-

Title Page
-

Team Page
-

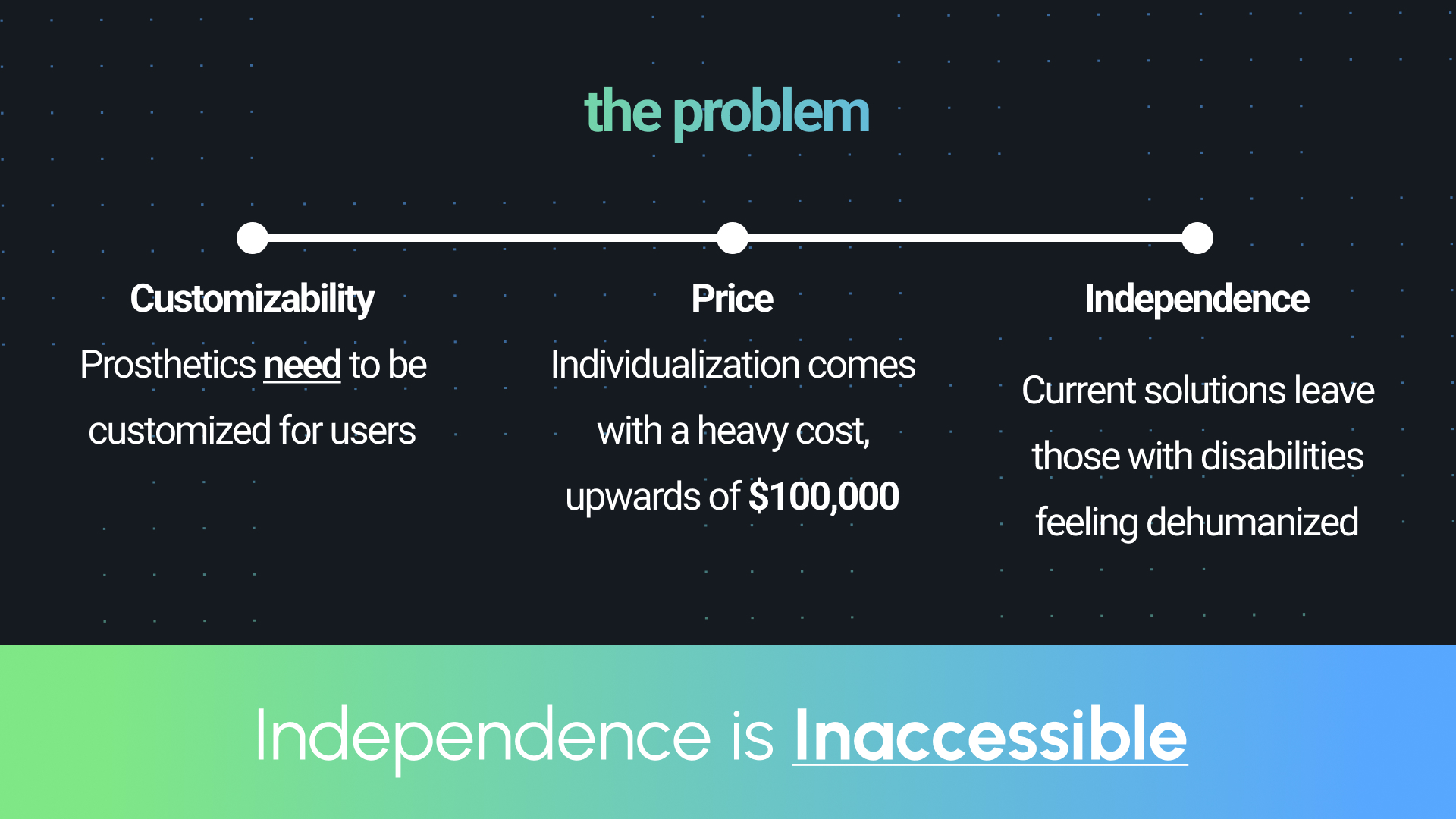
Problem Statement
-

