-
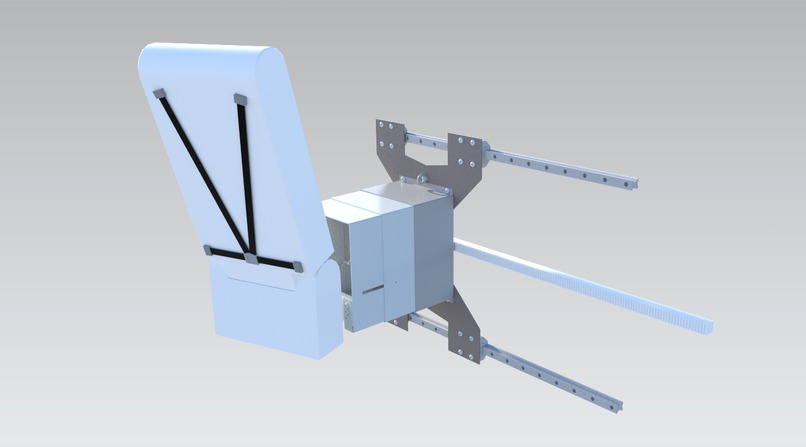
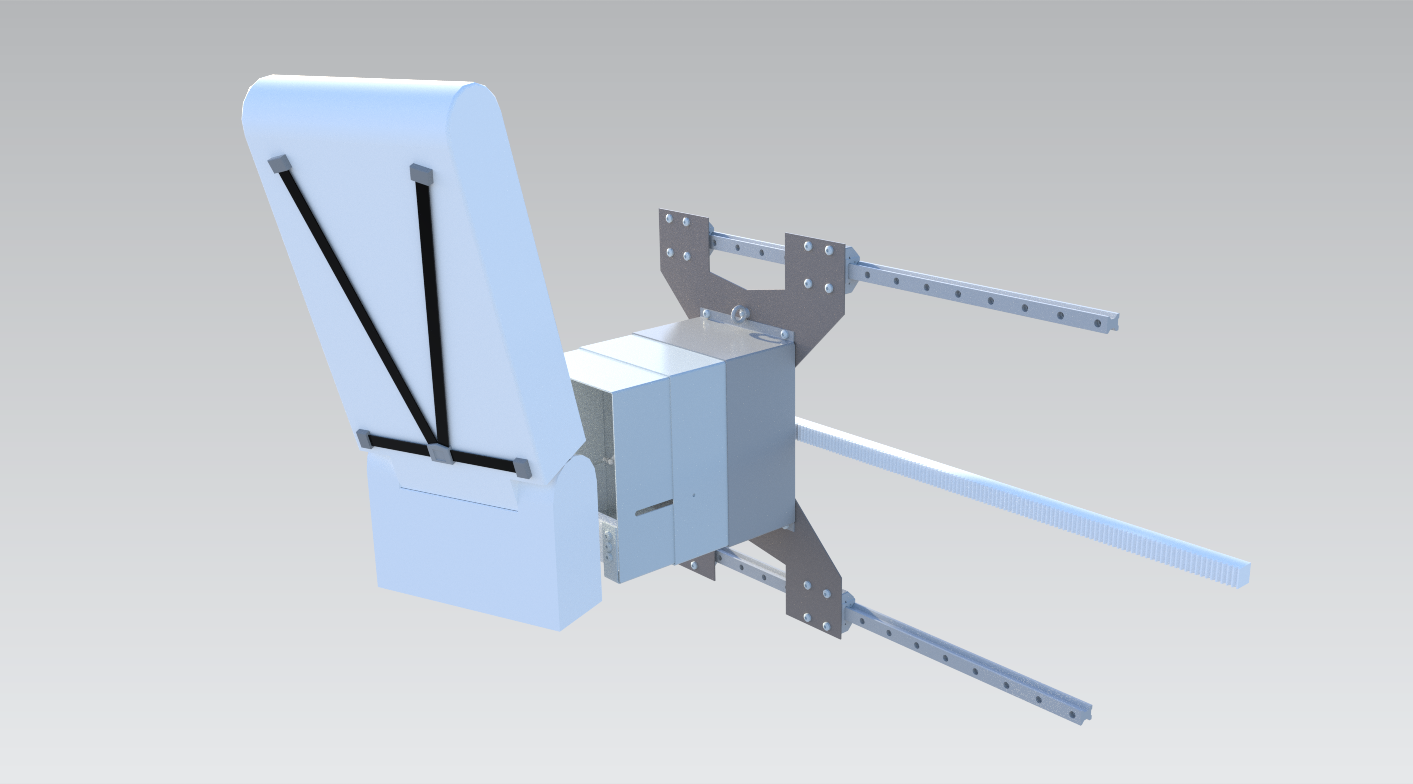
Isometric of full render.
-
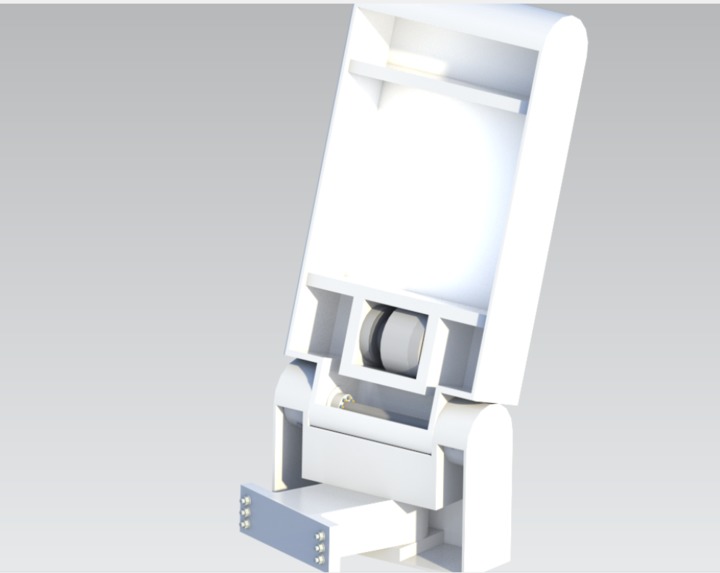
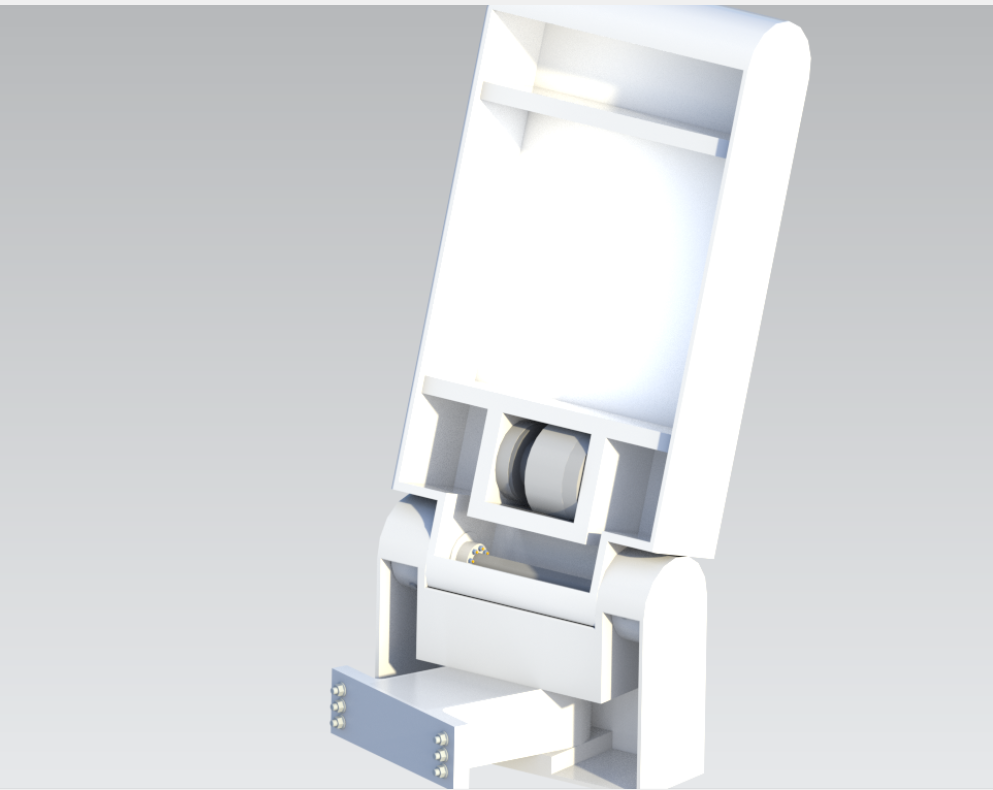
Render of the backpack including the pulley system in the middle.
