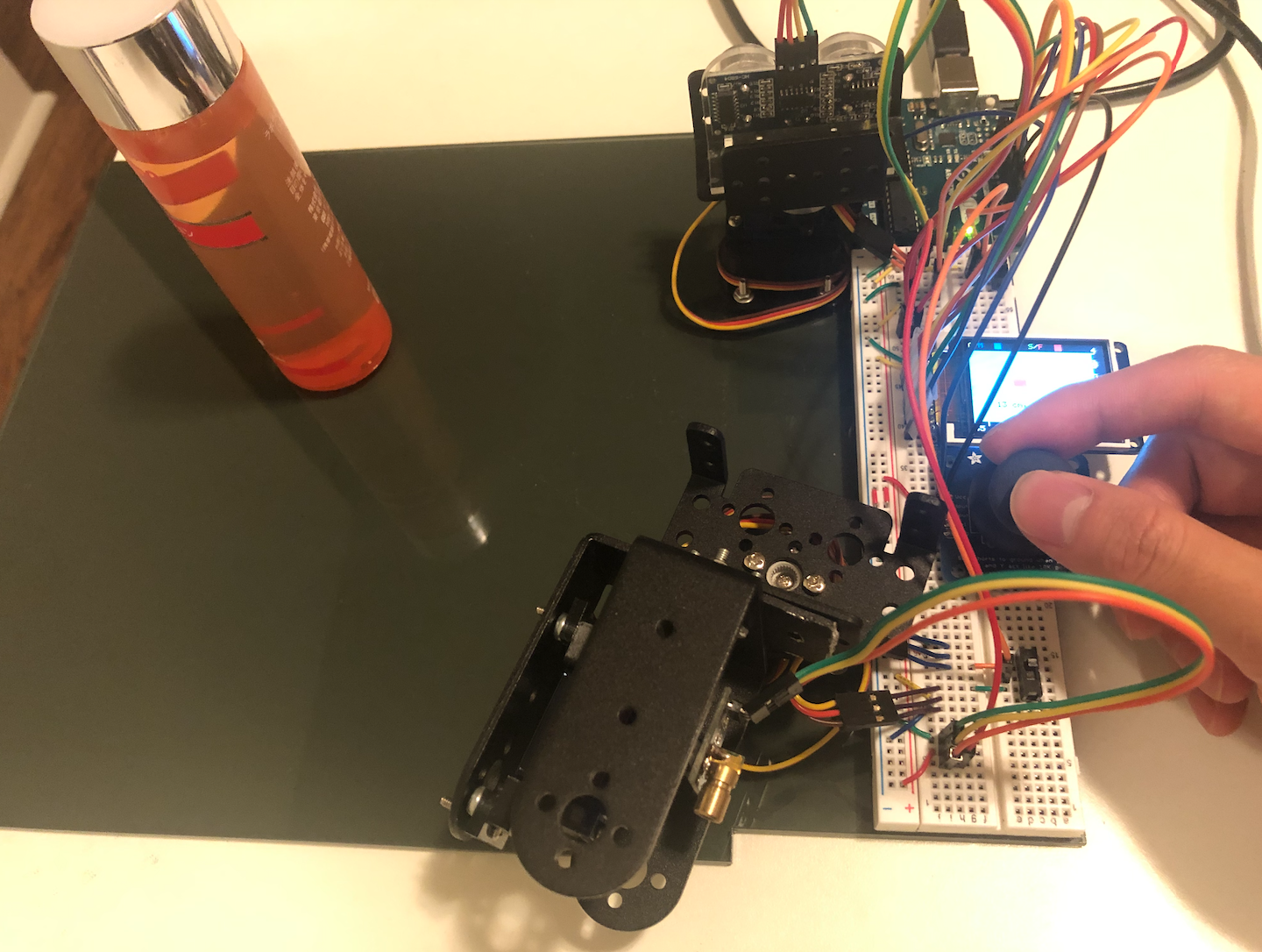
User Interface (no target spotted)
-
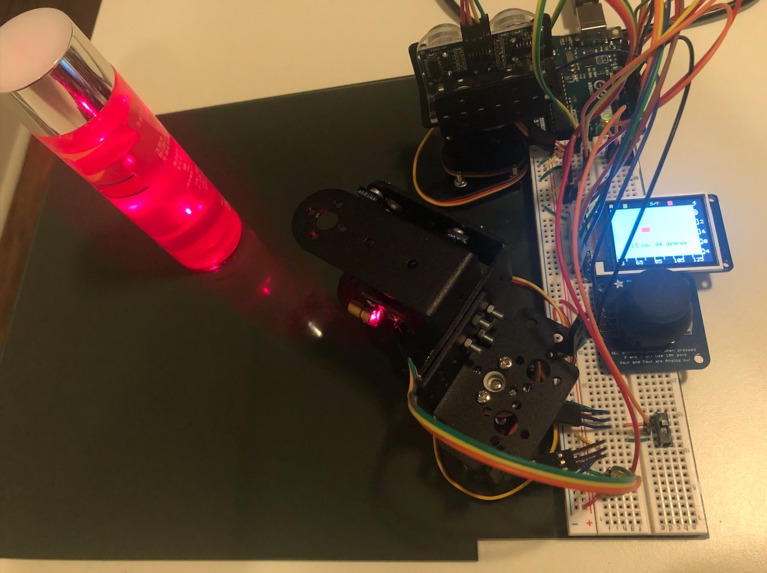
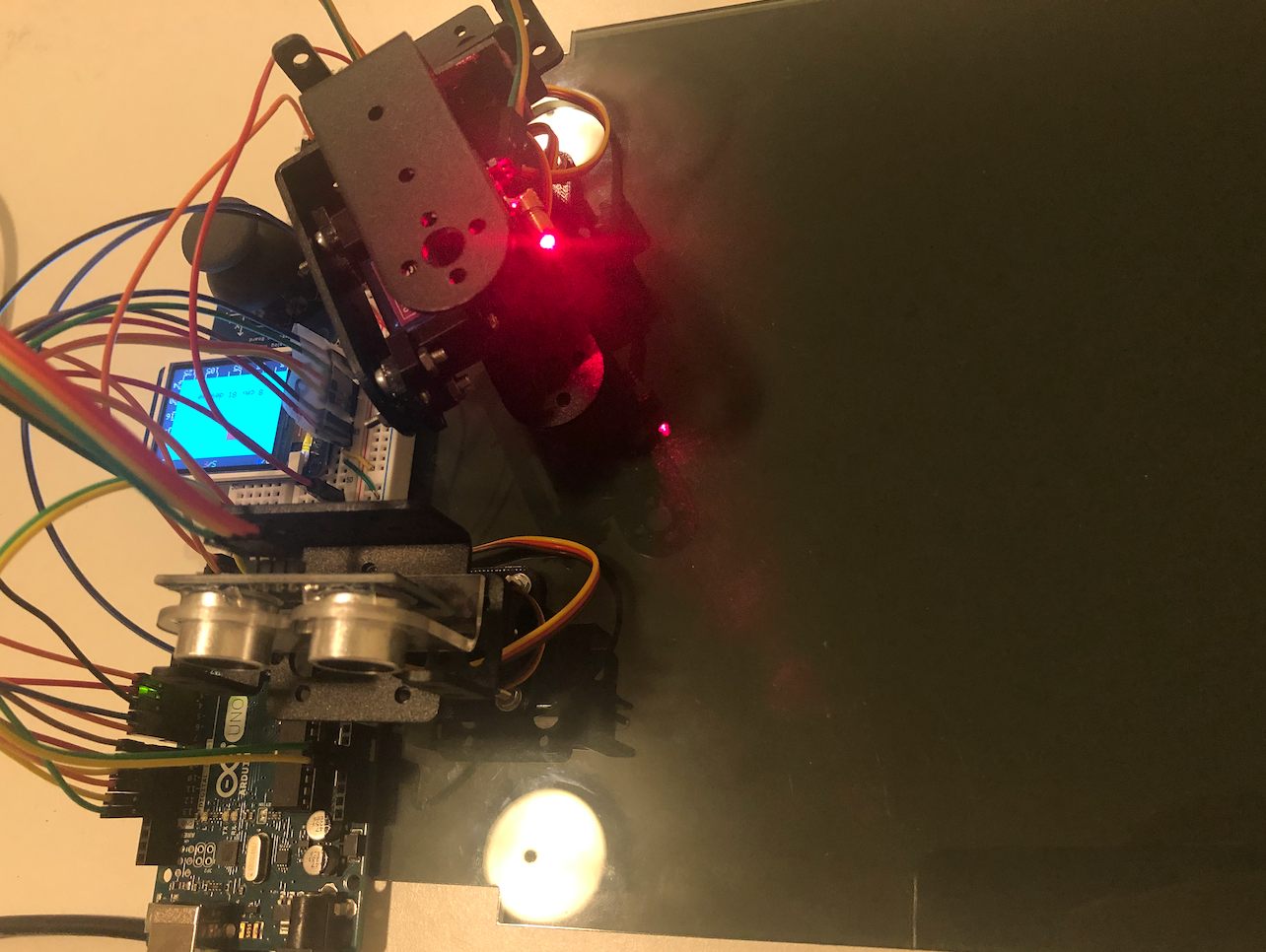
Laser Turret Highlight
-
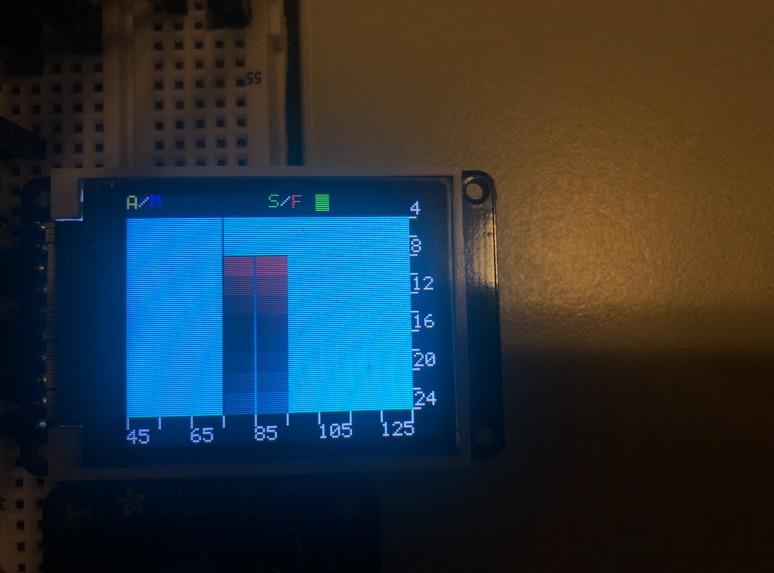
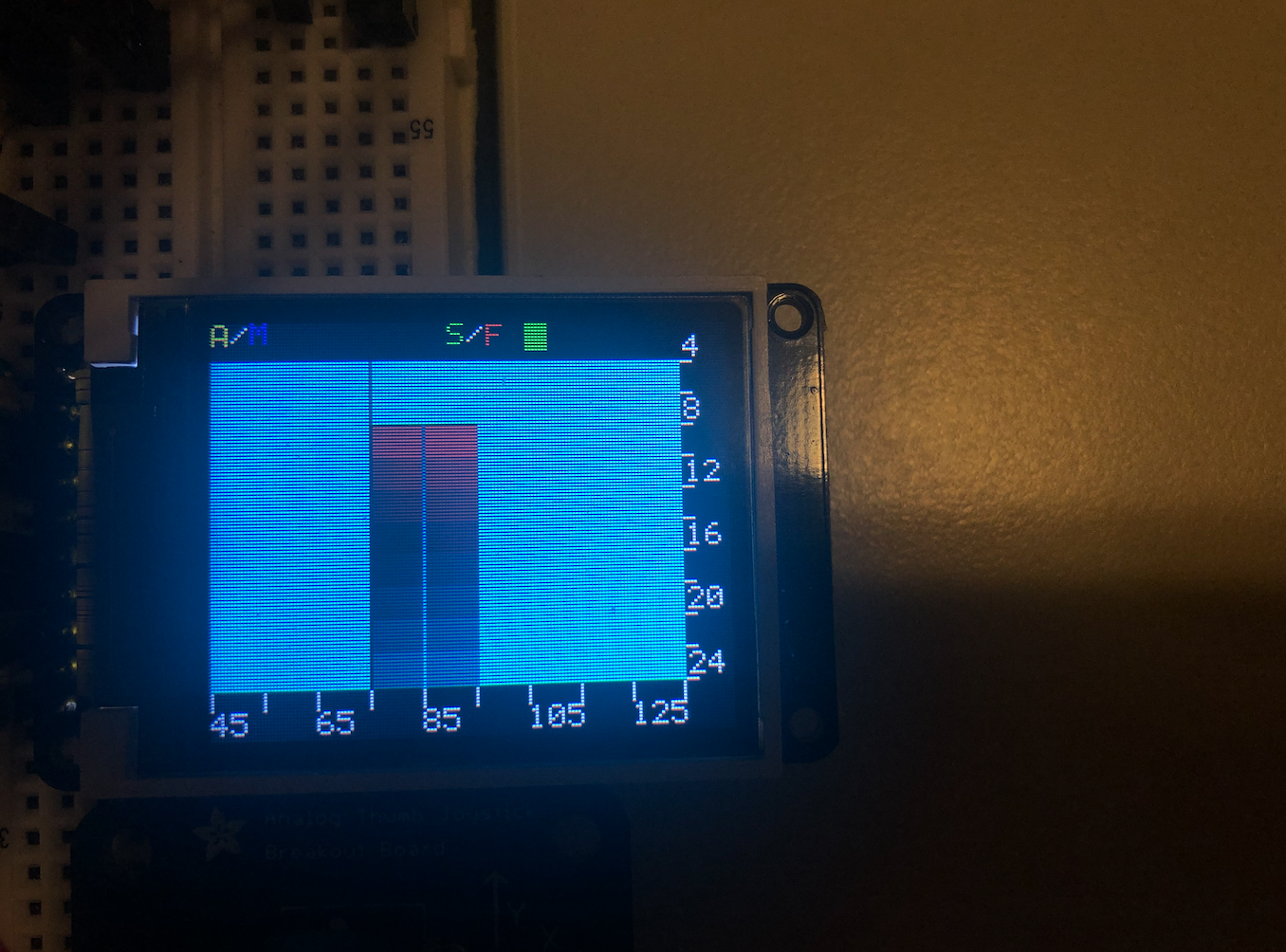
User Interface (closed target spotted)
-
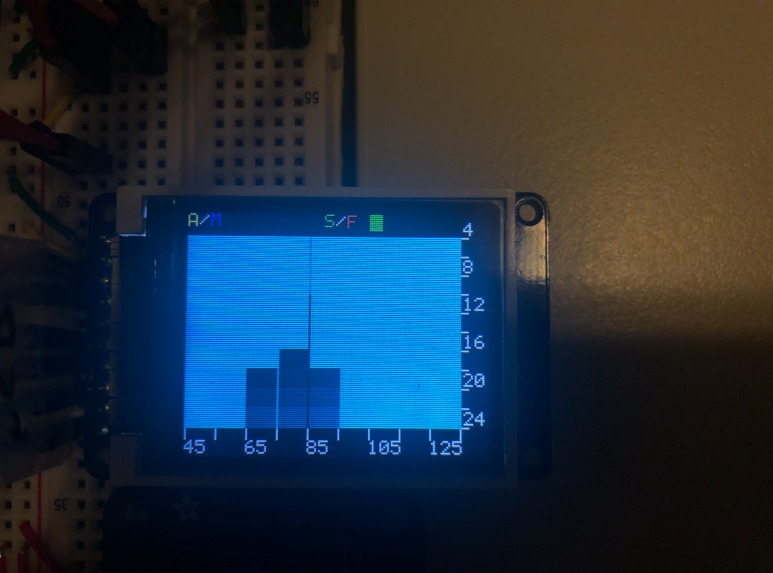
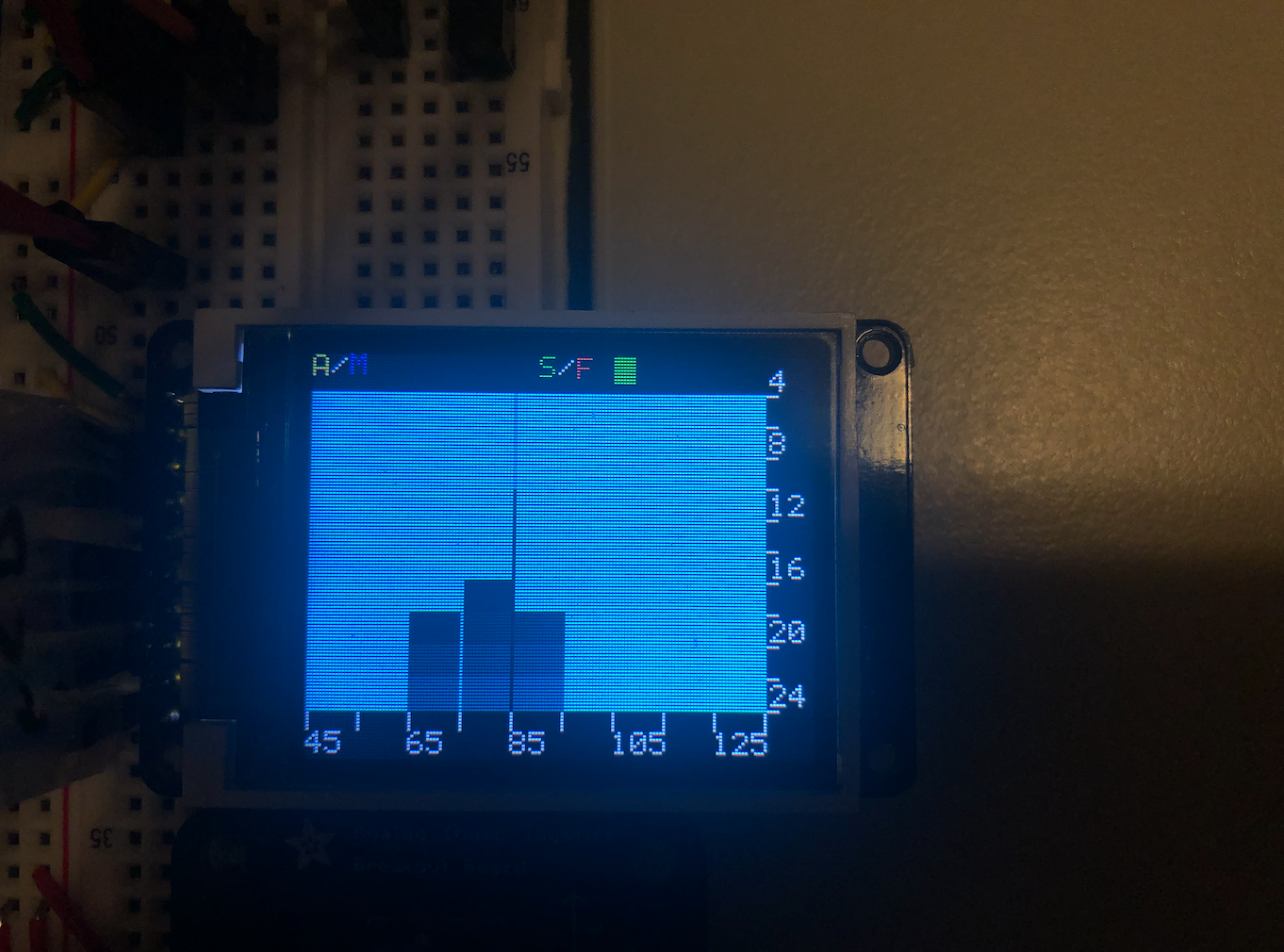
User Interface (far target spotted)
-
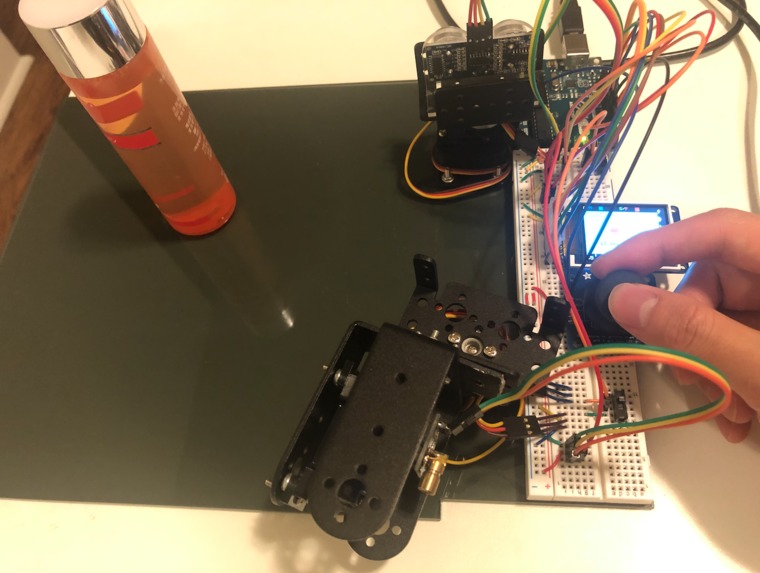
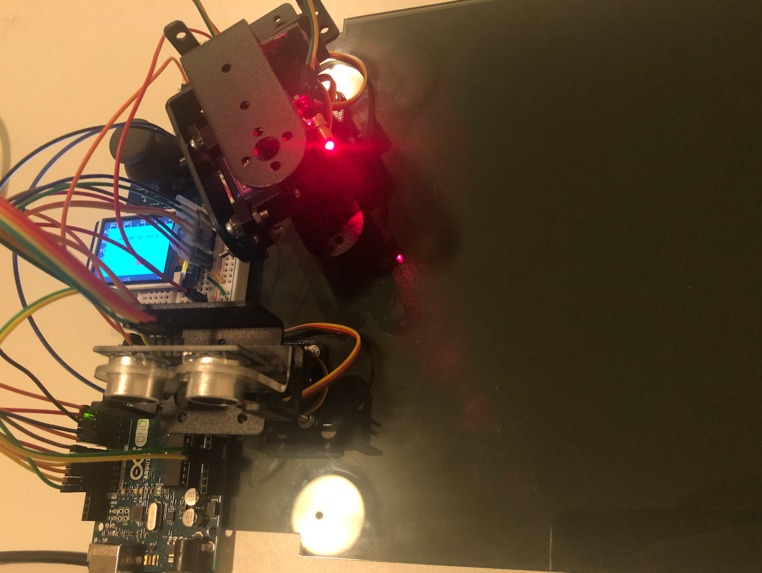