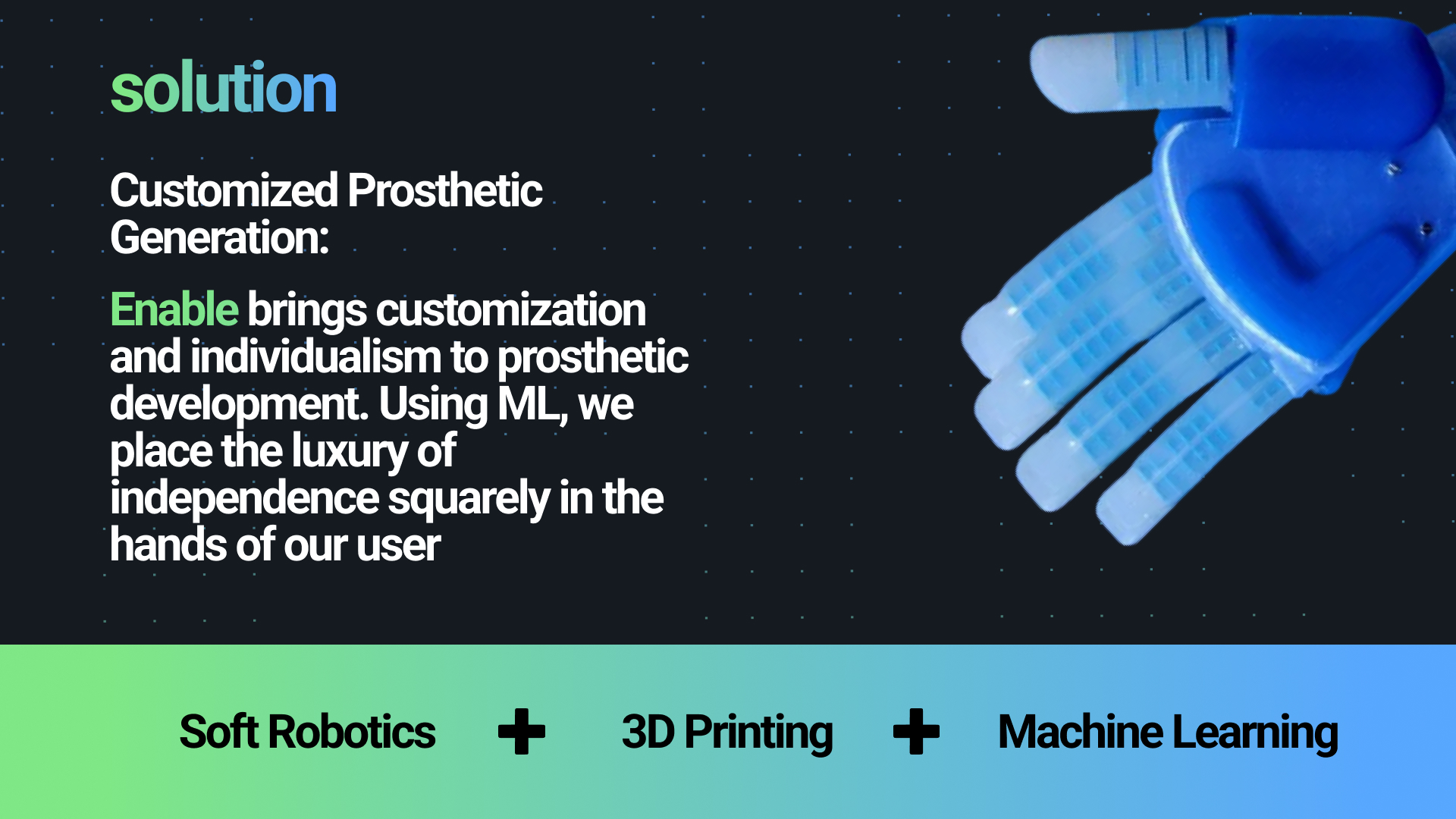
Solution Overview
-

Demo
-
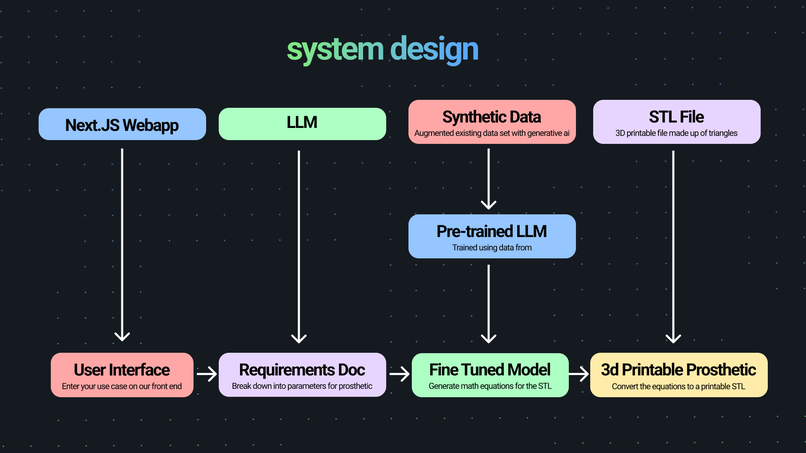
