
Inspiration
Going to the beach or to a park is our favorite thing to do! But it goes without saying that several public areas are littered and dirtied. The environment is hurt and our beloved vacation spots are consequently damaged. One of the major reasons for this result is that garbage cans are spaced out at large lengths and not conveniently available. So now, instead of bringing the garbage to the cans, we can bring the can to the garbage!!
What it does
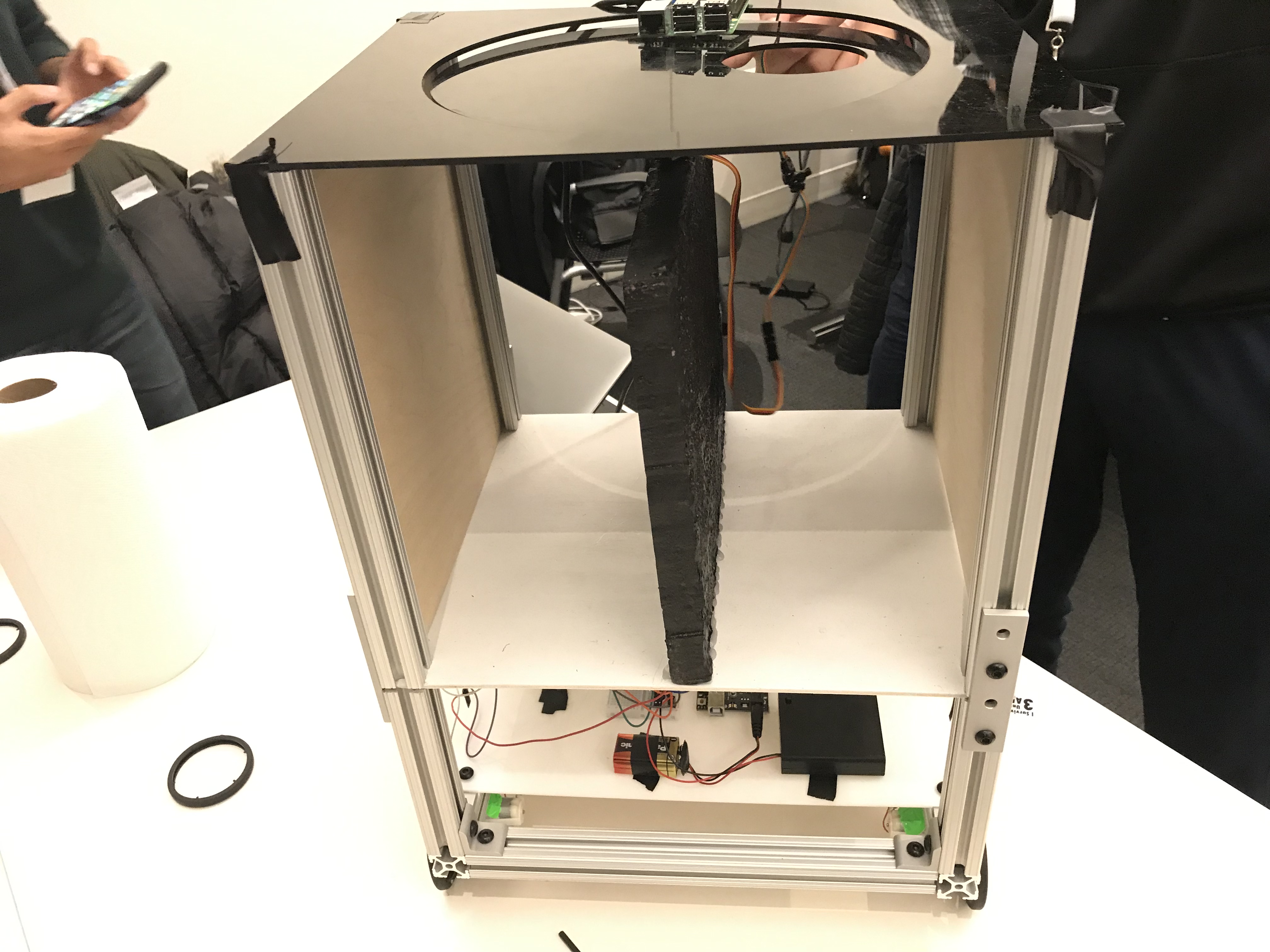
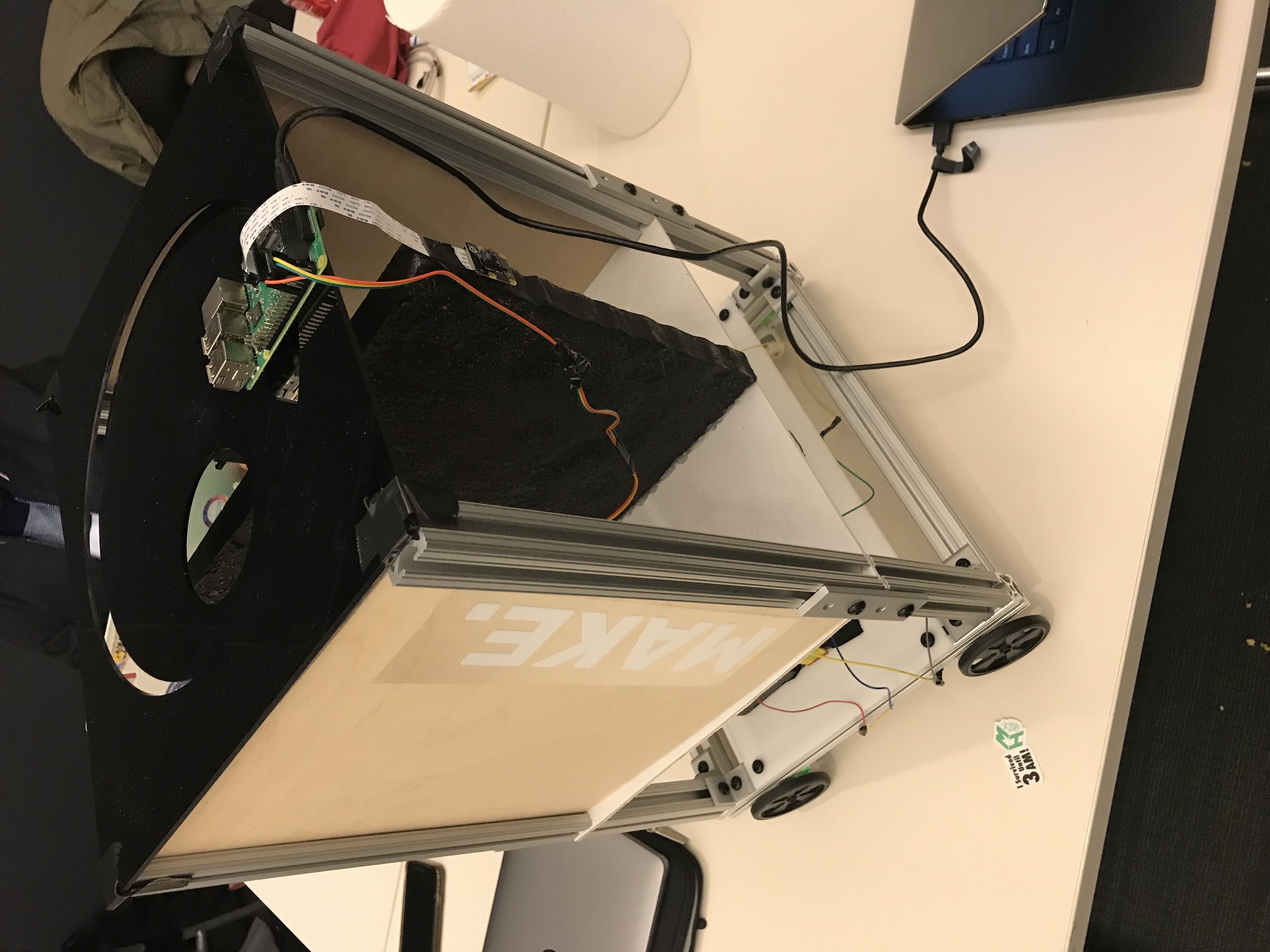
The robot will follow a predefined path of travel within a public location. As an individual places garbage in front of the camera, the system uses image processing to decide and consequently open either the specific, "Recyclable" or "Garbage" compartment. This process will easily sort the garbage and educate individuals on which items of recyclable!