Laser turret control in manual-firing mode
-
Target gets hit in auto-firing mode
Abstract
This project is about building a Radar-enhanced Laser Turret model with UI, which mainly consists of 3 different functional components integrated with Arduino Uno – the radar module, the laser module, and the UI module. The radar module utilizes ultrasonic distance sensor and micro servo motors to detect its neighborhood and sends feedback to the microcontroller. The laser module that consists of laser diodes & micro servo motors is controlled by the microcontroller to target the item with laser beams. The UI module displays what the radar sees on an LCD screen for the user. Additional modules could also be integrated to this model, such as a user control module that utilizes joysticks and buttons for the user to switch between auto & manual modes to fire the laser beams.
Methodology
As described above, we modularize this Radar-enhanced Laser Turret into 3 different parts, so our methodology will be based on the same idea:
Radar Module: o Controlling ultrasonic distance sensor with Arduino o Controlling micro servo motors with Arduino o Mounting the ultrasonic sensors onto the servo motors o Controlling both the sensors & servo motors and testing the analogue feedback
Laser Module: o Controlling the laser diode with Arduino o Controlling the micro servo motors with Arduino o Mounting the laser diode onto the servo motors o Controlling both the laser diodes & servo motors based on the analogue feedback from radar o Using joystick to control the servo motors via Arduino
UI Module: o Writing the library for LCD screen o Drawing the components for the user interface o Integrating the radar analogue feedback to the user interface o Writing the codes for manual and auto modes so that user could switch between these modes via a button
Results
Overall, I complete 5 out of 6 tasks (except the last one) listed for Milestone 1.1 and 4 out of 4 tasks listed for Final Demo. I did not complete the additional task described in Milestone 1.2 due to technical limitation & time constraint.
The final product consists of a radar made by ultrasonic distance sensors & a micro servo motor, a laser diode with two micro servo motors, an LCD screen & a joystick on the bread board and an Arduino Uno, all of which are assembled on a 1/8-inch acrylic platform. It has 3 functional modes: scanning mode, auto-firing mode & manual firing mode. The program goes through these 3 functional modes in an infinite loop based on user interactions.


Log in or sign up for Devpost to join the conversation.