


Inspiration
We were excited to combine our dominant skill sets together: mechanical design, and embedded systems. In the end, we were unable to achieve our original goal of building a mechanically stabilizing webcam, though we were successful in building a dual axis controllable servo platform.
What it does
Given some user input: either some angle, or relative motion, the servos will move the camera in the desired location.
How I built it
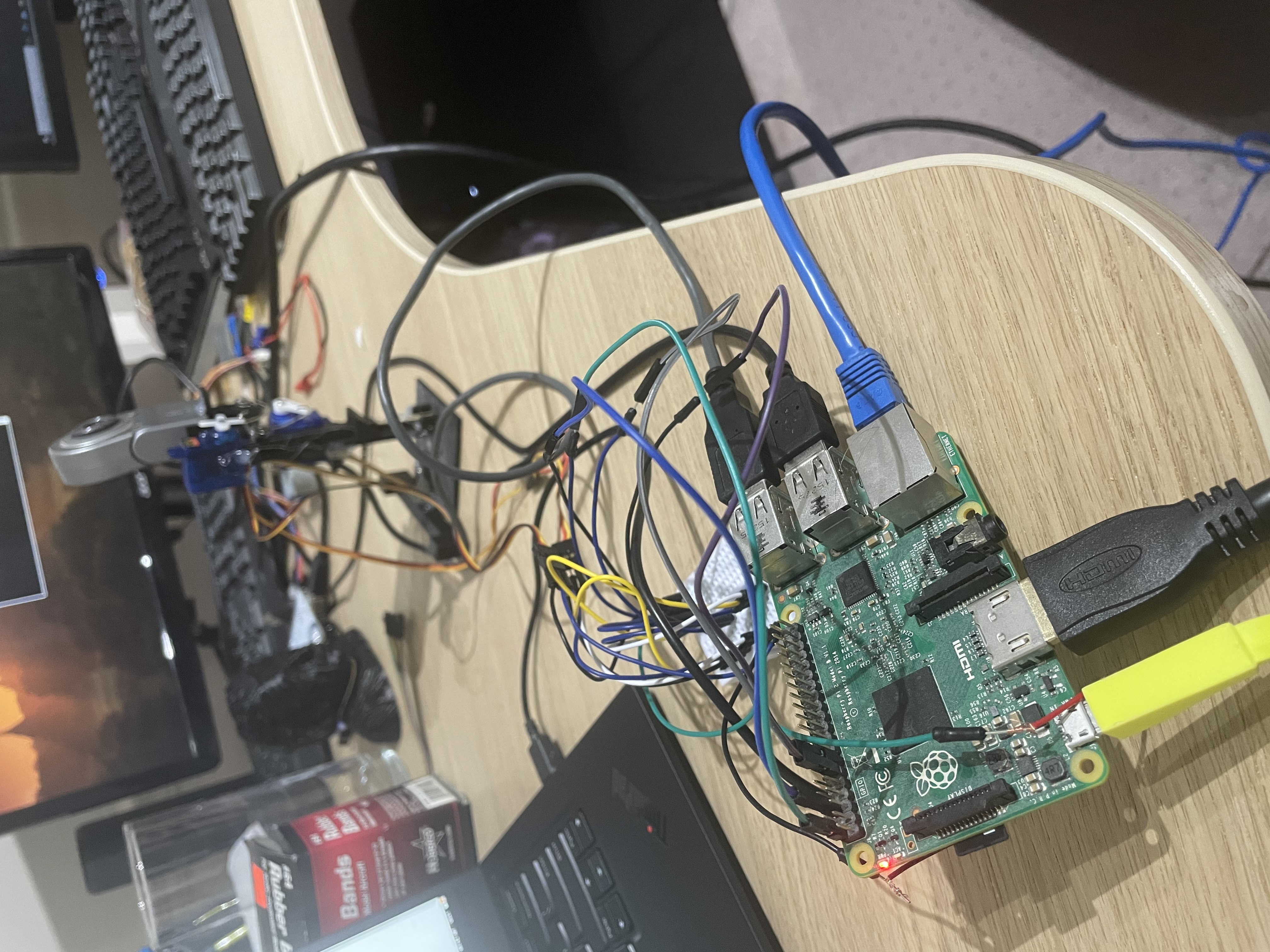
Ben first designed the mechanism in SolidWorks, and used his 3D printing expertise to develop a solid prototype in a very short amount of time.
Meanwhile, David researched optical image stabilization techniques, implemented servo control, and developed the Raspberry Pi platform.
Challenges I ran into
3D printing is imperfect, and we had to optimize and refine our prints on multiple occasions. Furthermore, in the optical image stabilization space: real time mechanical image stabilization is much harder than expected, Some difficulties include converting translations in the image to servo movements. We also found the algorithm would try to correct it's own motion.
Accomplishments that I'm proud of
Between the both of us, this was our first hardware hack, and for one of us, our first Hackathon. We were able to take multiple failures and improvise many effective solutions.
Furthermore, the online nature of this Hack The North made a hardware hack even more daunting then it already would have been, and we are proud that we were able to undertake this difficult task using minimal equipment.
What I learned
Red Bull does not give you wings.
Hardware hacking is more difficult than software. However, the tangibility of the final result, be it the one that you expected, or otherwise is unmatched and extremely rewarding.
We unfortunately learnt that 3D printing does not often go as expected, and you should always account for failures and inefficiencies when planning to use one.
As a more hard skill, developing for remote systems, such as the Raspberry Pi can be quite difficult, and building an effective development toolchain is crucial and requires almost as much thought as the software itself.
What's next for DualAxisCamera
Unfortunately, not much. We built an interesting platform and there is clearly room for potential.
We are proud of what we were able to build, but all good things must come to an end.
Built With
- 3d
- 3dprinting
- opencv
- python
- solidworks

Log in or sign up for Devpost to join the conversation.