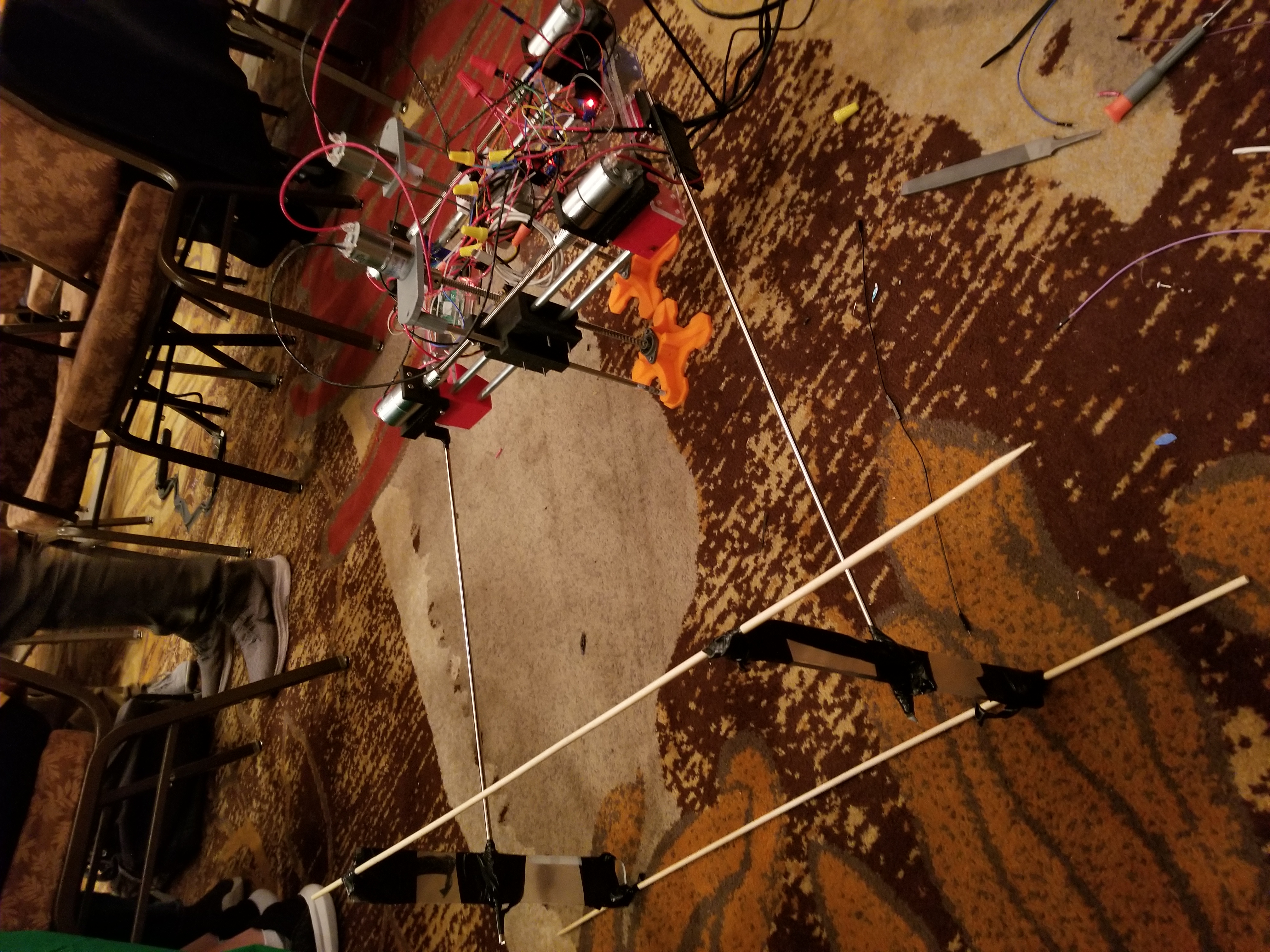
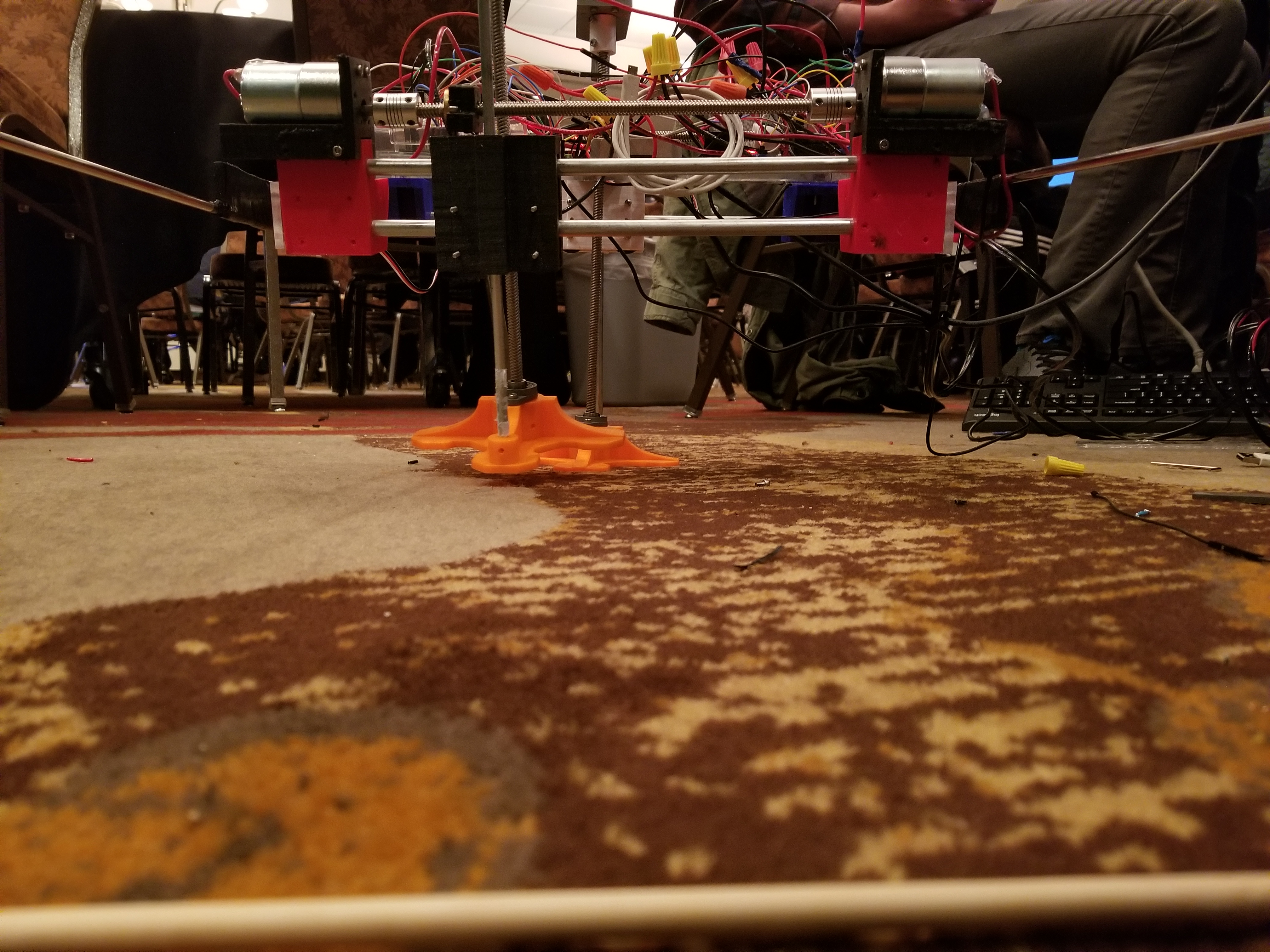
The entire robot was designed and built in Fusion 360 before any physical construction was done. This required an enormous about of prep work because our vision involved 3D printing many parts of our robot. Fusion 360 was a new software to all of the members of our group, and as we finish Duck Foot each member of our group feels comfortable with the software! As we began construction, problems came at us faster than a flock of hungry ducks being fed at the pond. Our biggest problem was trouble with the change in climate and it's effect on our prints. There was incredible amounts of warping in our original parts. However, we didn't give up! The race to research a solution went faster than a migration flight south! We discovered that the cold air effected the evenness of the cooling of the part and to counter this, we would need an enclosure. Ideas were suggested and another problem was solved! We are proud of what Duck Foot is able to do as we complete the hackathon! As we move forward our goal is to redesign it to be a true balancing walking robot! We believe that the solution can and will be found through better mechanical and programmed systems. We are grateful for all of the practical experience that we gained over the course of Operation Duck Foot!
Built With
- posix
- python
- rasberry-pi
Log in or sign up for Devpost to join the conversation.