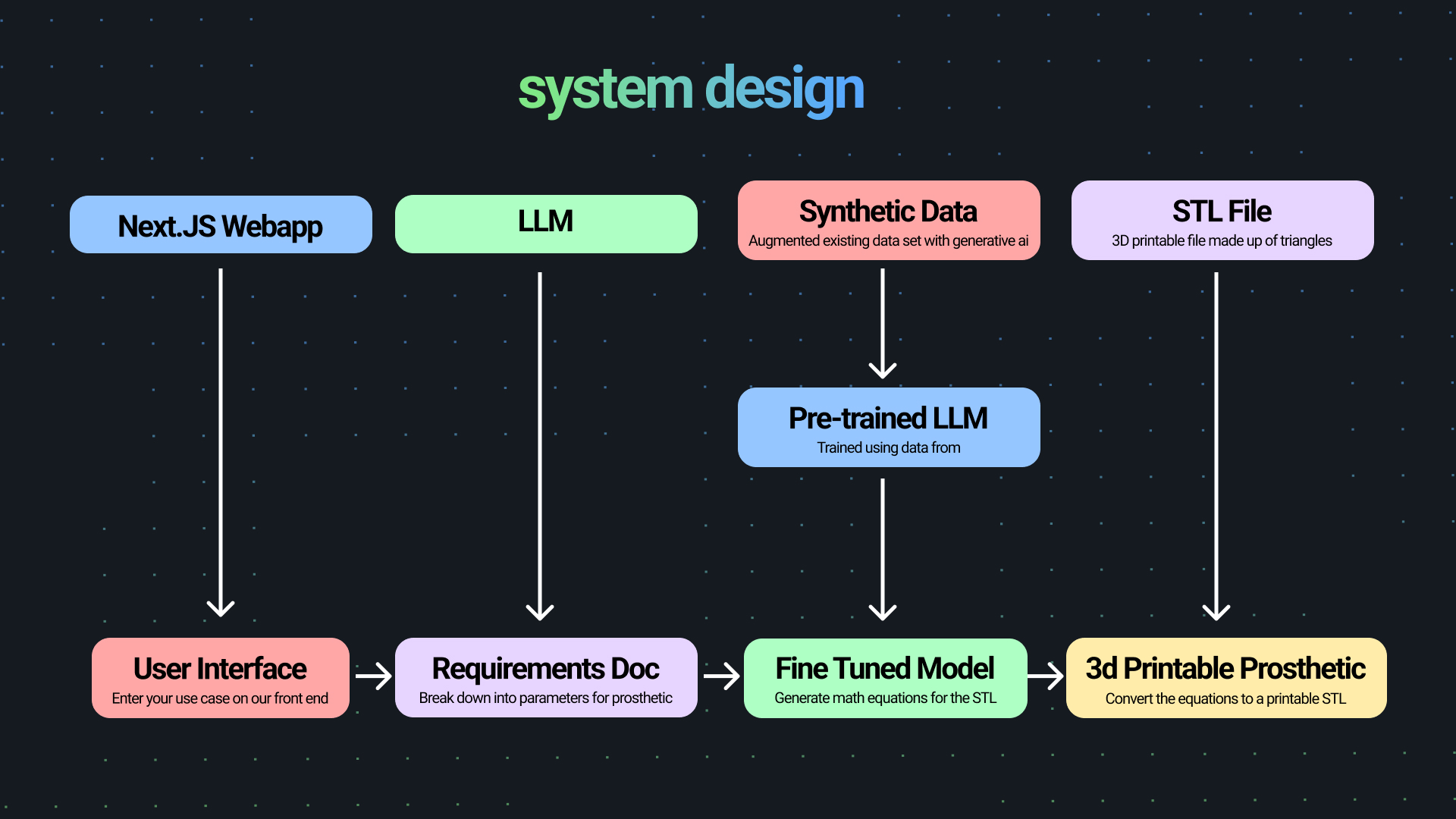
System Design
-

Thank you!




