-
-

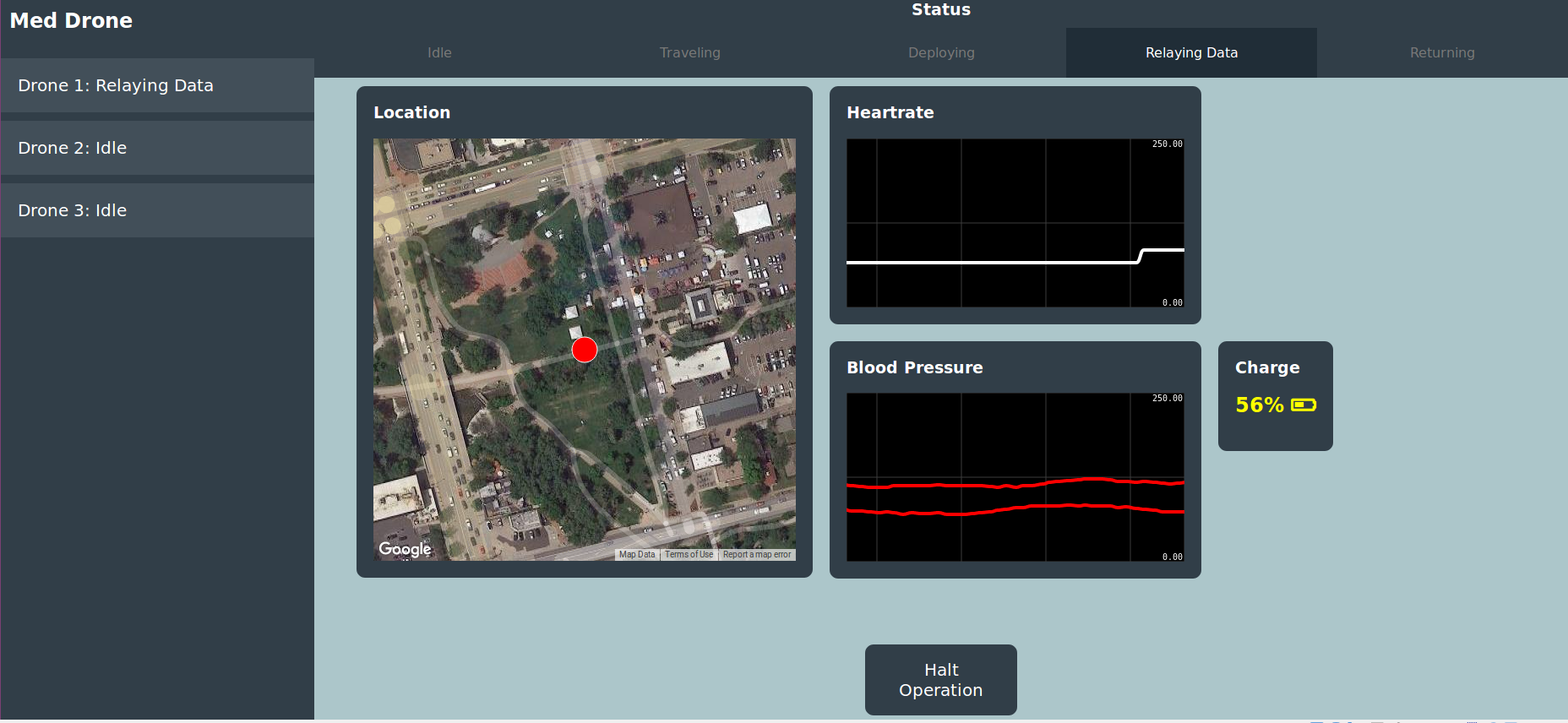
Our EMS dashboard
-
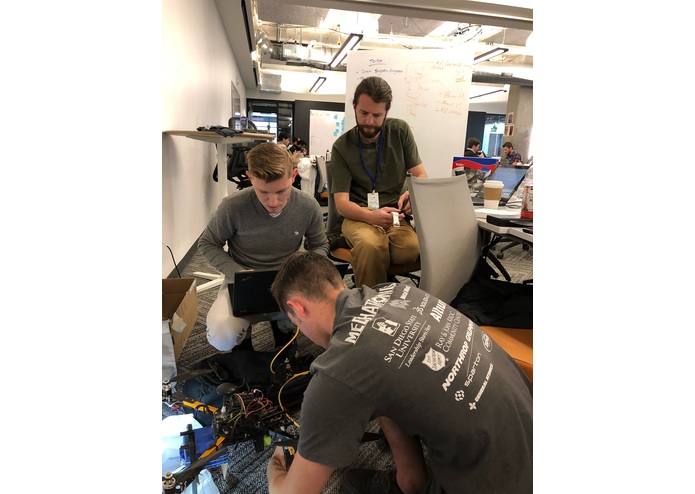
Hard at work!
-

