-
-
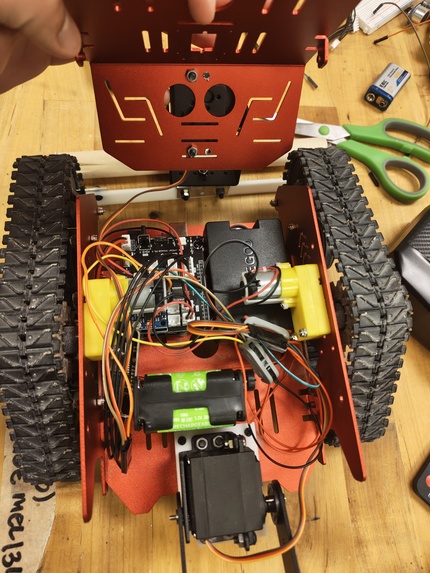
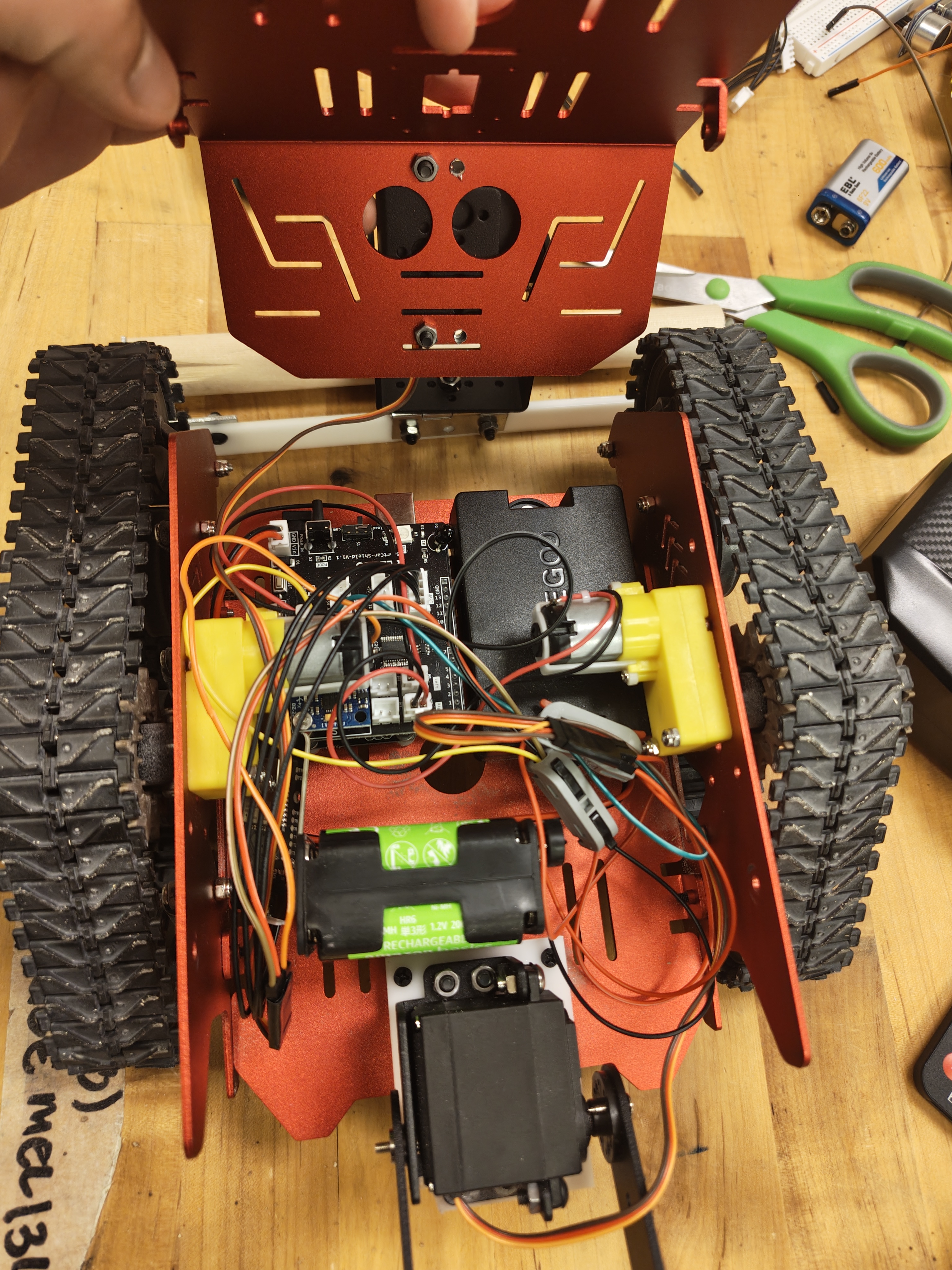
Robot Electronics/Internals
-
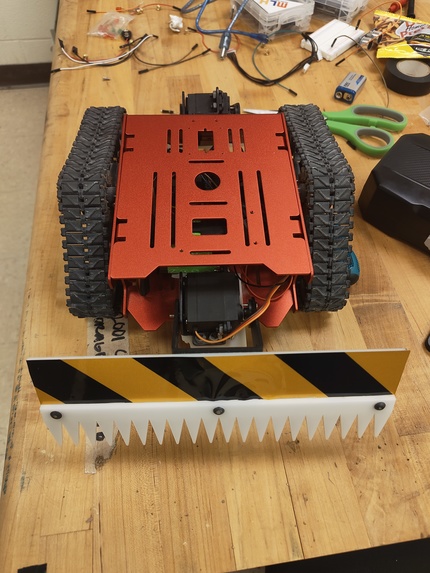
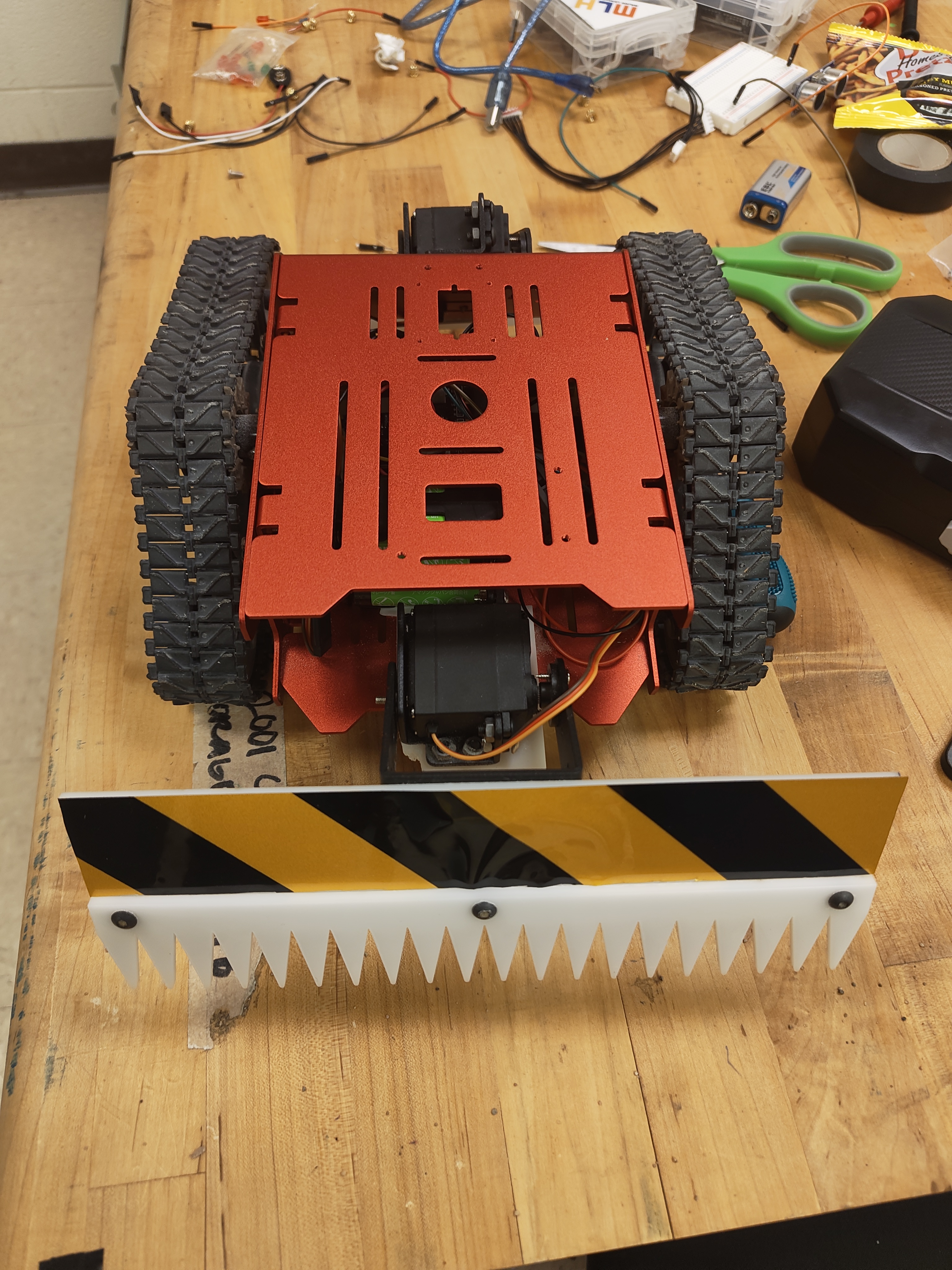
Robot Safety features
-
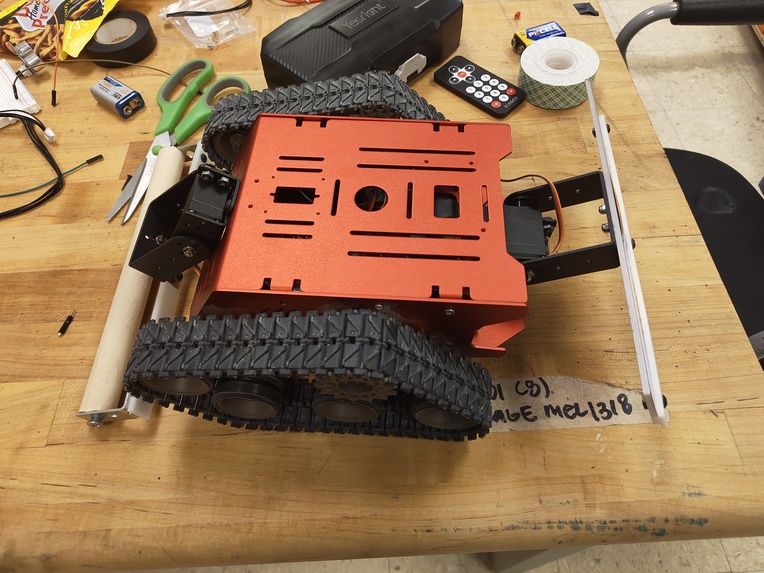
Robot Side View
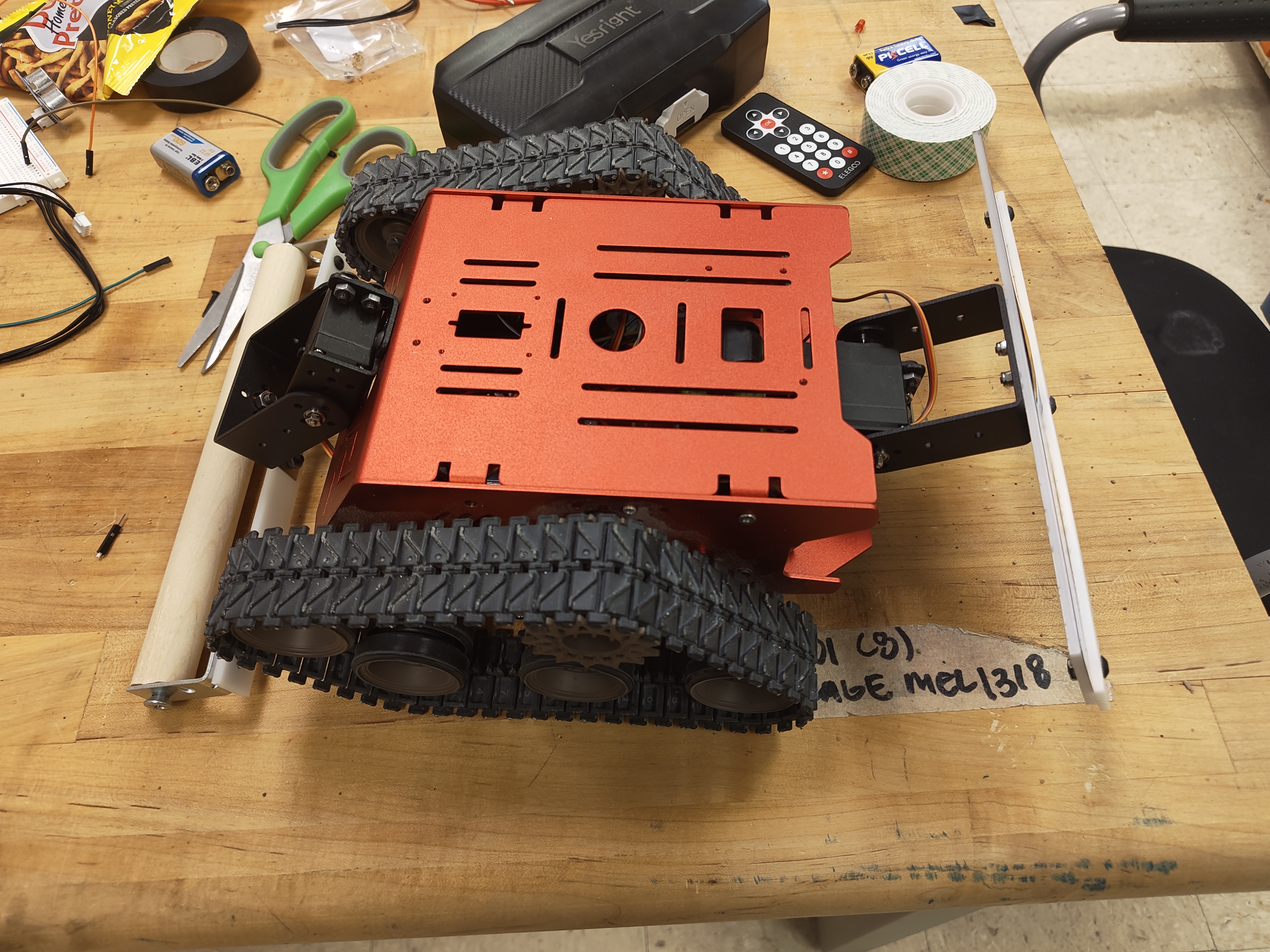
Inspiration
Construction and infrastructure projects rely on precise site preparation to ensure structural stability. Inspired by John Deere’s focus on jobsite efficiency and safety, we aimed to design a robotic system capable of autonomously leveling unknown sand terrain. Our goal was to explore the intersection of mechanical design, embedded systems, and control theory in a practical, hardware-driven challenge.
What it does
Dune & Dumber is a semi-autonomous robotic system designed to flatten uneven sand surfaces. It uses a front raking plough to redistribute material and a rear cylindrical roller to smooth the surface and eliminate wheel