Inspiration
Star Wars (especially R2D2), holographic displays
What it does
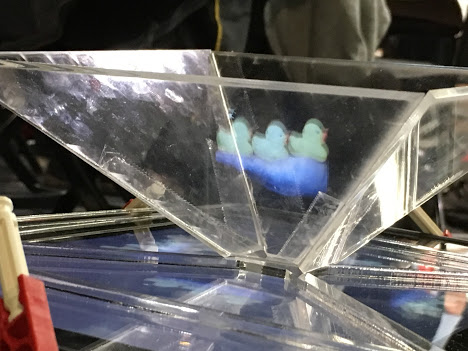
Takes video of its surroundings and displays it real-time on a holographic display
How we built it
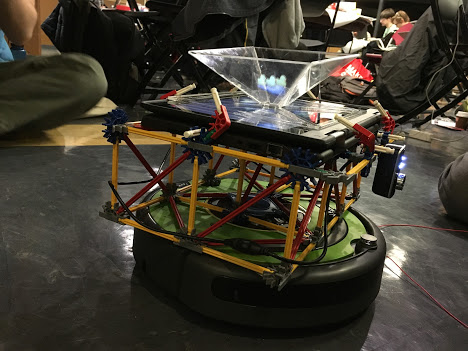
Lase-cut acrylic for the holographic display, a Thinkpad Yoga to process and display the video feed, a webcam to take the video, all mounted with Kinex on a Roomba
Challenges we ran into
The Roomba doesn't have a standard API, so it was frustrating to work with. We wanted to use a Kinect instead of a webcam, but that was also frustrating to work with. Windows doesn't respond well to some necessary packages for our project, so we installed Ubuntu.
Accomplishments that we're proud of
Having the real-time holographic display working without many hiccups.
What we learned
Kinect is hard. Roomba is hard.
What's next for Duck2Ling2
Using a Kinect to filter the video based on a depth map so that the real-time images focus on the foreground. Improving the Roomba control algorithm.
Built With
- kinex
- python
- roomba

Log in or sign up for Devpost to join the conversation.