-
Motor controller
-

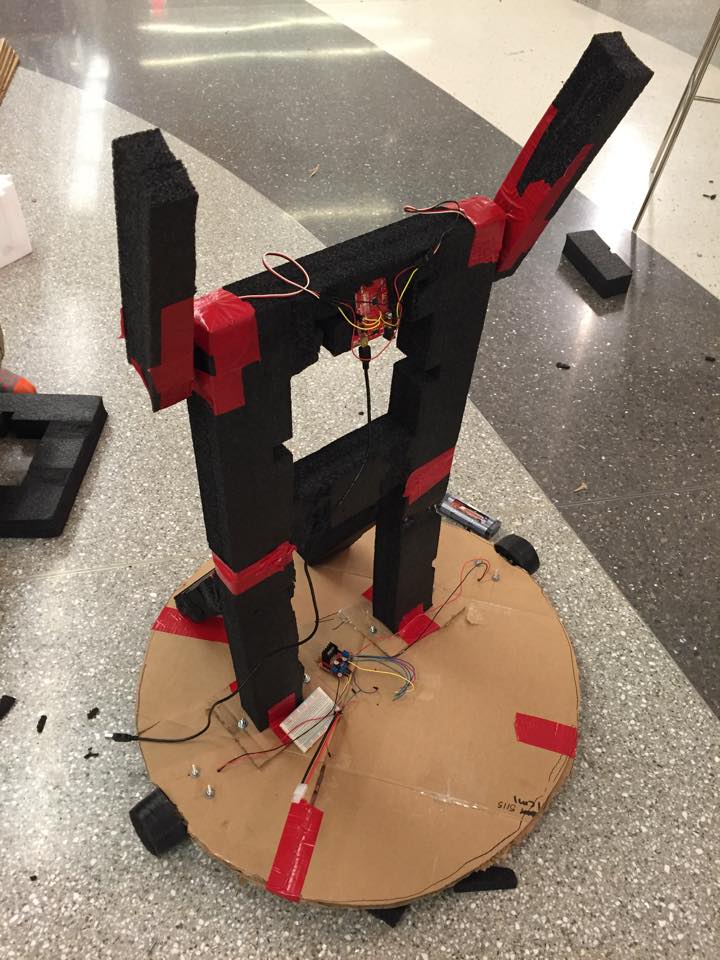
Baby steps
-

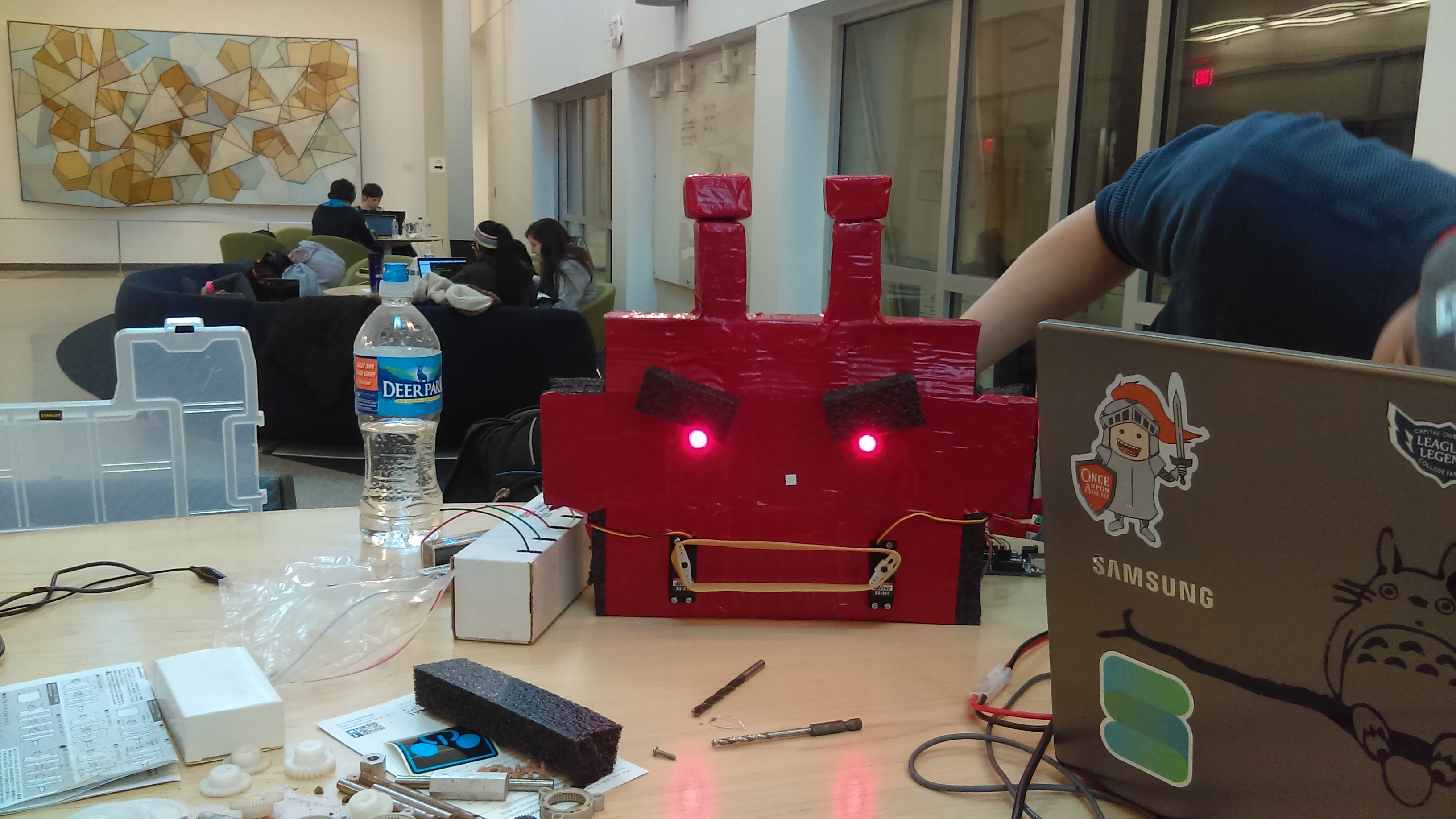
The Head is alive
-
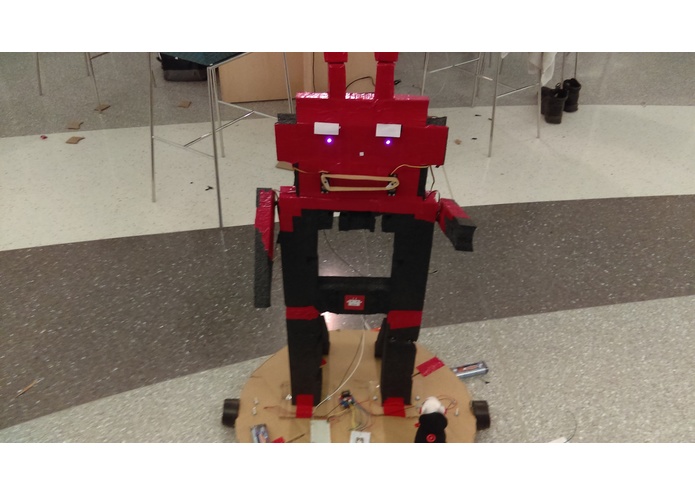
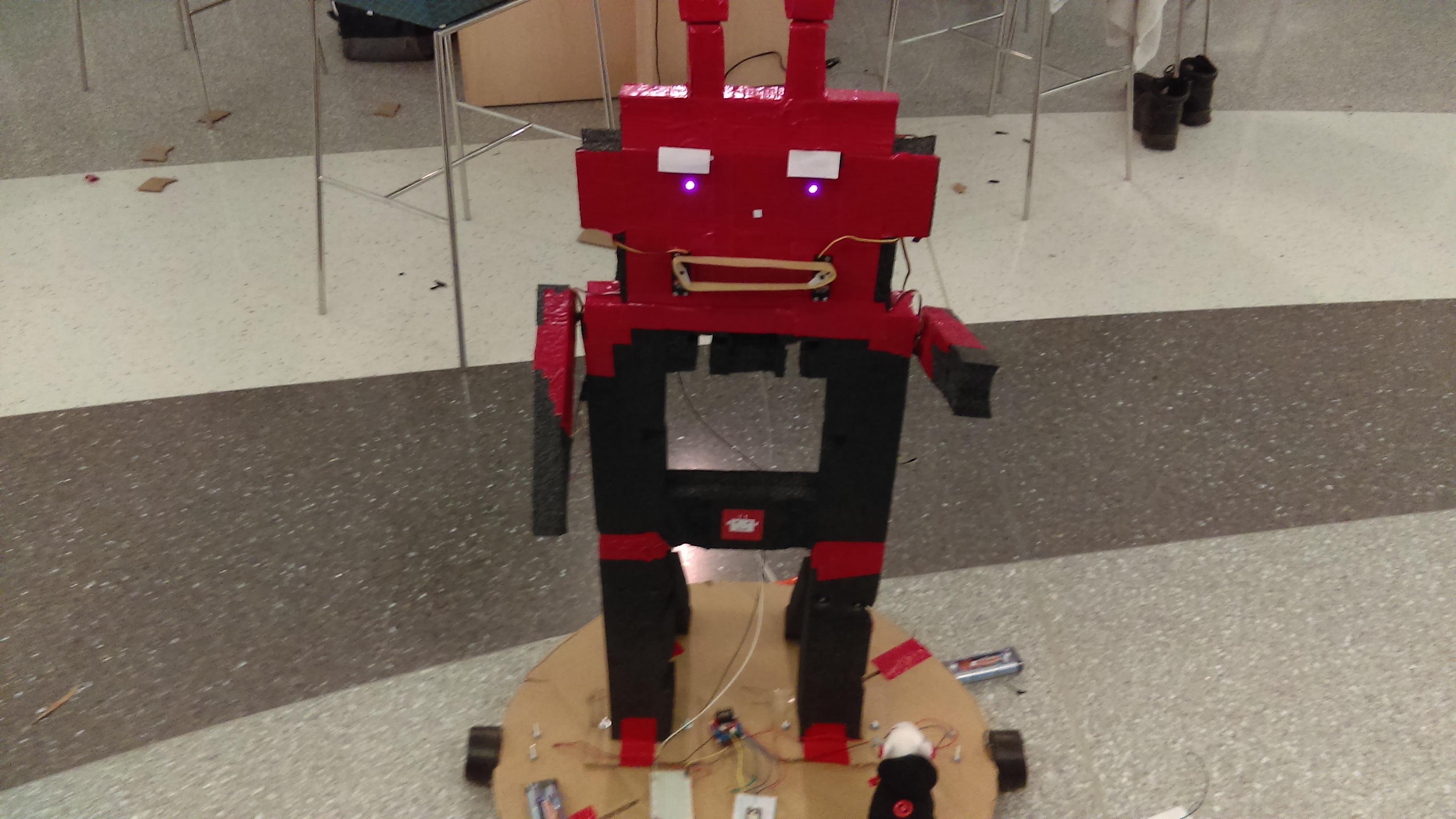
Its complete!
Inspiration
At the University of Maryland, Terrapin Hackers has its own hackerspace: Collider. Often times, many hackers come into the space with an idea in mind, but are unsure of how to technically implement them. However, there are not always other, more experienced people in the space to lend a hand.
We wanted to make a robot that could be a permanent member of the space to assist all hackers.
What it does
The robot, named ________, incorporates whimsical movement along with facial expressions that can be changed via the internet.
How we built it
We started out by dumpster diving for parts. The robot is on a circular platform that has two motors (each with 4 planetary gears for torque) for stability. The frame of the robot is made of foam.
Challenges I ran into
The motors don't necessarily have enough torque to move the robot. When we return to Maryland, we will likely replace these with servos so the robot can move around.
Accomplishments that I'm proud of
Creating a mechatronic face to display different emotions. including sadness, happiness, anger, fear, etc.
What I learned
Spark Core.
What's next for Ruby
This is the very beginning. We are bringing it back to Maryland for all of Terrapin Hackers to use. Here are all possible applications for this robot: Placing an LCD screen on the torso to enable visual interaction Voice control for information regarding inventory Photoresistors to detect when someone enters Collider and turns on the light Distance sensors to allow the robot to move around freely with obstacle avoidance capabilities

Log in or sign up for Devpost to join the conversation.