-
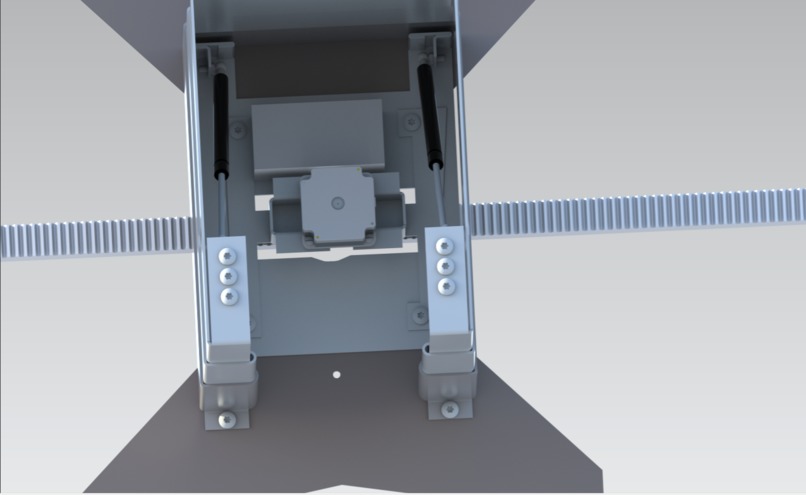
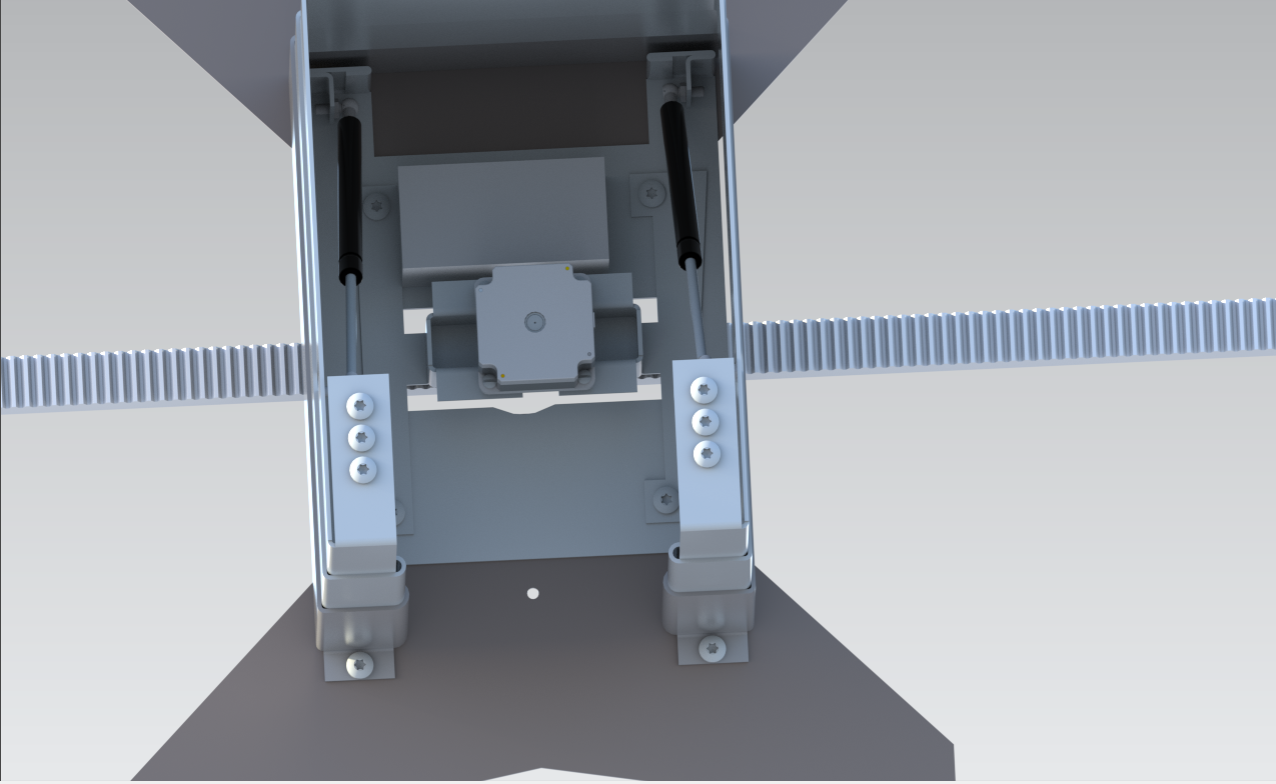
Render of the linear extender and rail break system.