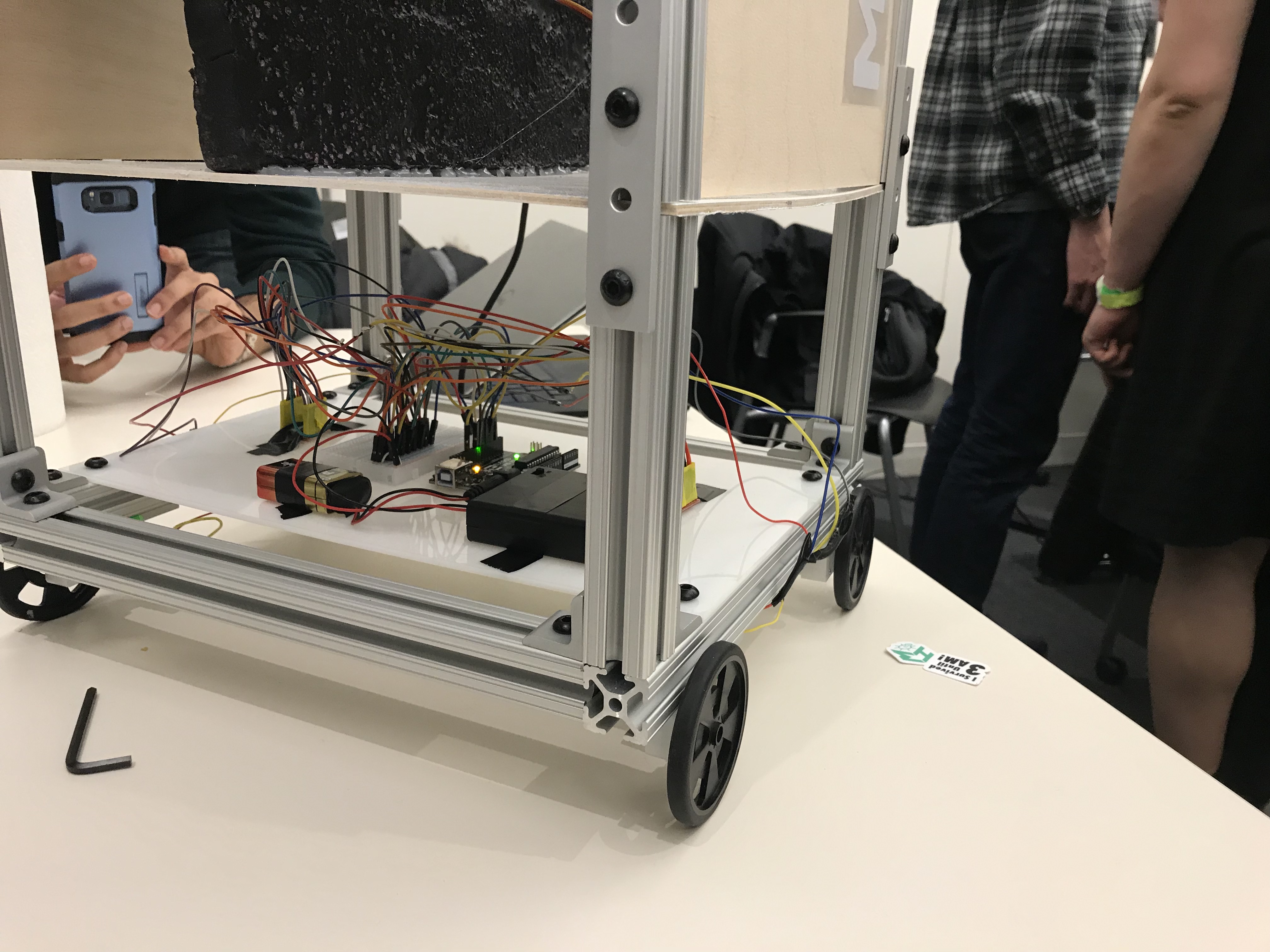
How I built it
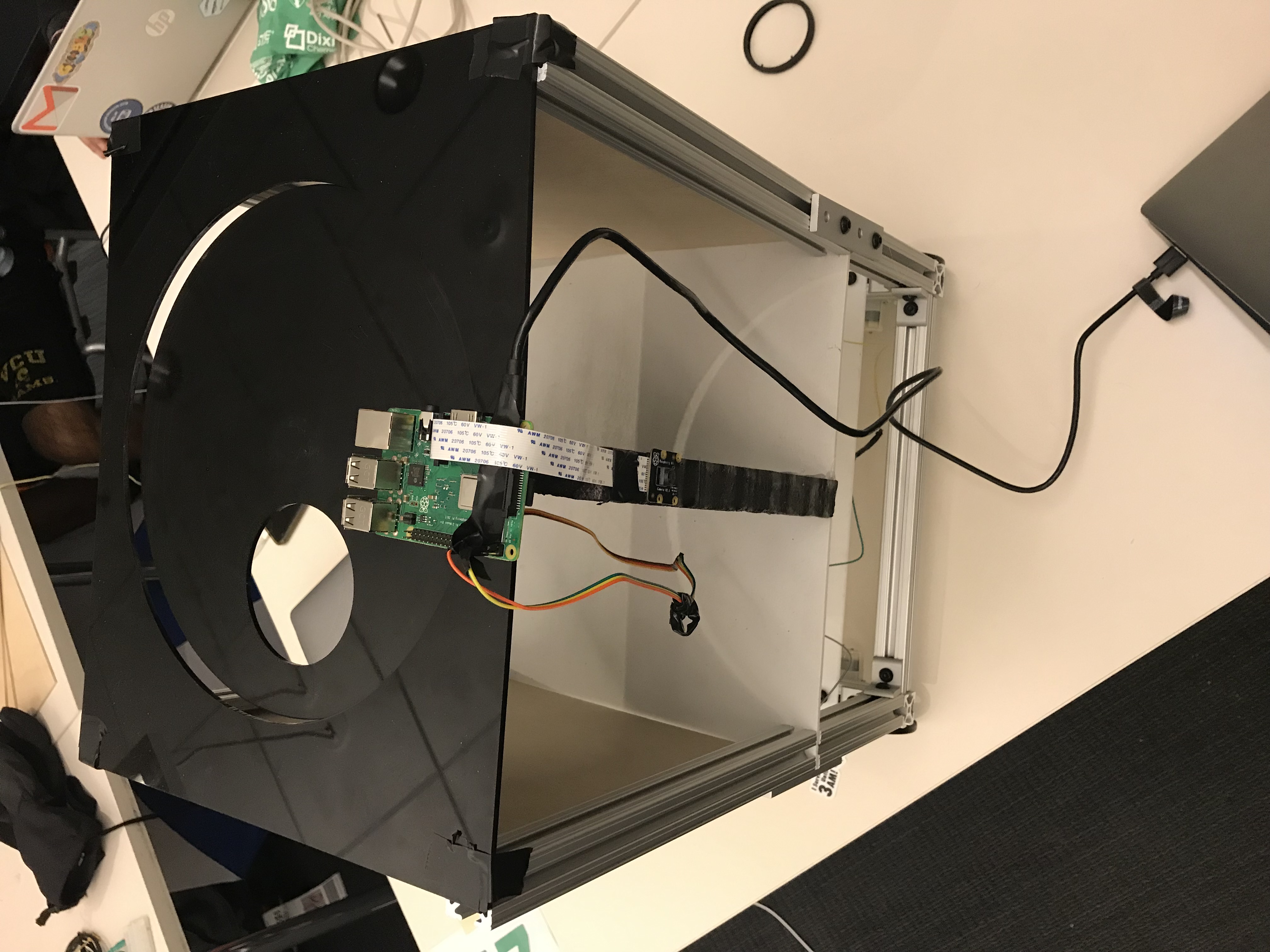
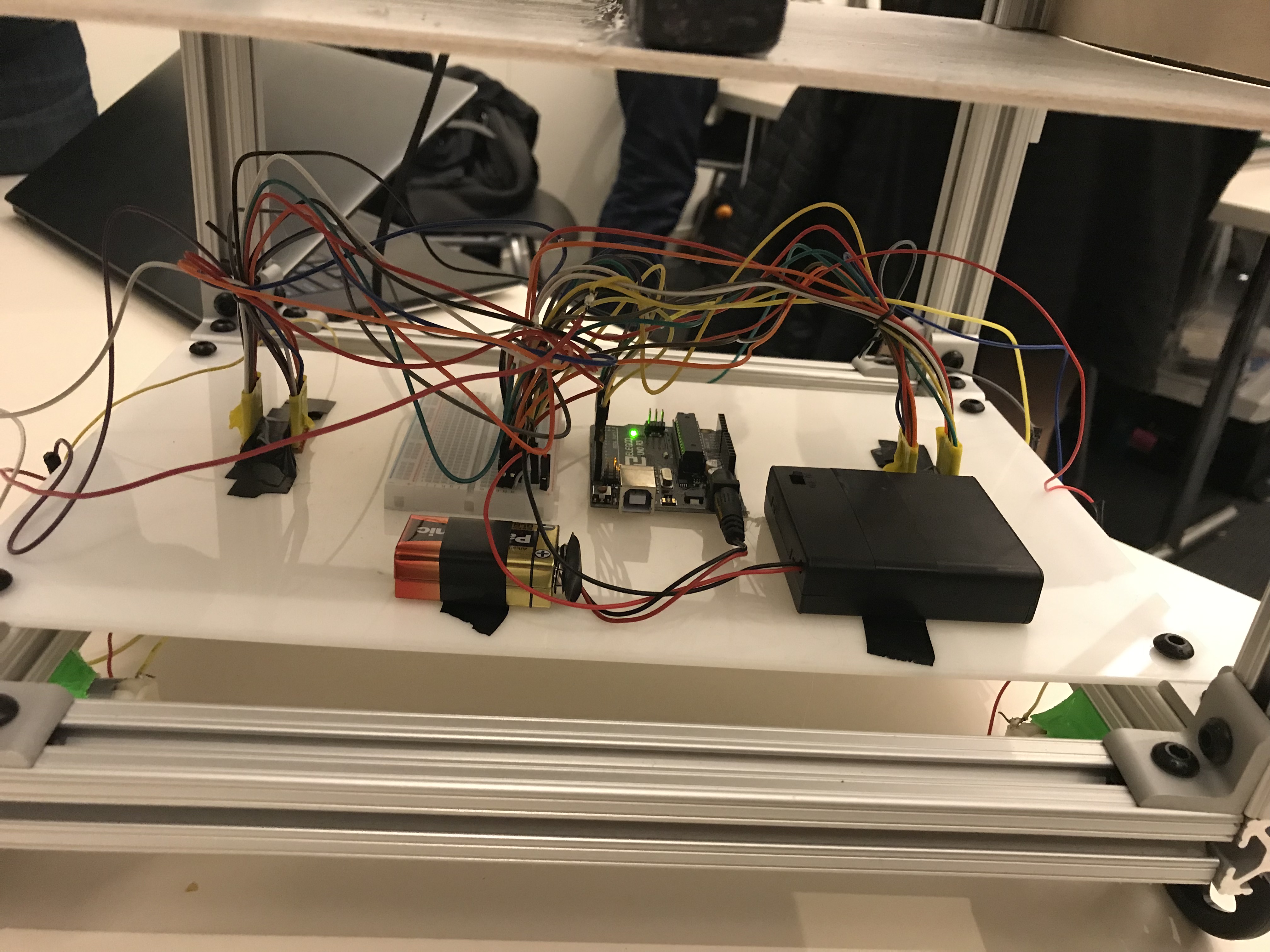
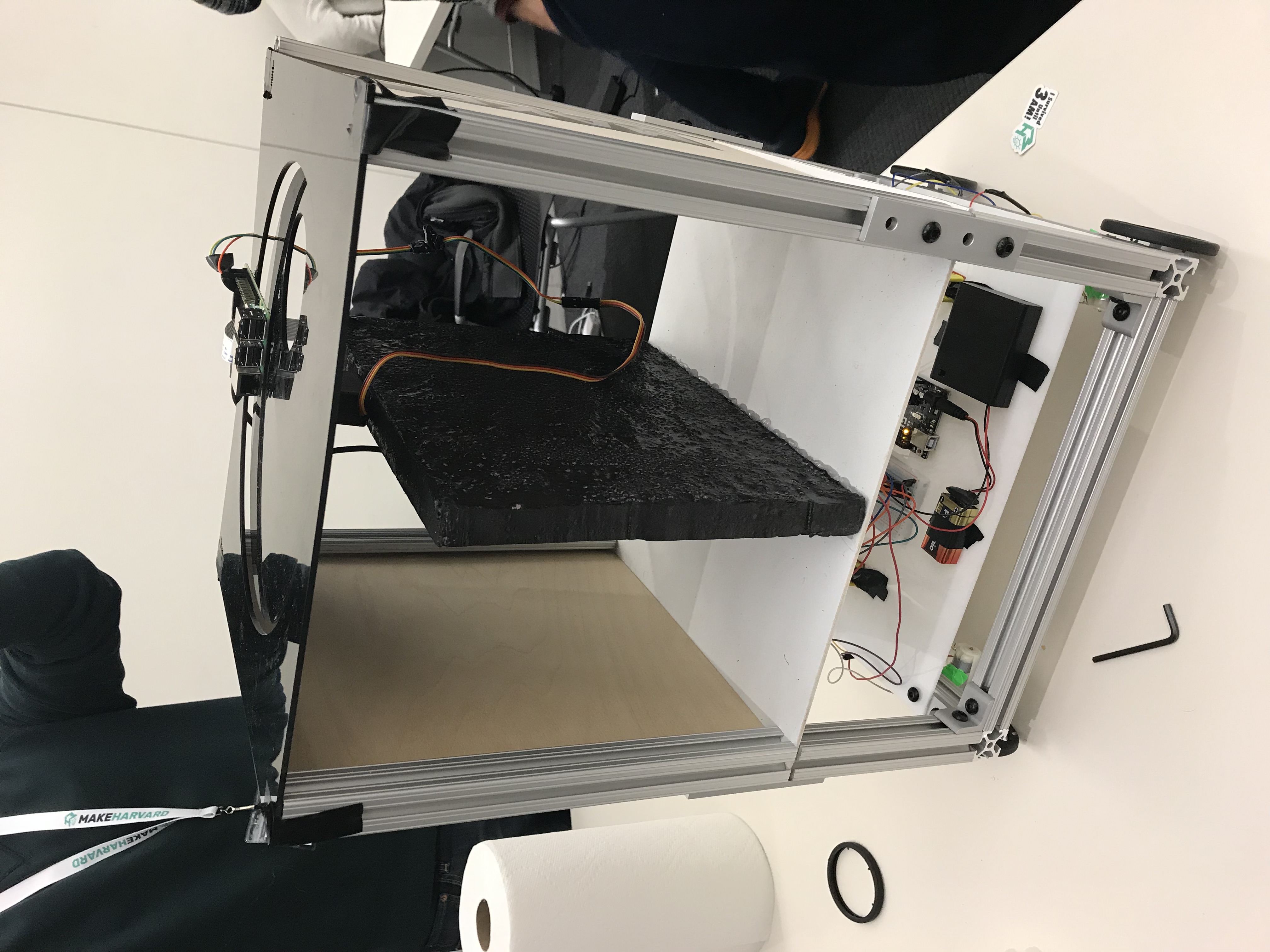
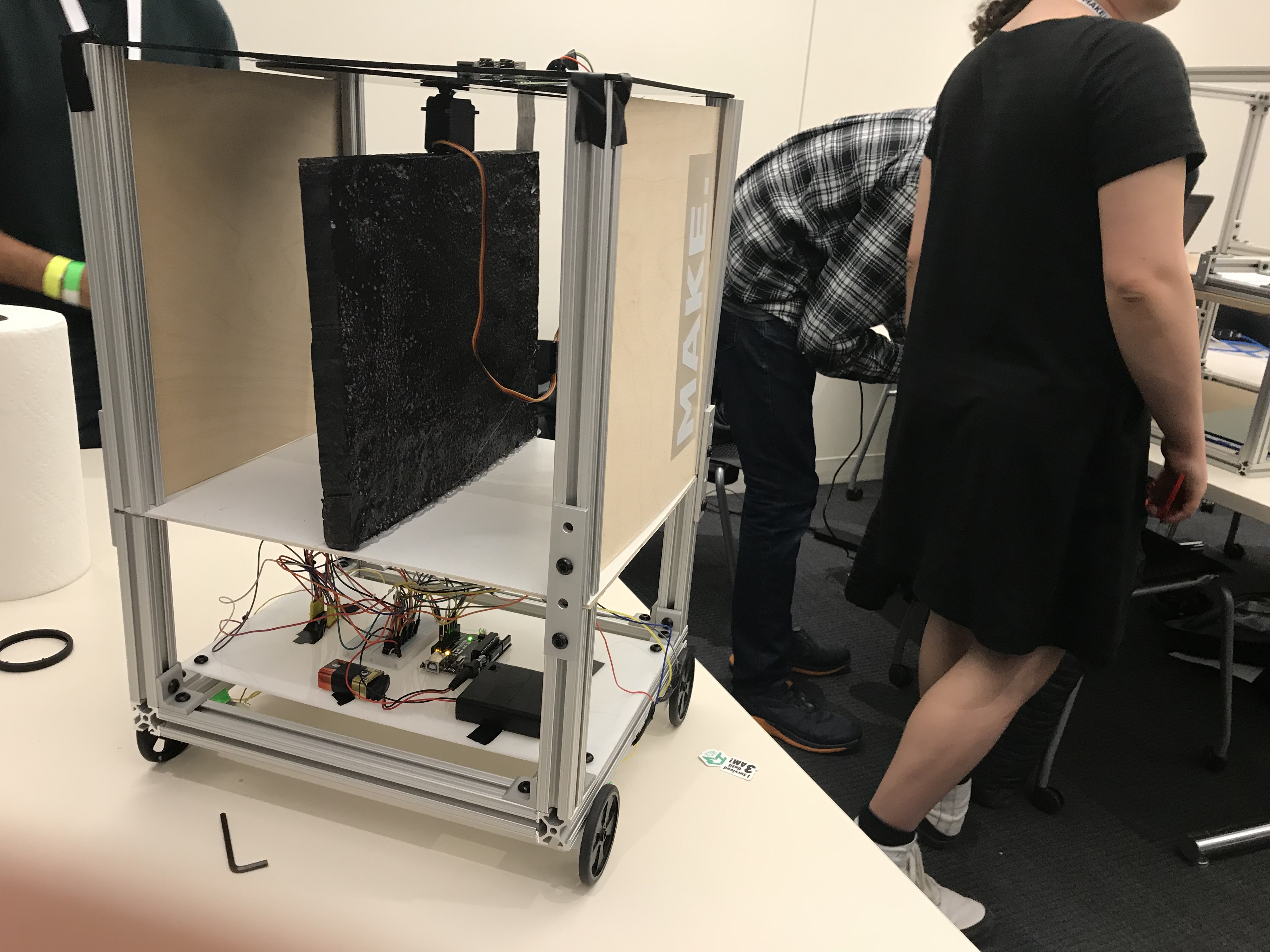