Inspiration
After years of working with individuals facing disabilities, one thing was clear: the assistive technology market was extremely underserved. All solutions that did exist in the space were mediocre at best and ignorant of what truly periled the end users, and left individuals disheartened and with no other recourse. In the status quo, prosthetic devices must be customized for their user. Because of this, prosthetics are associated with incredibly high costs, costing tens of thousands of dollars. This cost establishes an extremely difficult barrier to access, blocking people who desperately need assistive technology from receiving it. Enable seeks to break down that barrier, and make independence accessible.
What it does
Using an LLM model, Enable takes in a natural language input and returns a prosthetic, ready-to-3D-print file. Users type in a prompt related to a specific use case - say, "I want to play the guitar". Our fine tuned model takes in that input, analyzes what that action requires, and returns a prosthetic design STL, a file that's ready to 3D print. This revolutionary, novel approach enables individuals to gain access to crucial assistive technology from the comfort of their own homes, with no need for an engineer or designer, all at an extremely affordable cost. Each of these generated prosthetics are modular, attaching to one central mount that provides pneumatic - or powered by air through pumps - power. This enables rapid flexibility and an unprecedented opportunity for independence, something that was previously unheard of.
How we built it
Our interface has a lot of moving parts. The process centers around 3D printing, specifically to make our prosthetic models. Using open source software and our fine tuned model, we use 3D printing as our primary manufacturing technique. To create these files, we interface with a mathematical model capable of mapping equations to stereolithography (STL) files. These files are then taken into a printer-specific software that prepares it for printing. Going back to our mathematical model, we rely on an LLM to take our natural language inputs and turn them into requirements and parameters, each of which are deducted into mathematical representations and eventually, physical characteristics. On the front end, we utilize next.js to manage our GUI.
Challenges we ran into
Manufacturing our prototype was by far the biggest hurdle we faced. Soft robotics, even when done perfectly, can take many print iterations to yield a successful product. Within the time constraints we were provided, we only really had one chance to make a solid, functioning product. While our final product isn't entirely functional, we were able to successfully produce a physical representation of our device. Additionally, fine tuning our model to match our required parameters was quite a challenge. Having to interface between natural language and 3D models is no easy task, and we definitely struggled with it. There were multiple representations we could have used for voxels and other model architectures, such as VCNNs and NERFs. We spent an extensive amount of time testing each of these models out and identifying an optimal implementation. Between the both of these, we lost a lot of time trying to troubleshoot that we would have liked to invest in building upgrades. Despite this, our hurdles gave us more time to understand the decisions that we made, ensuring that we could present an effective model at the end of the day.
Accomplishments that we're proud of
We were able to fully print a prototype at the hackathon! As was mentioned earlier, having a viable print can often take numerous attempts, and we were able to successfully complete a prototype 20 hours into the hackathon. Additionally, we successfully generated synthetic data to train our model in order to combat an overwhelming lack of training data in this field. Synthetic data is data generated by an LLM by carefully monitoring and extrapolating the few parameters we had to work with. Using this strategy, we were adequately able to train a model using few shot learning in an otherwise data-barren industry.
What we learned
Independence doesn't need a $50,000 price tag.
What's next for Enable - Automated Generation of Prosthetic Devices
We hope to work with rehabilitation, trauma, and healthcare centers to be the premier provider for cheap, reliable, and accessible prosthetic devices. Additionally, we plan on working to integrate an electrically powered mount into our system to wean away from our pneumatic approach.
Built With
- 3dprinting
- finetuning
- flexiblefilament
- gpt
- matlab
- ml
- next.js
- pneumatics
- rapidmanufacturing
- softrobotics
- syntheticdataaugmentation
- vercel





Log in or sign up for Devpost to join the conversation.