-
-
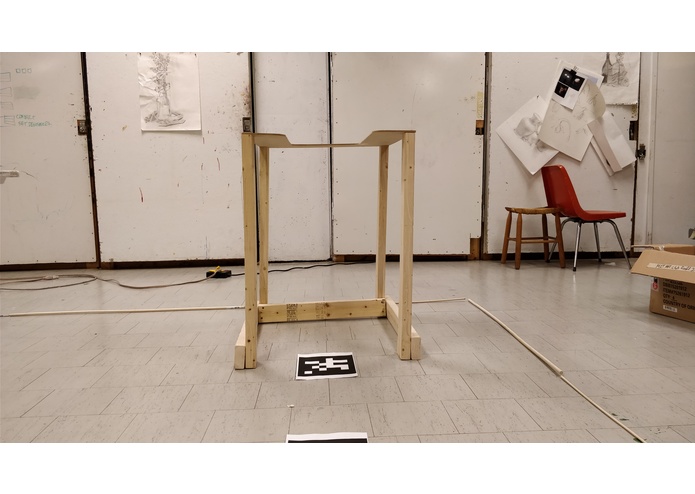
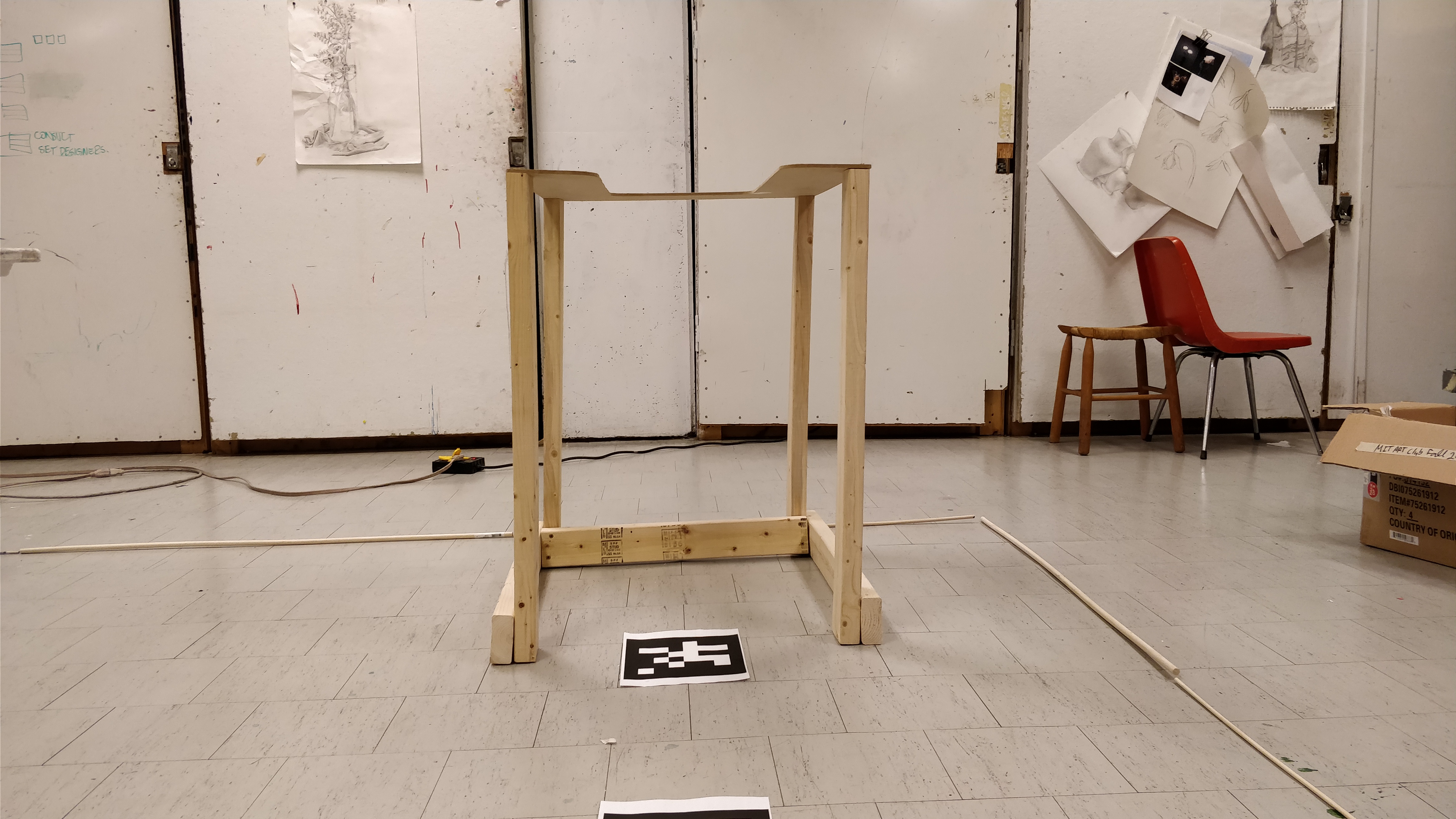
A close-up of the table our bot docks into.