-
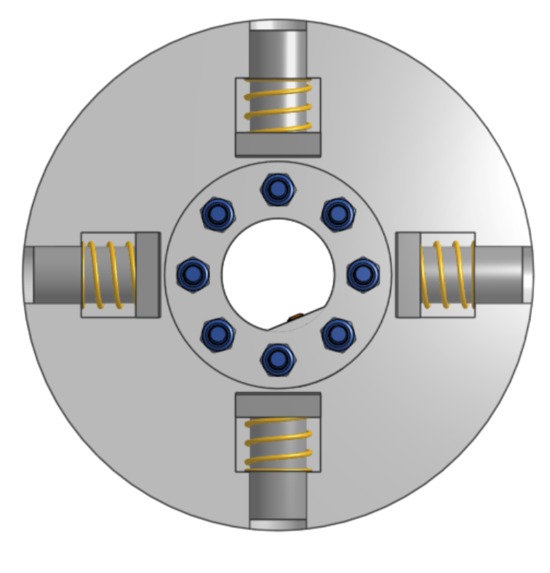
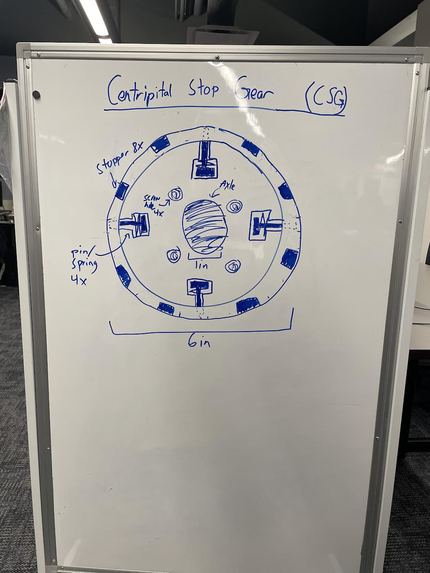
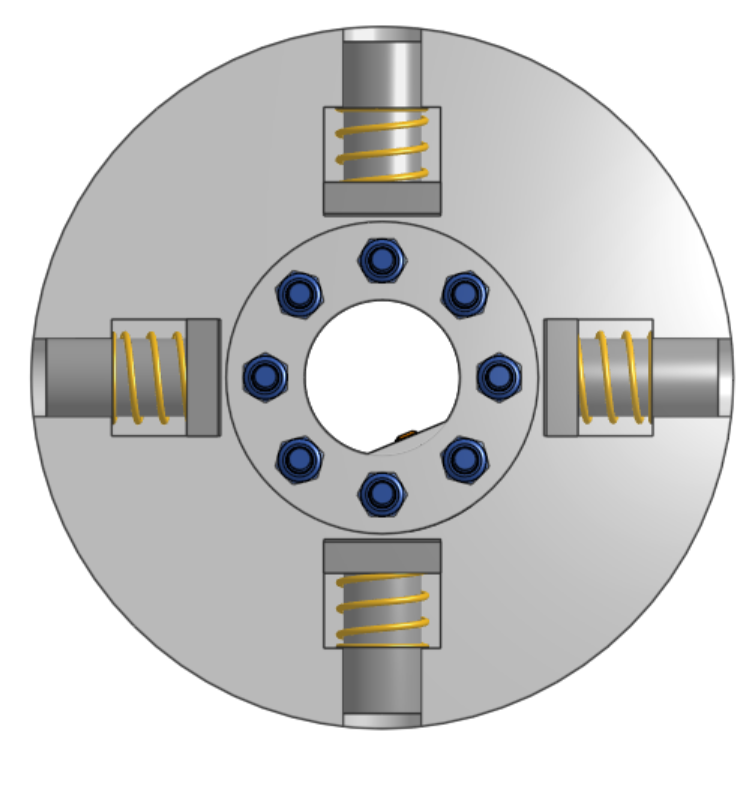
Top view of the CSG.
-
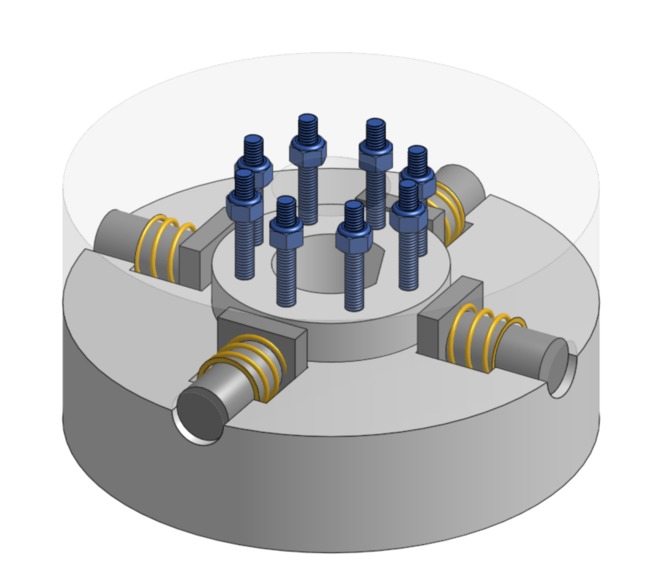
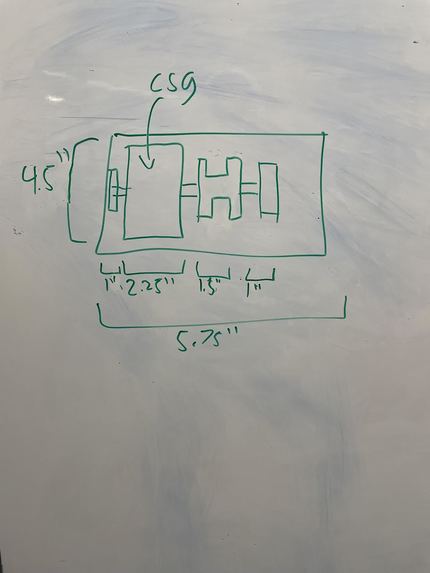
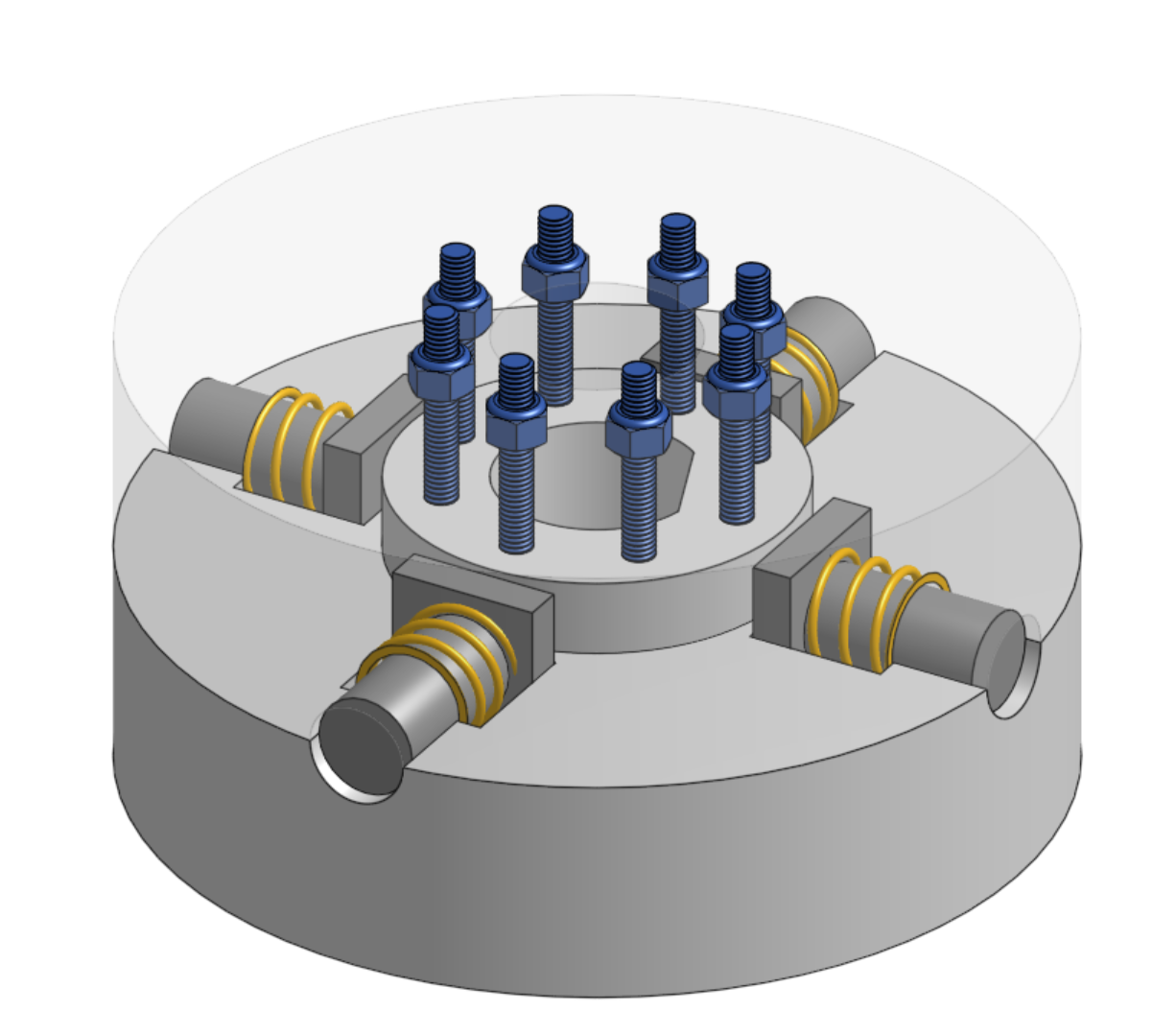
Isometric view of the CSG.