Our first test flight
-
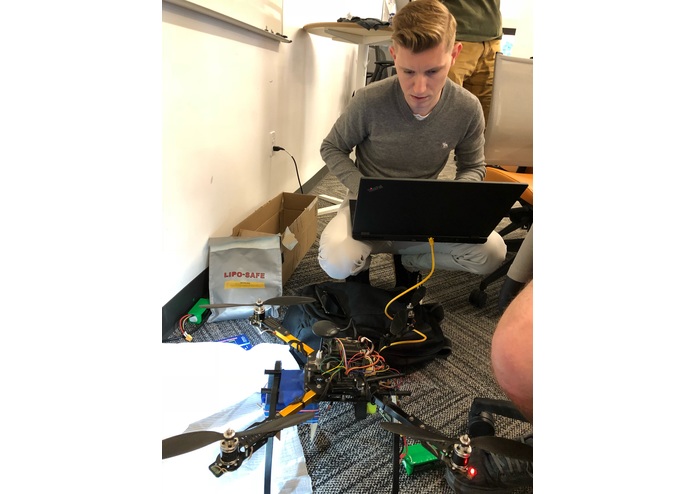
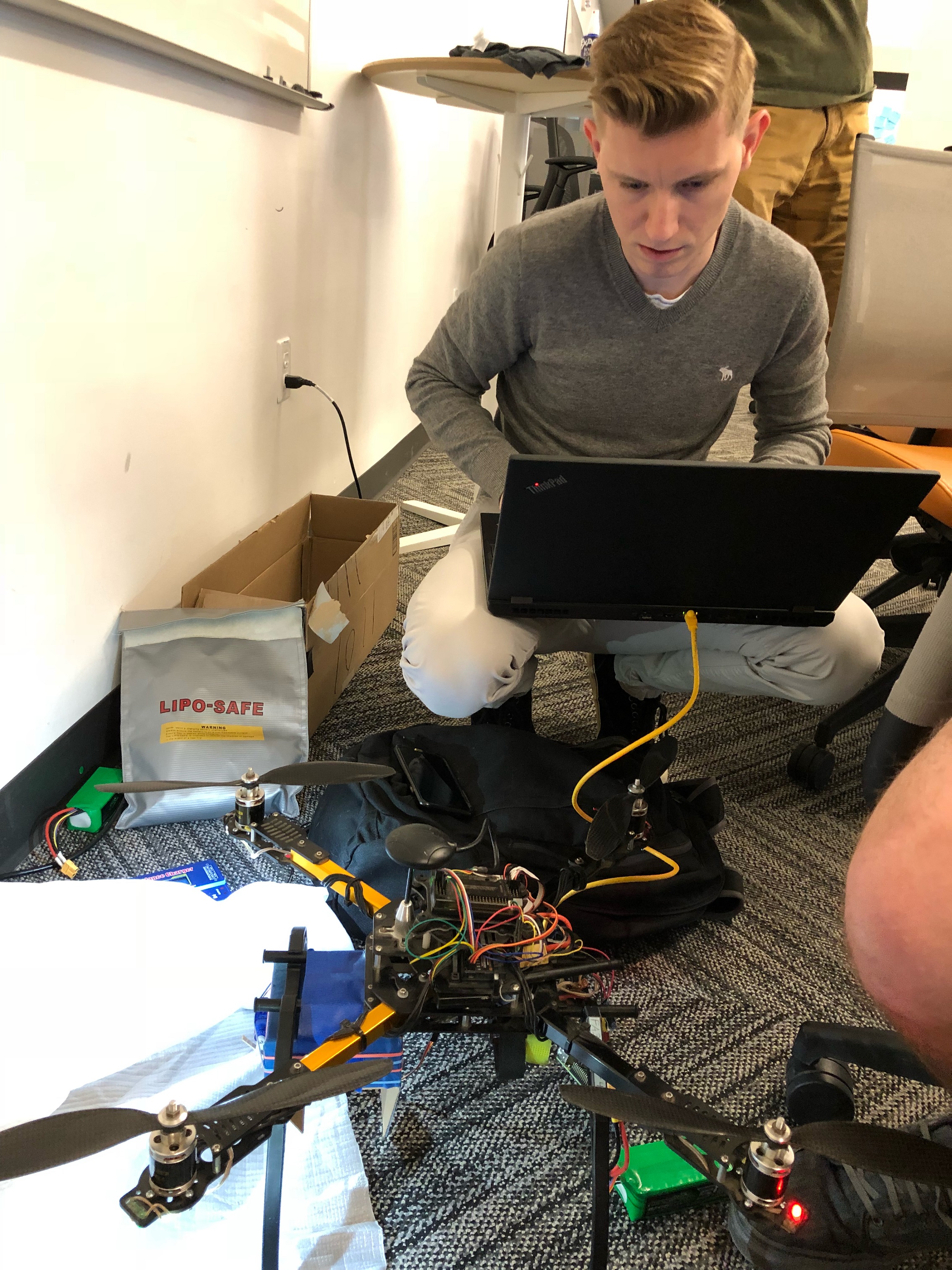
Setting up the drone
-