-
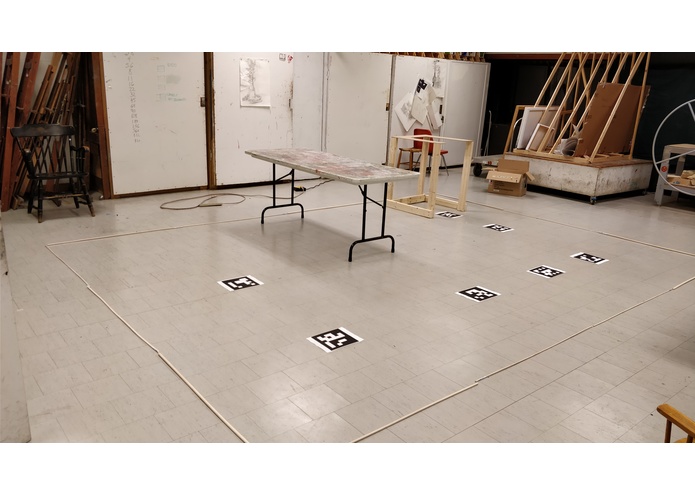
Our "restaurant" setting!
-

A close up of one of our wheels.
-
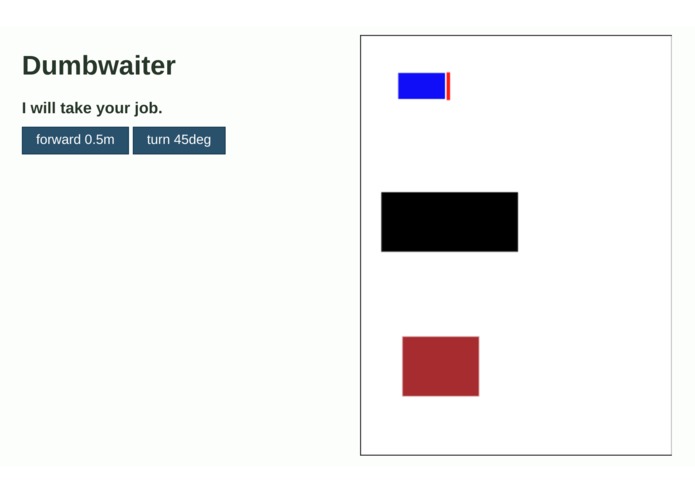
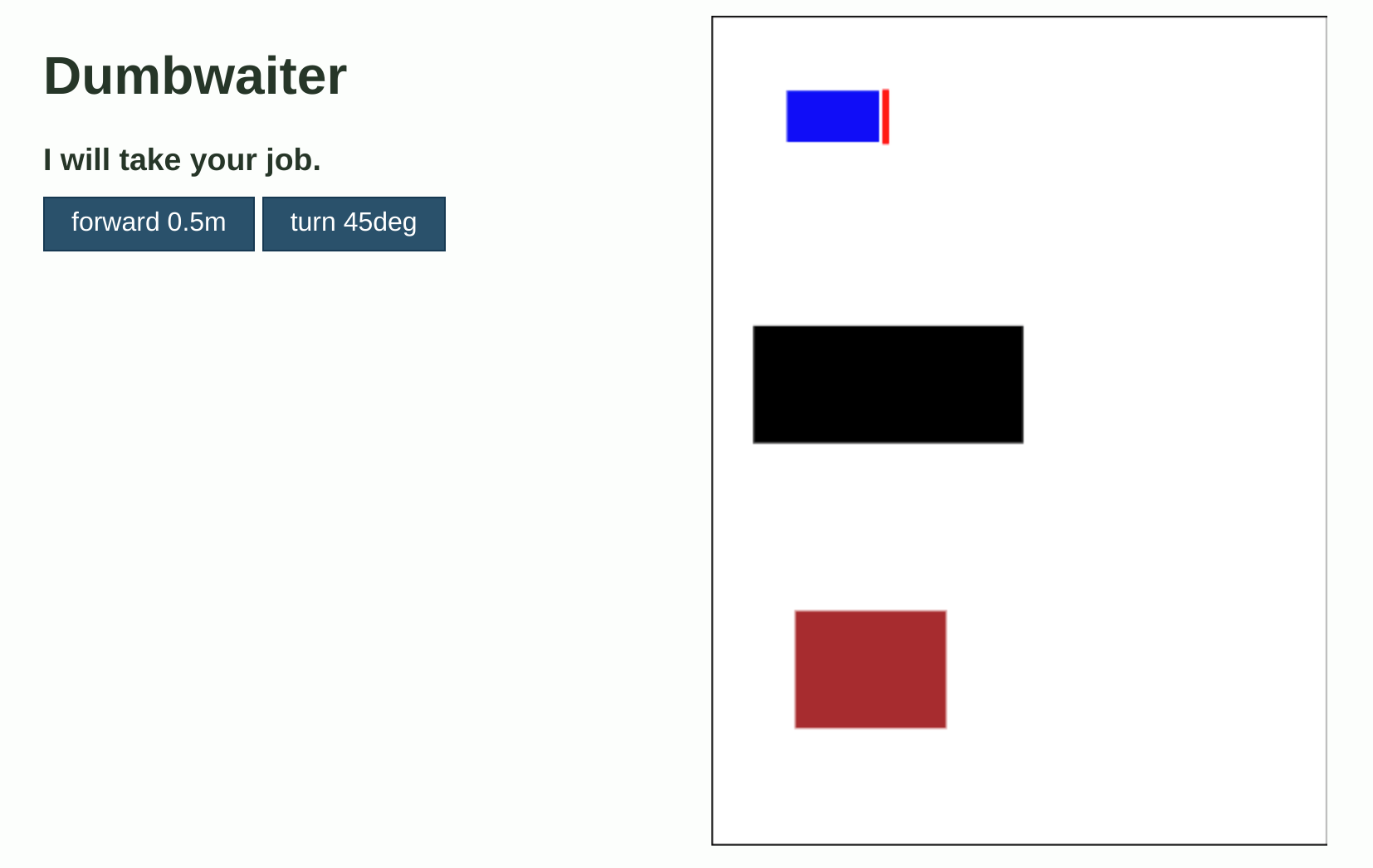
A sneak peak of our interface. The map updates as the robot (blue) moves towards the brown table.


Demo: http://youtu.be/yij4h8gj6AU
Inspiration
Jobs 20 years from now are going to look totally different from jobs today. As robotics and AI continue to progress, more and more low-skilled labor jobs will disappear. We wanted to see whether we could use today's technology to create an autonomous waiter: a "dumbwaiter".
What it does
"Kitchen staff" put food on our bot, which then proceeds to make its way through the "restaurant", finding the corresponding table and delivering the food.
How we built it
We use NVIDIA Jetson TX2 to perform all of the necessary computer vision to localize the bot in its environment. We build a custom robot in the shape of a table that can move around a fixed environment and localize itself using april tags. We used 80/20 and plywood to construct the robot itself.
Challenges we ran into
We had a lot of problems obtaining motors that were strong enough to move our robot. We also ran into trouble designing an energy solution that could power all of our hardware at the correct amperage.
Accomplishments that we're proud of
The table looks sick (thanks John).
What we learned
Always read data sheets and do all the torque math BEFORE you build the rest of the bot.
What's next for Dumbwaiter
Smarter localization!! We actually already have code for a localization system that doesn't require april tags on the ground, but we didn't have time to integrate it with the rest of the system.

Log in or sign up for Devpost to join the conversation.