-
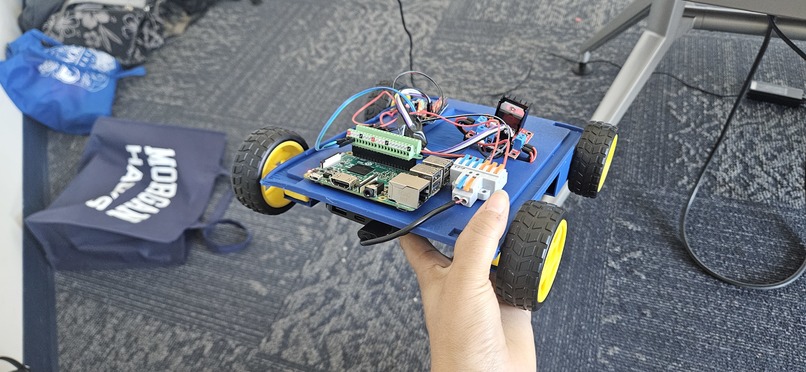
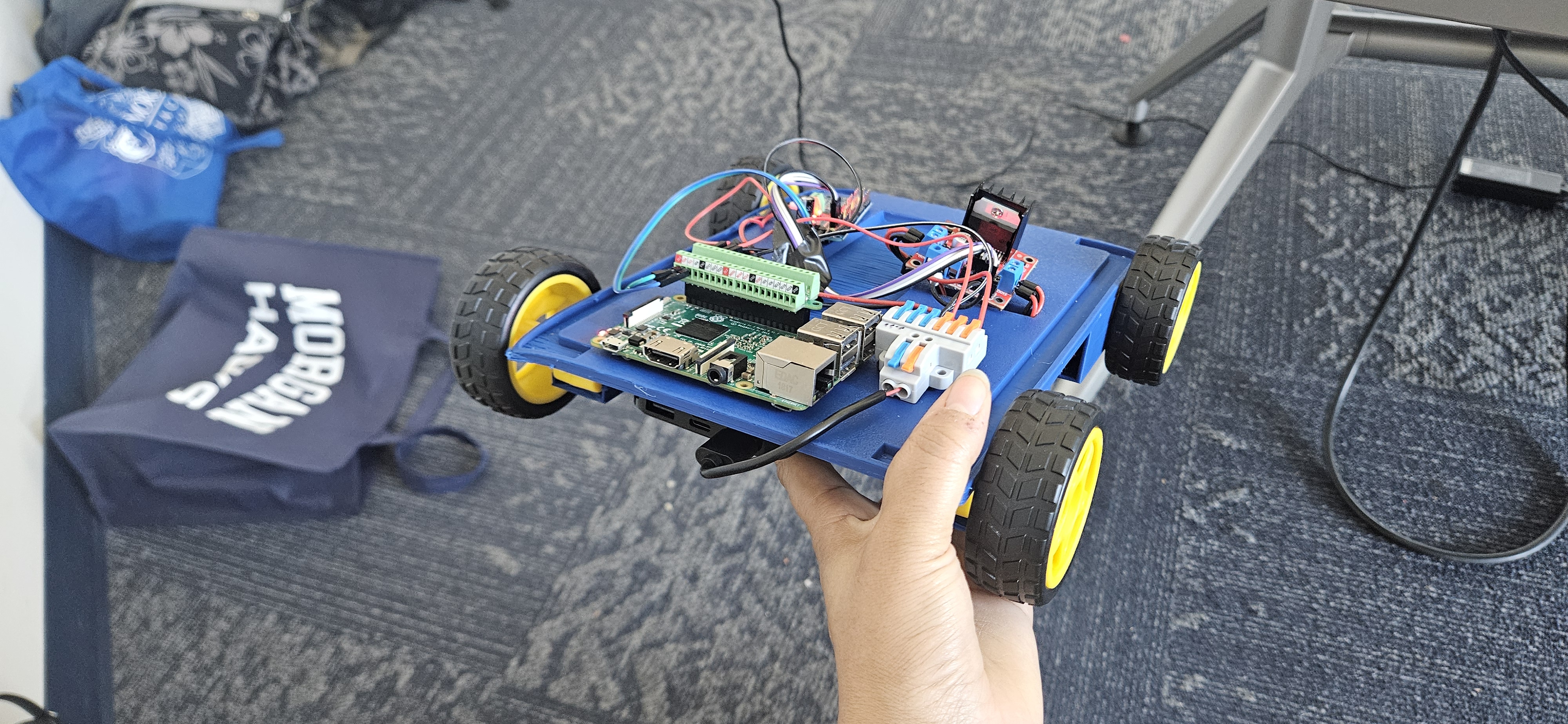
Our robot
Inspiration
We believe that as technology grows so does our capability of helping one another. With wild fires becoming more common and general search and rescue aid always being needed we wanted to provide a platform that aids in these missions.
What it does
Aids in search and rescue missions with a focus on Urban rescue.
How we built it
Using onshape,3d printing, raspberry pis, and a few sensors we manufactured a ground robot capable of monitoring hazardous areas and providing aid to those in need.
Challenges we ran into
- 3d prints failed alot. There may have been oil on the bed even after cleaning it with isopropyl alcohol.
- Did not set up our virtual environment for python correctly. Made it hard to install packages.
- Camera is struggling to stream within the code we have but works fine otherwise.
- Motor drivers were not working.
- One of the sensors we were going to use turned out to be analog
Accomplishments that we're proud of
- Being able to produce a functioning robot from scratch within 24hrs
- Building better means of management and communication.
What we learned
- When you start a new virtual environment for python use this line "python3 -m venv myenv --system-site-packages"
- You don't always get a prompt at hack a tons
- it's good to bring your own equipment
- opencv is what most people use when doing video identification
What's next for Emergency Mobile Bot for Extraction & Recovery (E.M.B.E.R.)
- Furthering some of the core functionalities we want out of this robot
- Adding modularity so it can be more versatile
- Swarmafacation
Built With
- 3d-printing
- bamboo-studio
- buzzer
- copilot
- github
- motion-detection
- motor-control
- opencv
- picamera2
- pwm
- python
- raspberry-pi
- soldering
- terminal

Log in or sign up for Devpost to join the conversation.