-

The full glove with the button ergonomically positioned
-
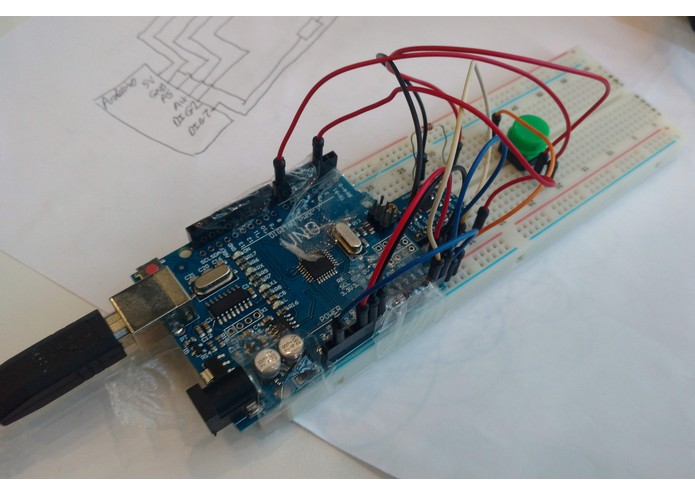
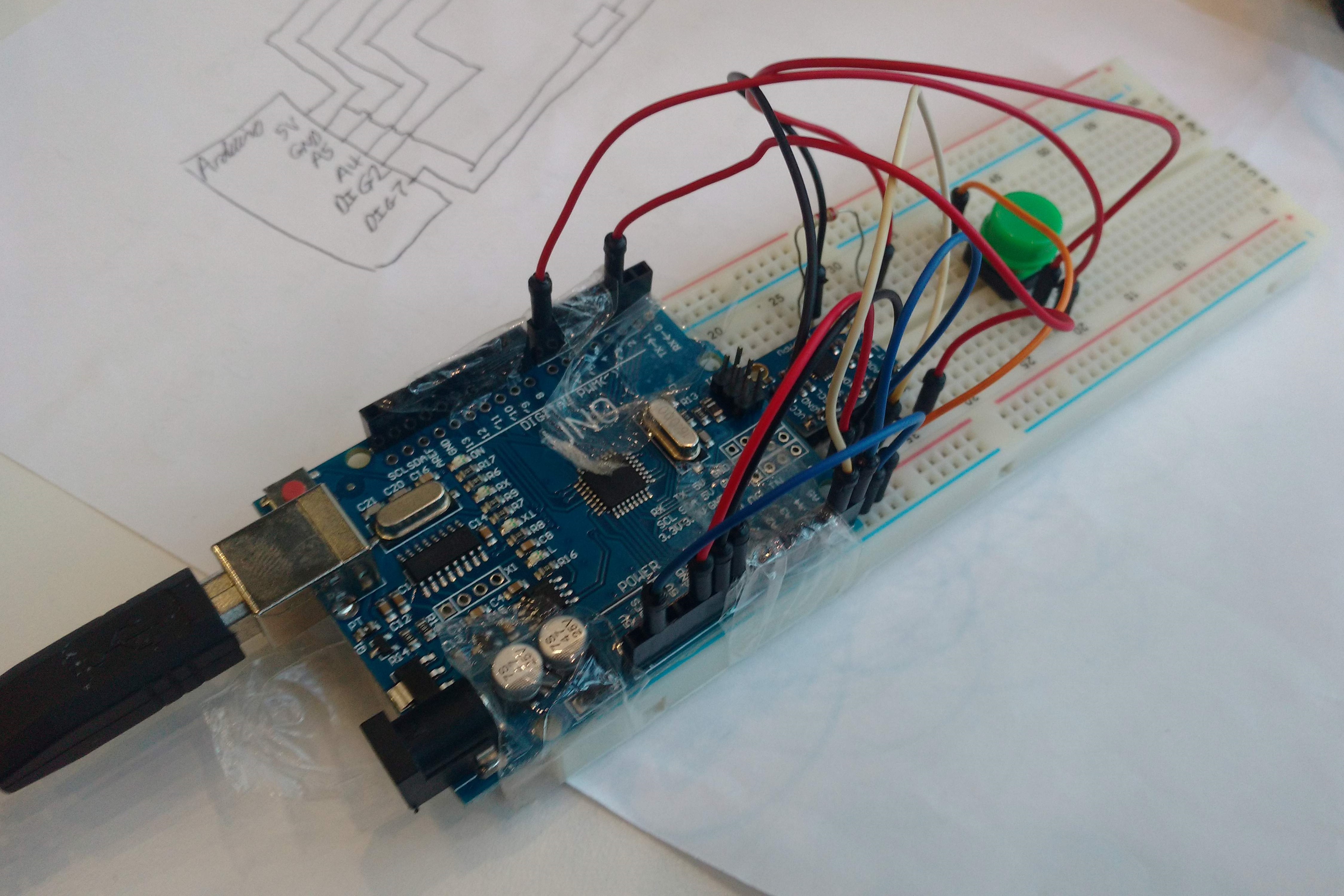
Initial hardware prototype on the breadboard

We're submitting our project for the following challenges: Bloomberg Best Tech, Web Applications UK engaging young programmers, Domain.com best domain and AutoTrader UK making the world a better place.
Inspiration
We love using hardware to make cool hacks and wanted to find an interesting way of using our Arduino and Inertial Measurement Unit (IMU). IMUs can sense motion in various different ways and inspired by great games of beer pong with our friends we decided to make an electronic version with the IMU as the main sensor. This was also a great way of combining all our skills in mechanical and electrical engineering and computer science.
What it does
Electronic Beer Pong is a fun game that fuses physical skill with cool electronics and graphics. An accelerometer connected to an Arduino Uno measures the speed of a throw, with a final measurement being taken when a button on the glove is released. The data are passed by USB to a PC, which runs them through some Python code to calculate the trajectory of the virtual ball given the speed of the throw. The trajectory is plotted using matplotlib and overlaid on some fun graphics to encourage competition between players.
How we built it
Firstly we soldered a header to the IMU so we could plug it into a small breadboard with the Arduino Uno. We connected the Arduino to the relevant pins on the IMU with jumper wires, then the Arduino to the PC via a USB cable. Then came a lot of time writing the code in the Arduino IDE and Python, which uses the matplotlib Python library to plot the calculated trajectory of the throw over a background.
Challenges we ran into
We were initially going to use a Raspberry Pi Zero W to interface to the IMU so we could send the data over WiFi, but configuring the Pi to have a static IP address on Eduroam so we could VNC in for programming proved very difficult. We eventually just switched to Arduino to save time, but that also meant having a wired connection back to the PC that plots the trajectory.
Accomplishments that we're proud of
We're proud of quickly coming up with an idea for our hack and successfully using the various skills of our team members to make an interesting solution. With it being our first hackathon for most of us, we're also proud of how much we've achieved in such a short time frame.
What we learned
We learned about the difficulty of connecting devices to Eduroam. Some of the team had their first experience of electronics through connecting up the Arduino and IMU, with others of us learning lots about Python and the matplotlib library. We also learned how to use integration and the suvat equations to work out velocities from raw accelerometer data.
What's next for Electronic Beer Pong
The next steps for our project will be to make a website with a high score system, map targets to real world distances and to add wireless connectivity to the processing computer.





Log in or sign up for Devpost to join the conversation.