-
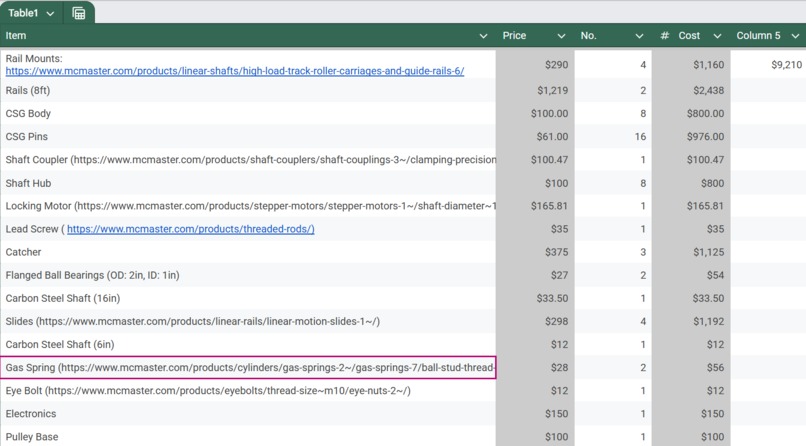
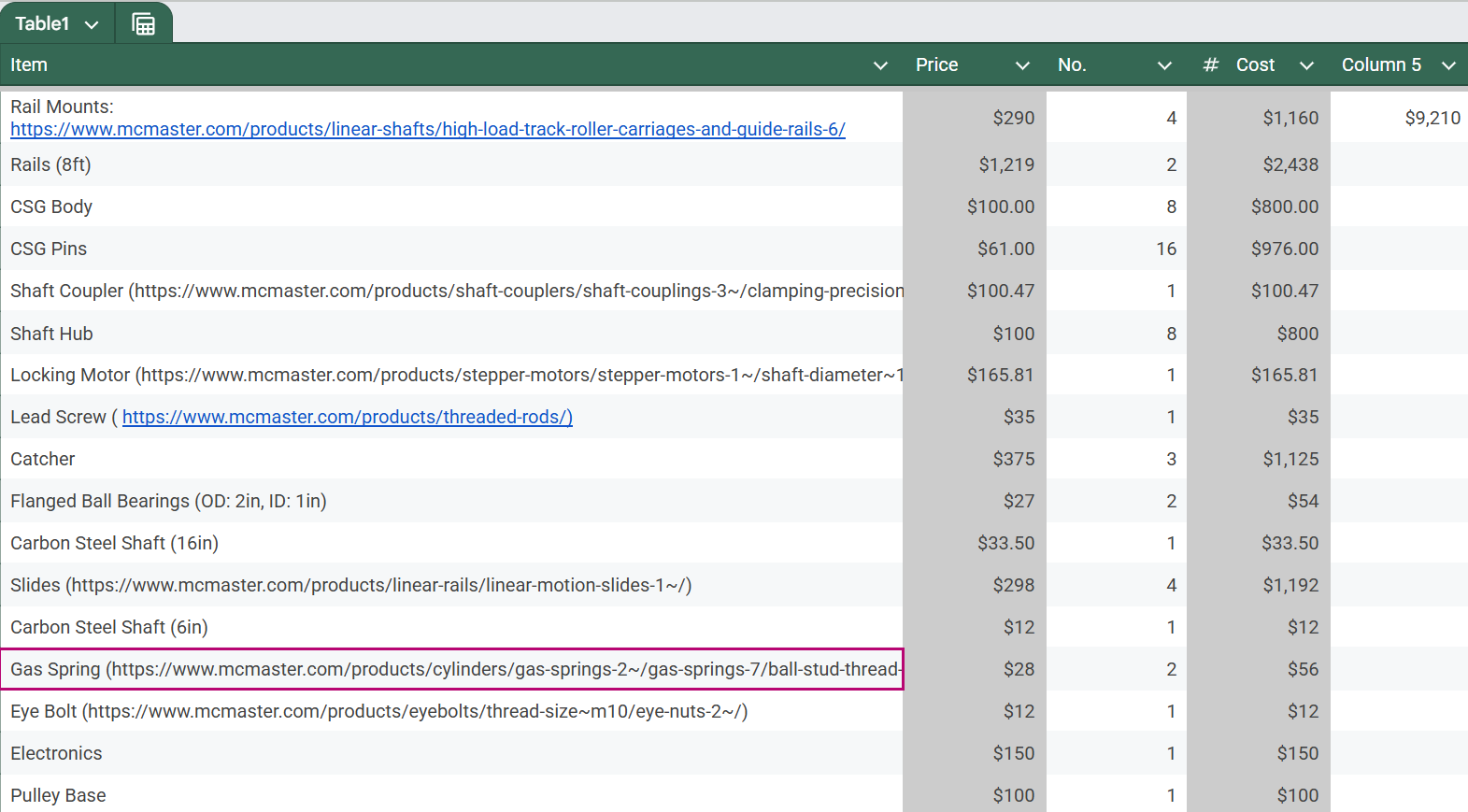
Running cost spreadsheet.