Preparing our demo



Inspiration
We wanted to assist EMS personnel in rapidly assessing emergencies and acquiring crucial data about a patient as quickly as possible. After throwing around a bunch of ideas, we decided that drone could help EMS prioritize events and have data on the patient before they even arrive.
Concept
The Rapid Response Drone is intended to rapidly deploy medical monitors such as heart rate, blood pressure, voice and video, etc. to patients in need ahead of EMS arrival. The drone then waits above the patient to relay communications from the dropped package back to the EMS dispatch via dedicated EMS networks.
What it does
Our fully autonomous drone is able to launch, navigate to an injury victim, and drops a payload to that can relay biometric data while paramedics arrive. Our payload is a Pebble Smartwatch with a heartbeat sensor, which can be successfully dropped via drone. The drone is equipped with a Raspberry Pi that relays the heartbeat back to our dashboard.
How we built it
We created a payload mechanism that was controlled by a drone and mounted next to a Raspberry Pi that communicated with the Pebble Watch over Bluetooth. The Raspberry Pi was connected over WiFi to our EMS base station and was able to relay the data coming from the watch to our dashboard. The drone was able to fly to the patient and release the payload completely autonomously.
Challenges we ran into
The multi-step communication to get the data from the Pebble Watch to our dashboard was difficult, and our lack of dedicated hardware forced us to use WiFi hotspots as middlemen to allow the components to talk.
We also had no way to autonomously identify the patient, so their location had to be coded directly into the drone's flight path (see "What's Next").
Accomplishments that we're proud of
No one in our team had prior experience with the Pebble and integration proved difficult. But after much debugging, we were able to read heart rate data in real-time from the Pebble and transmit it via Bluetooth, forward it through a local WiFi network, and plot the patient data in our ground station - all in real time!
We also managed to build an entire servo-driven payload drop system with the limited materials on-hand, and integrate it with the quadcopter so it released at the right moment during our programmed GPS route, live, in an outdoor environment!
What we learned
Our team had a mix of engineers from mechanical, electrical, and computer science fields, meaning everyone had to work with something they didn't have experience with before. We also figured out how to use the Pebble watch.
What's next for EMS Rapid Response Drone
The biggest improvement that we're hoping to make is to allow the drone to autonomously identify and navigate to the injured patient. This could happen in a number of ways, including:
- GPS location through phone application
- Location given by 911 call
- Rough triangulation of cell tower connection and final location by human or video processing
- Dedicated hardware a hiker, skier, or other person could take with them
- Detection by visual and infrared imaging from the drone
- Computer vision detection of injured patients
Additionally, we want to improve the payload capabilities such as adding additional biometric sensors and verbal/visual communication between the patient and first responder. We also want to enhance our deployment system by making our dashboard analyze patient stability and triage multiple patients in need of aid. Finally, we think that this drone could be paired with a swarm of multiple remote teams in the event of natural disasters or active shooters to assist many people at once.
Built With
- c
- coffee
- drone
- javascript
- pebble
- python
- raspberry-pi

Log in or sign up for Devpost to join the conversation.