tracks. An onboard inertial measurement unit (IMU) provides real-time terrain feedback, enabling adaptive leveling through closed-loop control of the plough and roller mechanisms.
How we built it
We used the Elegoo Conqueror robot kit as a mobile base and augmented it with custom mechanical and electrical subsystems. The leveling mechanisms were fabricated from laser-cut Delrin for structural rigidity and low friction, while early prototypes were 3D printed to rapidly iterate designs. Actuation was achieved using MG996R servo motors powered by a dedicated 7.2V supply.
An Arduino Uno served as the central controller, interfacing with a TB6612 motor driver for locomotion and an MPU6050 IMU for orientation sensing. A proportional feedback controller with deadband and low-pass filtering adjusted the plough and roller angles based on real-time pitch measurements. The system operated in a hybrid control mode, combining manual driving via IR remote with automatic leveling correction.
Challenges we ran into
One major challenge was preventing the robot from stalling or becoming trapped in steep craters. Early pushing-based designs caused excessive compaction and high resistive forces, leading to frequent immobilization. Mechanical tuning of blade geometry and servo authority required extensive calibration to balance penetration depth and forward traction. Additionally, sensor noise and vibration from granular interaction complicated stable closed-loop control, requiring filtering and deadband implementation.
Accomplishments that we're proud of
We successfully designed and implemented an actively controlled leveling system capable of significantly flattening uneven sand terrain while removing wheel tracks. The integration of IMU-based feedback control into a low-cost robotic platform demonstrated effective closed-loop mechanical regulation. Our iterative design process resulted in a robust and adaptable leveling mechanism that performed reliably under varied terrain conditions.
What we learned
This project reinforced the importance of soil–tool interaction mechanics, highlighting the effectiveness of raking and shearing over direct pushing in granular environments. We gained experience in closed-loop embedded control, servo calibration, power system design, and rapid mechanical prototyping. Most importantly, we learned how to balance theoretical control strategies with real-world mechanical limitations.
What's next for Dune & Dumber: The Sand Leveling Robot
Future work includes implementing full autonomy through onboard vision-based terrain mapping and path planning, integrating higher-performance compute platforms, and developing advanced smoothing mechanisms such as helical rollers. These improvements would enable higher precision, improved surface consistency, and fully autonomous operation across unknown environments.


Log in or sign up for Devpost to join the conversation.