-
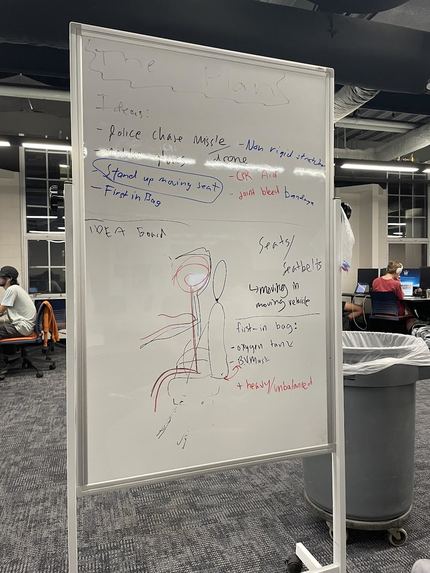
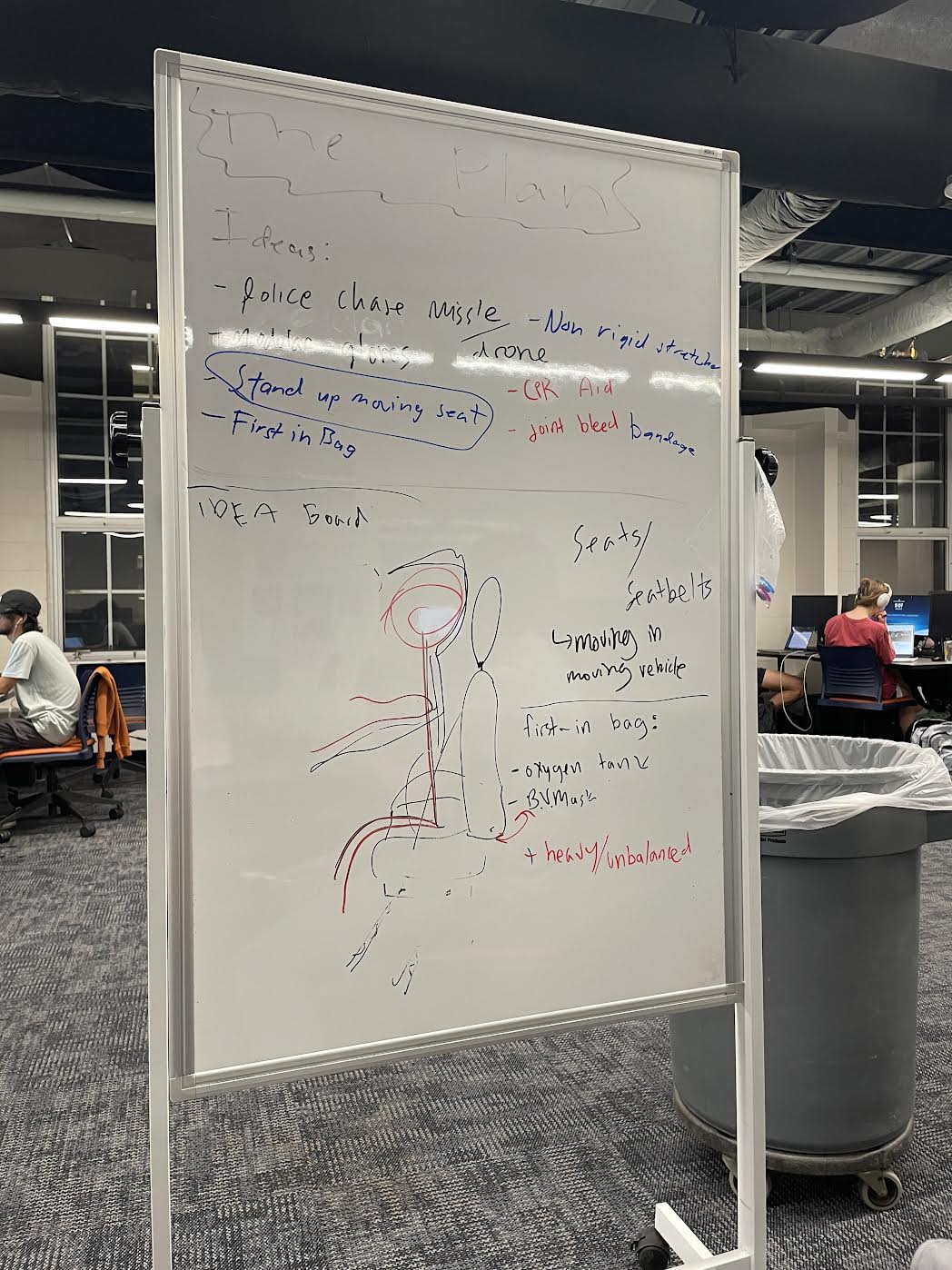
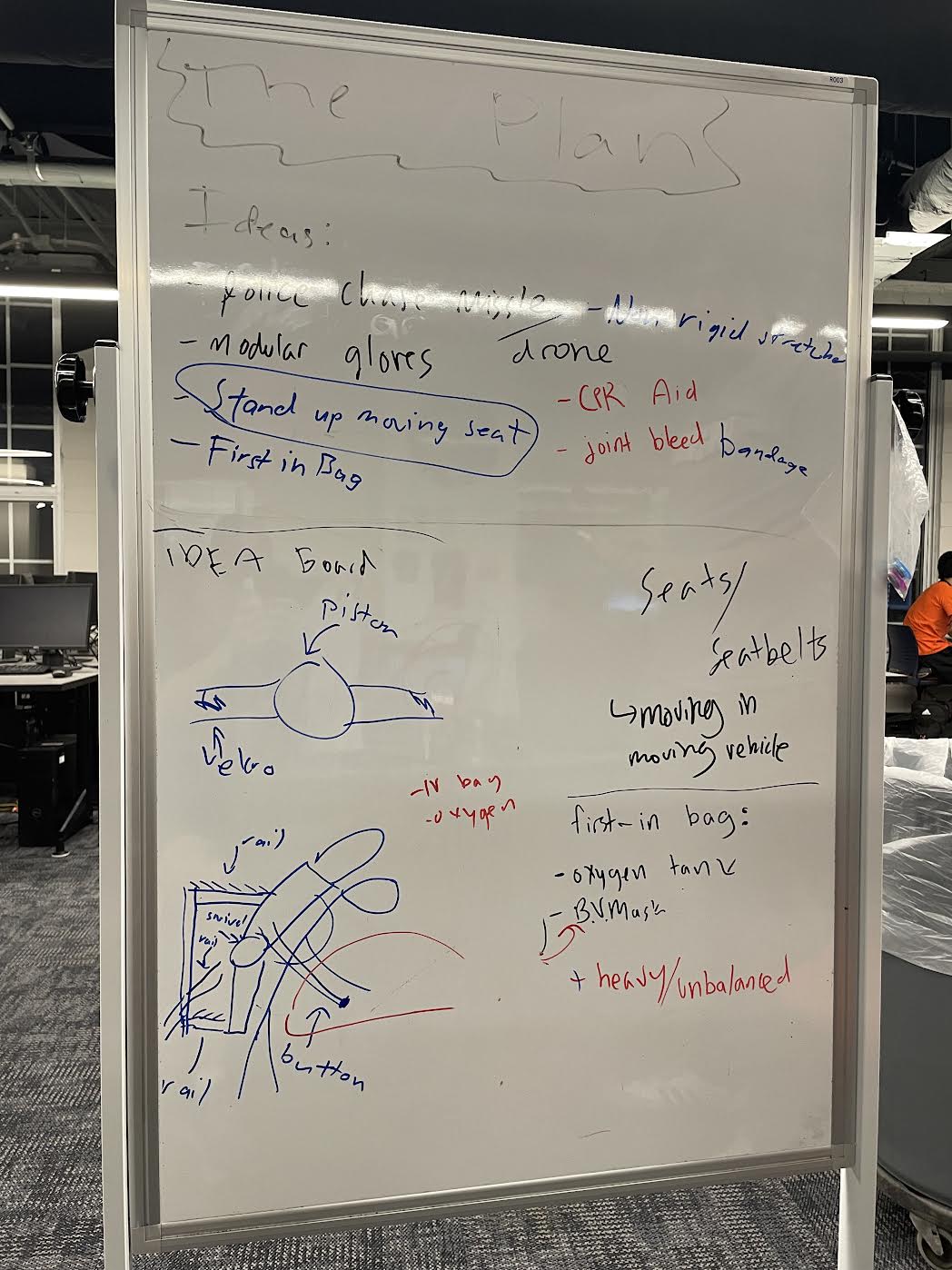
Initial brainstorming.