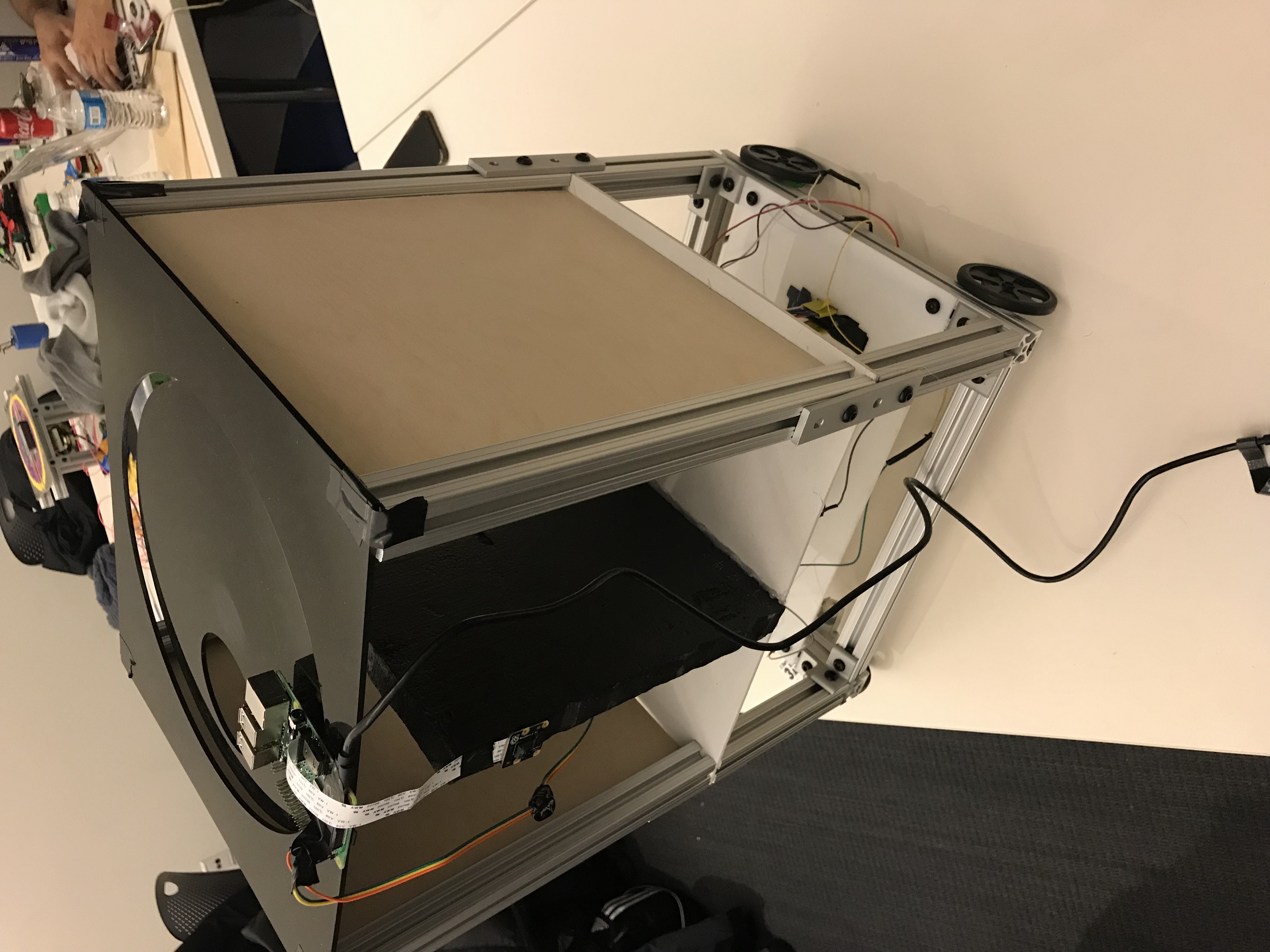
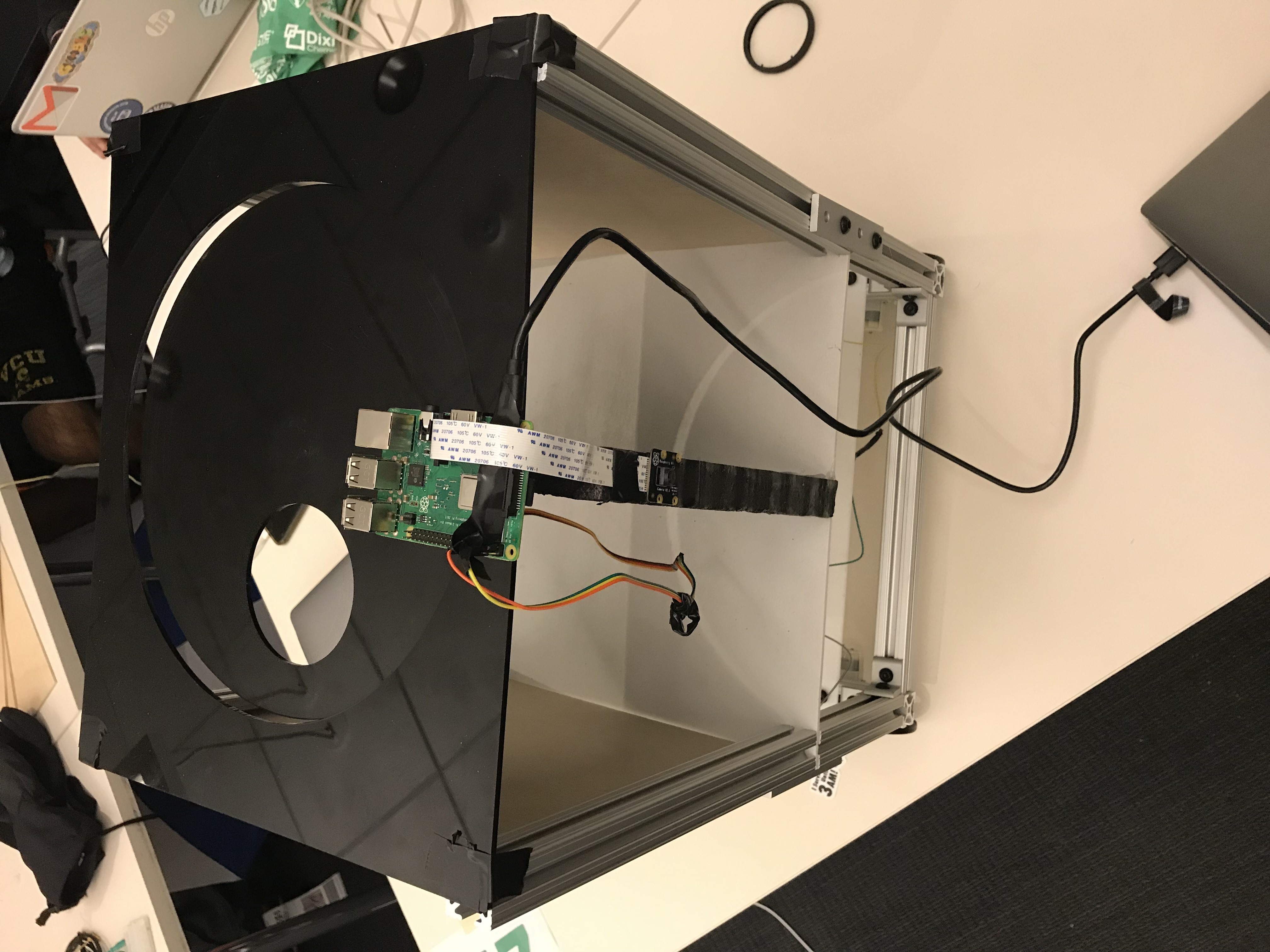
Arudino supported drive train, Raspberry pi camera for image recognition connected to a servo motor turning the upper dial corresponding to the entrance of the specific compartments.
Challenges I ran into
Getting Raspberry Pi to work with OpenCV and configuring/training the model to work with our requirements. Torque calculations for drive train to assure that the wheels can support the high weight.
Accomplishments that I'm proud of
Finishing!! Learning a lot!! Having fun!! Making!!!
What I learned
Image processing, Drive train development
What's next for EasyGreen
In the future, it would be incredible to have a fleet of robots traveling through public locations. A "calling" feature can also be incorporated such that as someone needs a garbage can, they can use an app and call one of the bots to them.
Built With
- 3d-printing
- arduino
- c++
- dnn
- image-processing
- laser-printing
- opencv
- python
- raspberry-pi
- tensor-flow



Log in or sign up for Devpost to join the conversation.