-
-
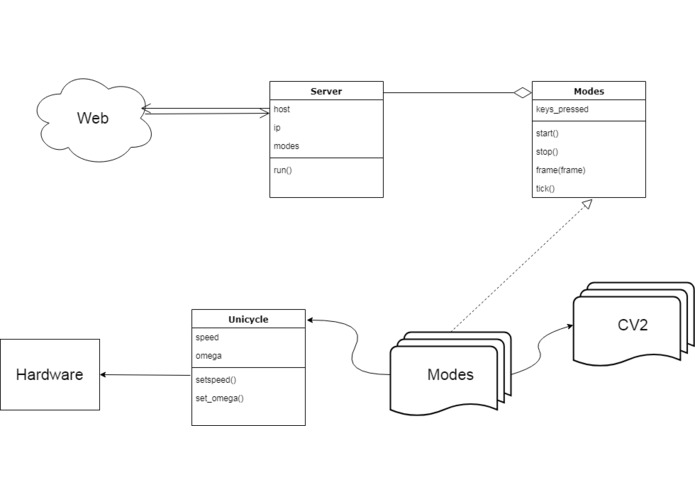
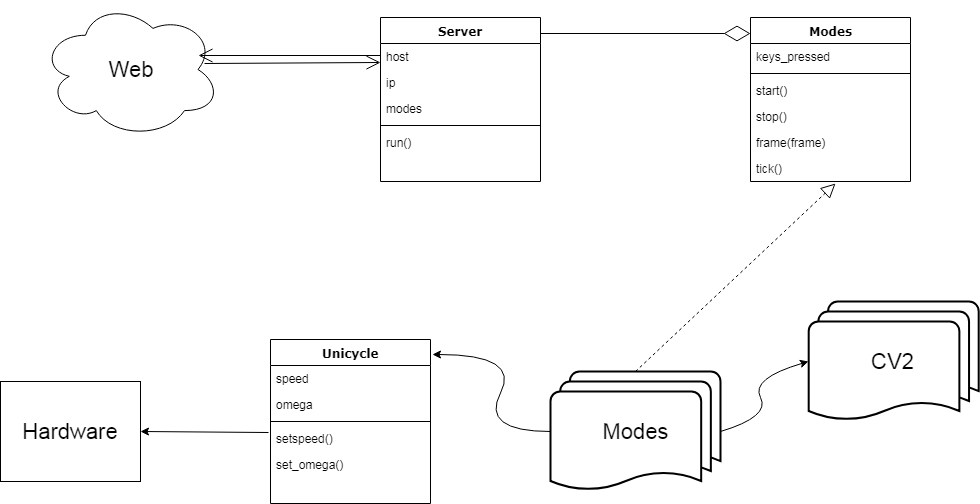
HML diagram
-
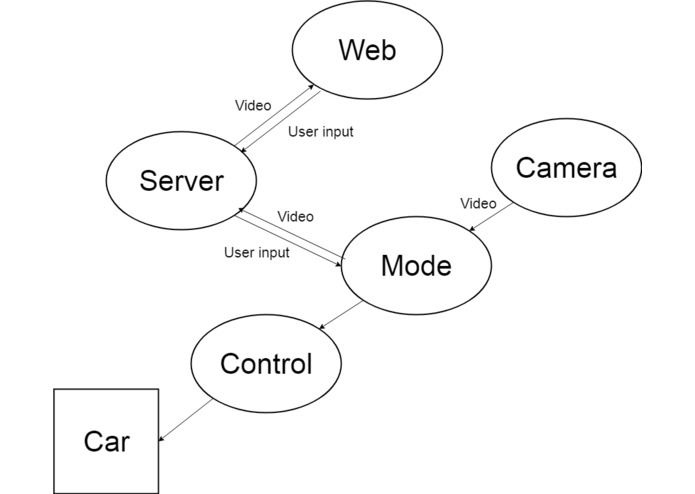
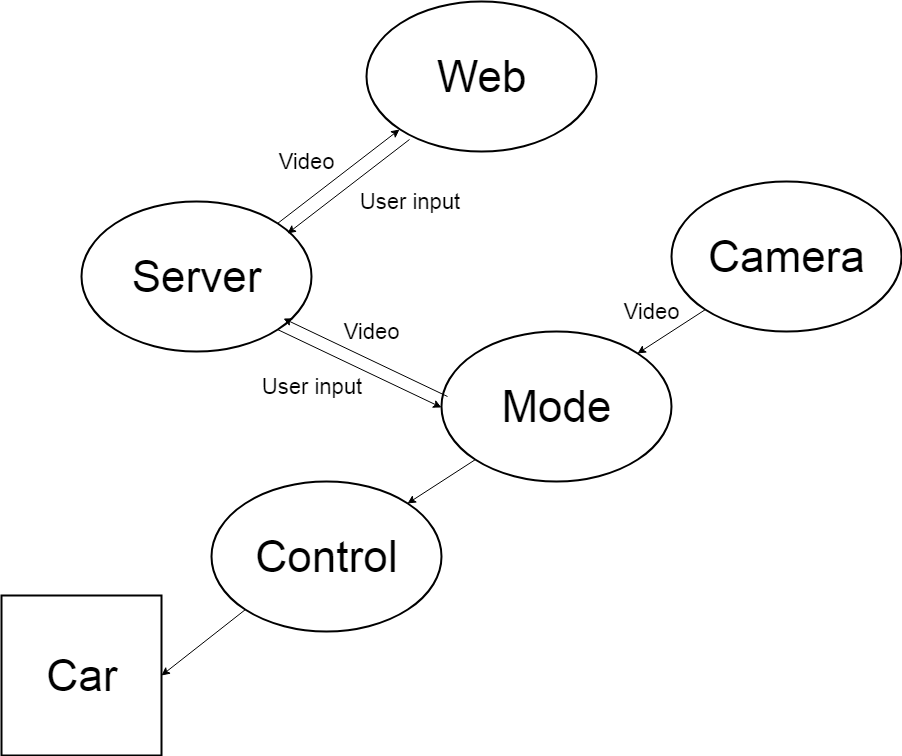
High-level software summary
Duckie Rodeo
Overview
Duckie Rodeo is a web-controlled Duckie Bot that features multiple driving modes. Modes include:
- Default
- Mirror
- Squid
- Drunken
All modes allow users to drive the Duckie Bot remotely using the on-board camera and wasd inputs. The default mode presents the camera's view without modification and translates inputs directly. Other modes uniquely distort the user's view and inputs.
Components
Raspberry pi, motor control shield, 2x DC motors, camera
Refer to flow charts for summary of software.
AdafruitMotorHAT used to drive DC motors.
This project has been set up using PyScaffold 3.0.3. For details and usage information on PyScaffold see http://pyscaffold.org/.




Log in or sign up for Devpost to join the conversation.