-
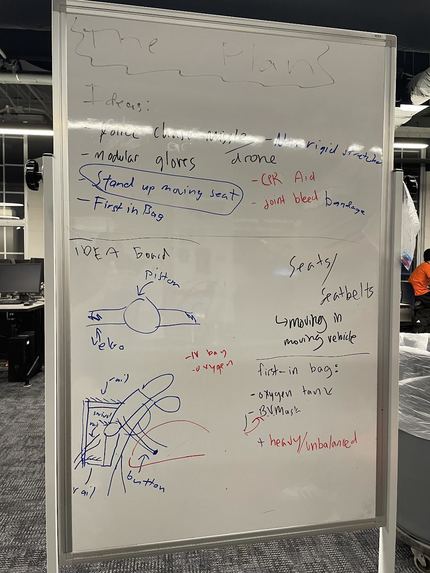
More brainstorming and first draft design in bottom left.
-
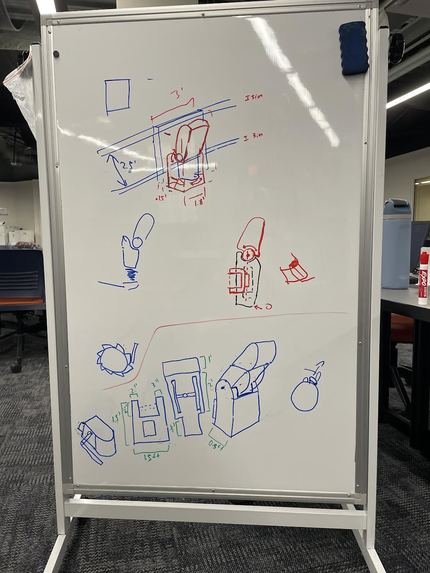
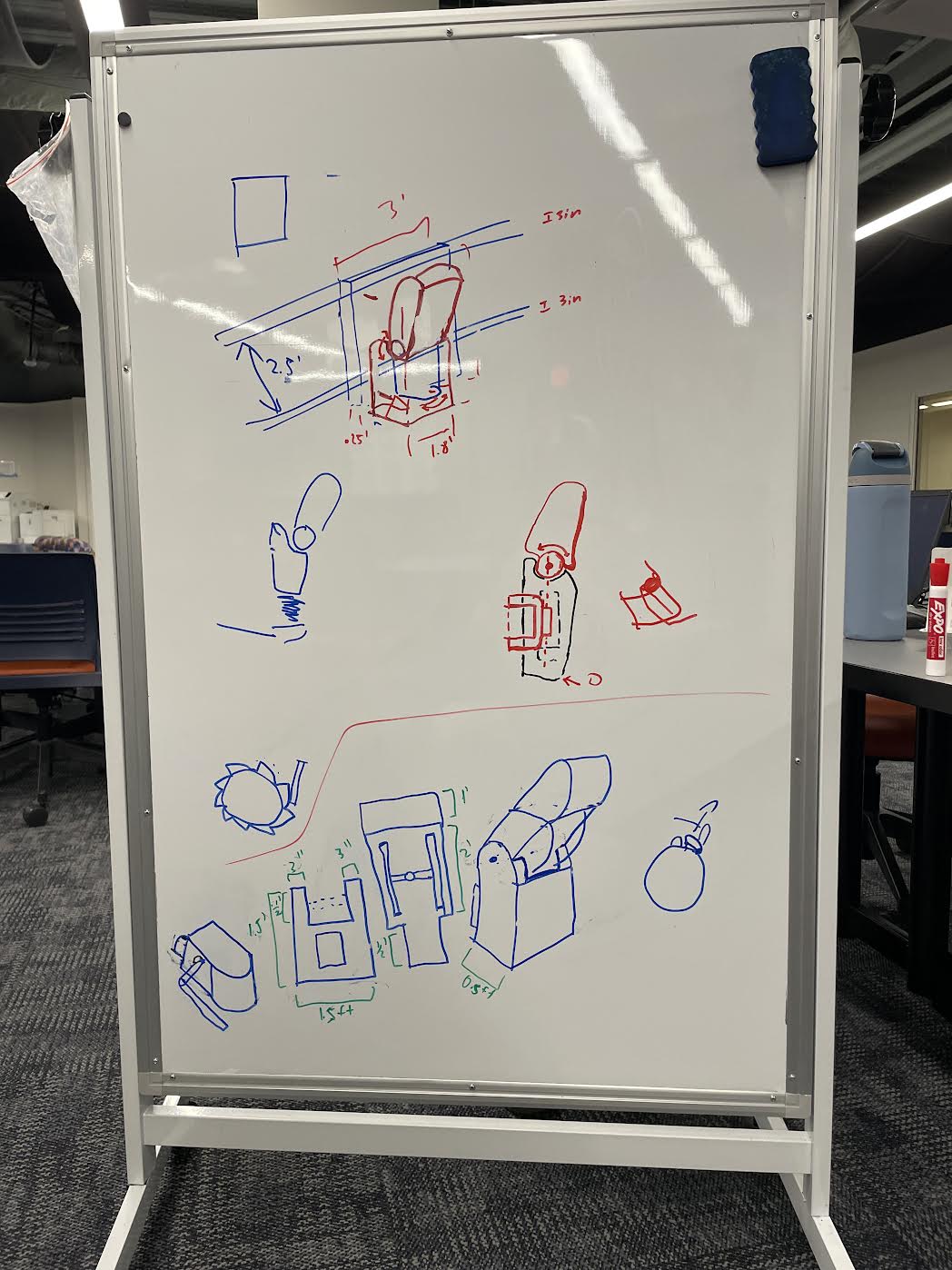
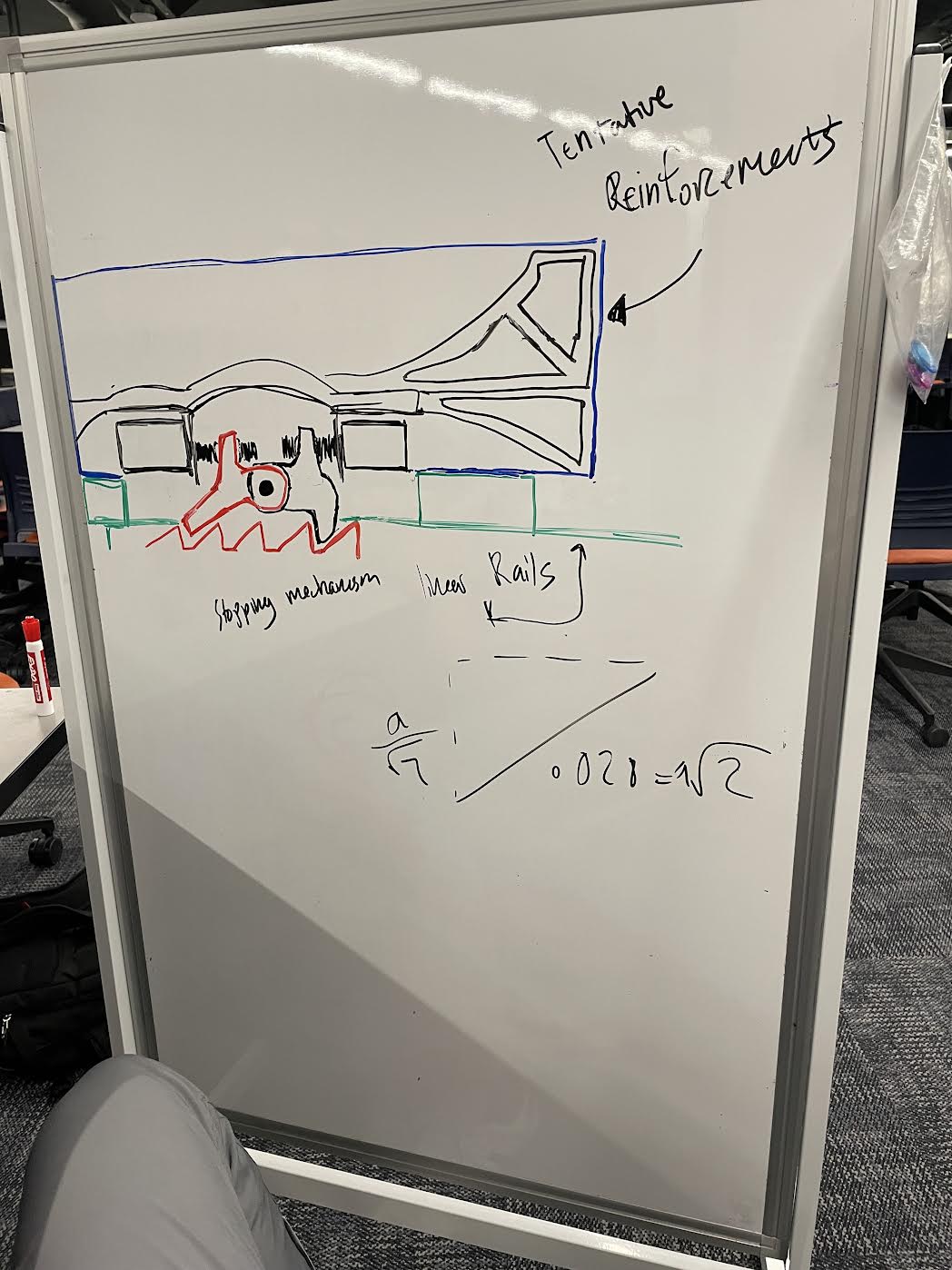
More detailed sketching of design.
