Inspiration
In recent years, a lot of automatic machines have occurred in our lives, and they are applied in many areas such as manufacturing, aviation, agriculture, medical systems, and so on. Those machines replace human beings to do repeatable and tedious work, or tasks that are hard for humans to achieve such as watering, cleaning, or assembling in the workshop with a bad environment. Based on different scenarios, a designed algorithm embedded in a robot machine can be applied in many different areas to relieve people’s work, speed up the working efficiency, and reduce the cost. So, it would be a cool experience to design an automatic machine to do a job based on my designed algorithm using what we learned from this class.
What it does
An automatic car would follow the instruction of the embedded algorithm to automatically find out an exit of a designed maze. An extra wireless controller system was built to remotely interrupt and control the car.
How we built it
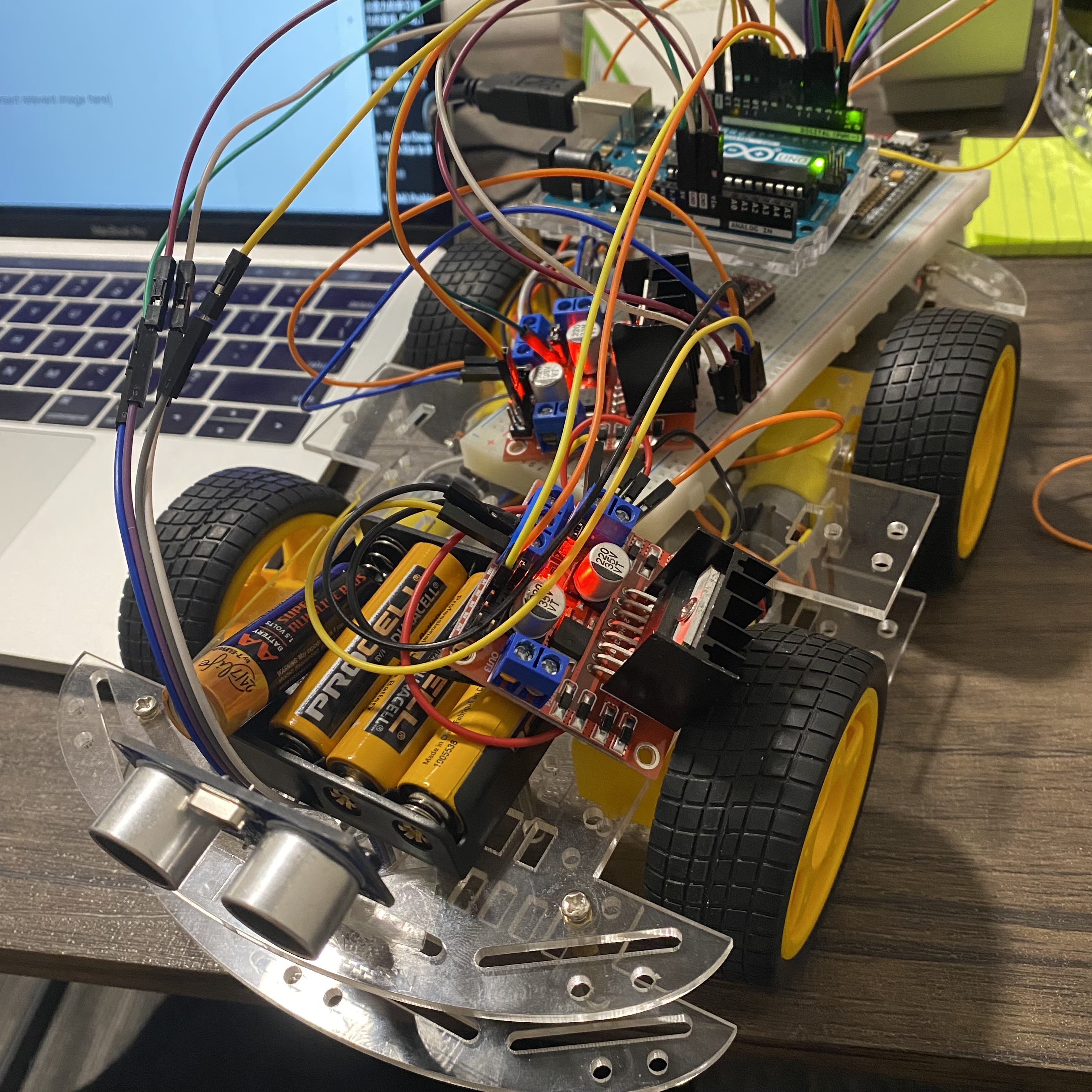
The car is assembled based on an Arduino Uno board, with a motor driver, an ultrasonic sensor, 4 wheels installed on 4 gear DC motors, two L298N boards with each of them control two DC motors, and a nodeMCU.
Challenges we ran into
I used L293D motor shield board instead of L298N board before, and it used I2C bus to connect with Arduino uno instead of PWM. After figuring out the embedded libraries with L293D motor shield board, I decided to change with L298N because PWM and other interrupts such input capture can be used and learned to connect with Arduino uno. Then we can apply more as we learned from the class.
Accomplishments that we're proud of
Two goals are achieved: obstacle avoidance and controlling with the Blynk App.
What we learned
PWM was applied to control the speed of the car. Input capture was used to measure the distance in front of the car.
What's next for Escape from A Maze
Build a maze environment to navigate from the it. Draw a navigation path to serial port.

Log in or sign up for Devpost to join the conversation.