-
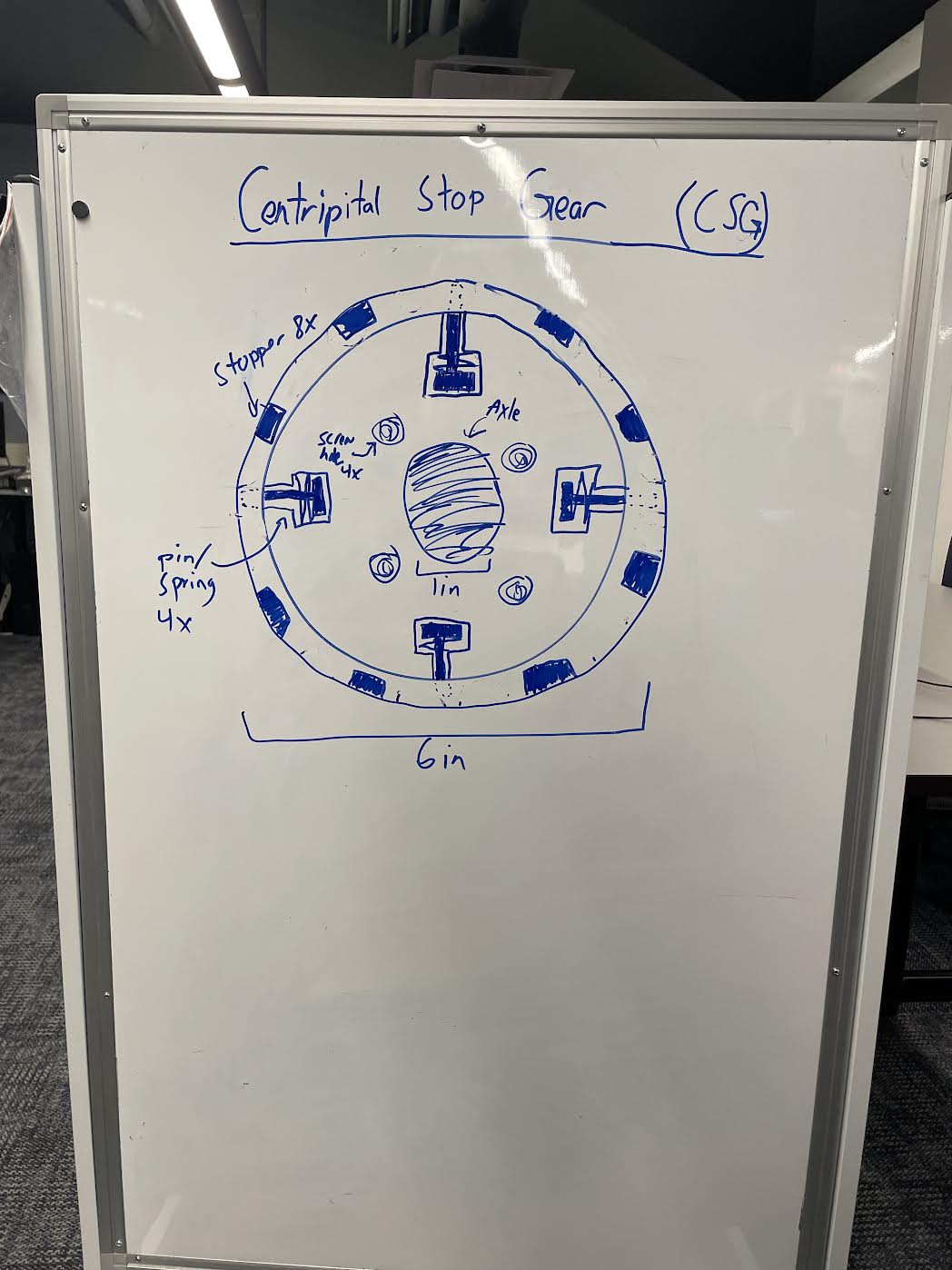
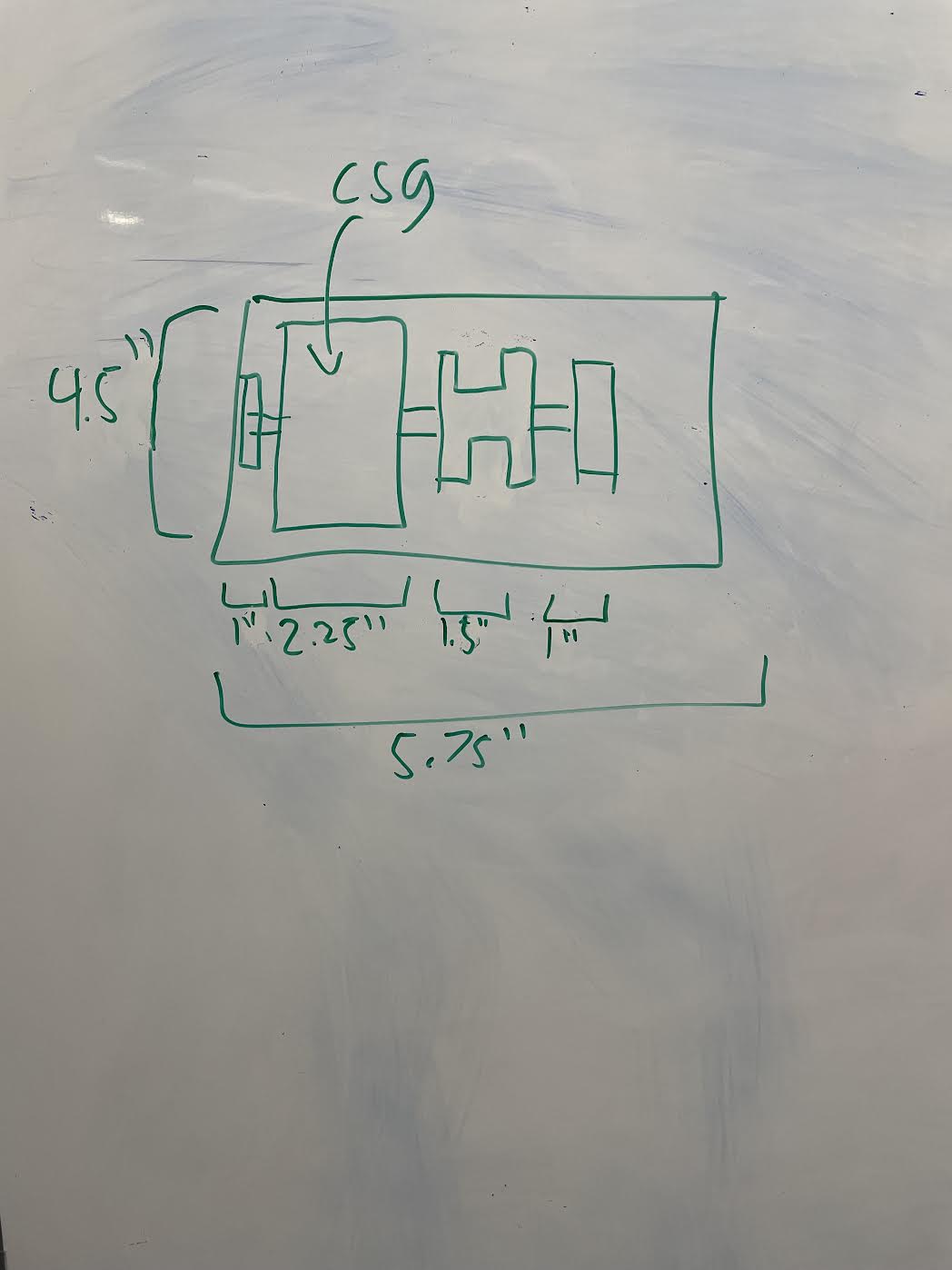
CSG sketch.
-
Pulley system sketch.
-
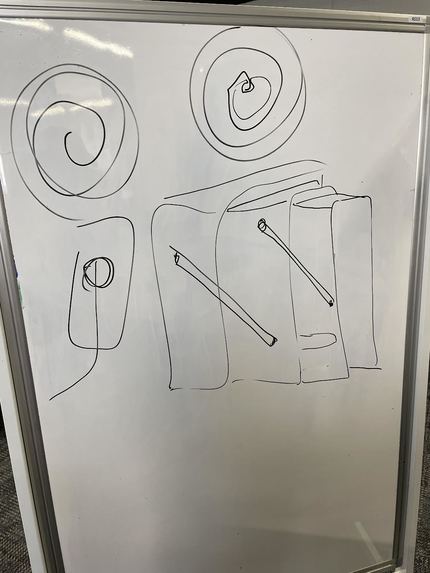
Shock absorbers sketch.
-
Concept for rail break sketch.
Inspiration
Our design was initially inspired by an associate of ours who is currently training to be an EMT. While training as an EMT they have gone on several runs to help people. One of the biggest hinderances they face is operating on the patient while buckled into their seat. OSHA requirements mandate that personal are strapped in while driving but this hinders their freedom to operate on the patient and sometimes they just don't even wear the seatbelt so that they can operate. The design is made in response to this dilemma so that the operator can still move but is securely fastened incase of sudden jerks or an accident.
What it does
The platform, otherwise known as ESOAP (Emergency Services Operating Articulating Platform), is in effect is a backpack on rails. The rail system on the back of the product is meant to allow the platform to move horizontally across the ambulance wall and has a accelerometer to track any jerks so that a breaking system can be applied. On the platform there is are three linear extender blocks that allow the operator to move backward and forward with a difference of roughly 2ft. The extender is connected to a swivel that allows the bottom of the backpack to rotate a little more than 45 degrees in either direction. Another rotational unit is also added from the bottom of the backpack to the top of the backpack allowing the operator to bend over as much as they need. Besides the accelerometer there are no electrical parts meaning the system is free to move from normal human movement. However, in cases of sudden movement there are several mechanical stops that prevent movement including a accelerometer break, pulley system, and shock absorbers for linear motion, and CSGs (more explained on them in what we're proud of) for rotation. The goal of all this is to allow the operator to move freely when at low speeds but lock up when at high speeds.
How we built it
We first started out with brainstorming our idea. At the beginning we weren't sure of what the design was going to be besides a moving strap in device. We initially started off with debating between making a moving seat or an exo-suit on rails. The seat had problems with mobility (leaning over and standing) while the exo-suit was too complex for our liking. We ended up compromising on the backpack design as a blend of the two to increase mobility and simplicity. After that we created a detailed sketch on a whiteboard and started assigning parts (this is whiteboard_# images in our . We decided to work from opposite ends and meet at the middle meaning Paul started working from the rails to the linear extender while Connor started from the backpack until the swivel joint. Each of us started doing more detailed sketches of our parts until they were good enough to CAD. Once we were ready we used Onshape to start CADing. Paul started working on the rail system (including the accelerometer breaks), linear extenders, and back plates while Connor worked on the backpack structure, rotational joints and swivels (including their rotation breaks which we called CSGs), and the pulley system (which had a CSG attached). Once we we're finished we integrated the design between the swivel and linear extender and used NX for the renders.
Challenges we ran into
Main challenges we ran into were with the enormity of the scale of the project. For us as a two man group doing a CAD with four moving parts and six sub assemblies required a lot of time and would have a lot of trouble with integration. To ease integration we separated the CAD in half (as stated above) having each person work on half of the project and then only integrating at the small middle section.
Accomplishments that we're proud of
One of the big things that we are proud of is the CSG or Centripetal Stop Gear component. The component is a rotation stopper that works by being a drum spinner with four pins inside of it. Normally the pins are held inside by compressive springs preventing them from hindering the CSGs movement, however, at high speeds the centripetal force overcomes the springs causing them to shoot out and catch on to objects preventing the rotation. The design was also versatile enough that it was able to be used in three separate parts including the pully system, the swivel, and the rotation joint between the upper and lower parts of the backpack.
What we learned
Mostly we learned how to work with sheet modeling in Onshape (which we both didn't have as much experience with) and integrating off-shelf parts with custom models while keeping a budget (spreadsheet is below and total is under $10,000!).
What's next for Emergency Standing Operating Articulating Platform (ESOAP)
Mostly simplification and cost reductions on the parts to try and make it more affordable (hopefully under $5,000 in the future). Major parts for redesign would probably be the CSG and the pully. We also would probably start collaborating with professionals who manufacture ambulances to see how we could integrate our product (main things to talk about would be reinforcement of the walls and making sure we don't cover any important storage spaces).
Built With
- nx
- onshape

Log in or sign up for Devpost to join the conversation.