Inspiration
What it does
DroneOps is an autonomous cleanup fleet simulation designed to show how coordinated drones can clean coastal and public spaces more efficiently than isolated manual operation. Instead of controlling one drone at a time, our solution organizes the mission by zones, assigns one drone per zone, and runs a full pickup-to-delivery workflow with live telemetry.
Our motivation came from a practical problem: environmental cleanup operations often fail because coordination is hard, not because individual tools are weak. We wanted to prototype a system where mission logic is transparent, observable, and reliable under real-world constraints.
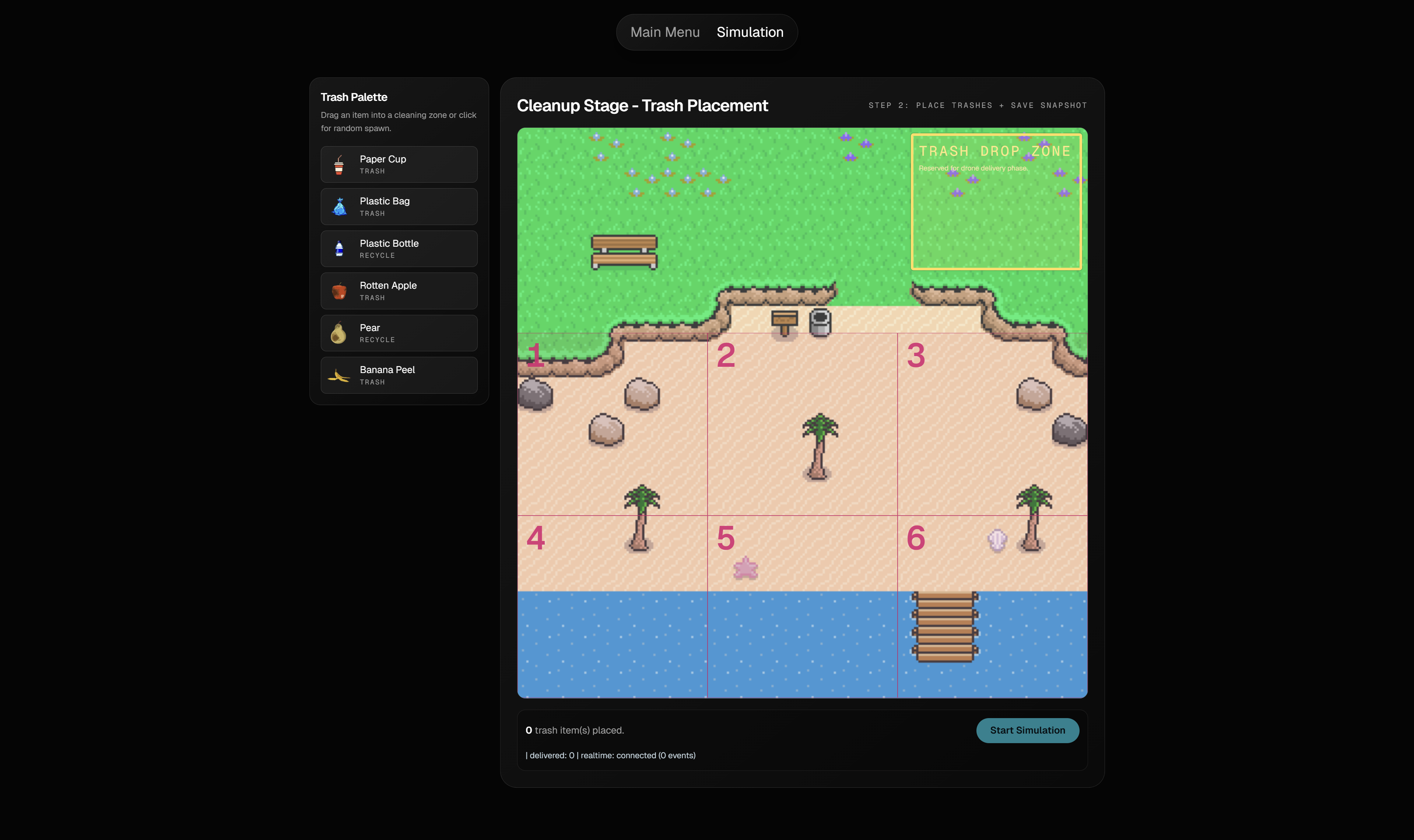
The simulation flow is structured in clear phases:
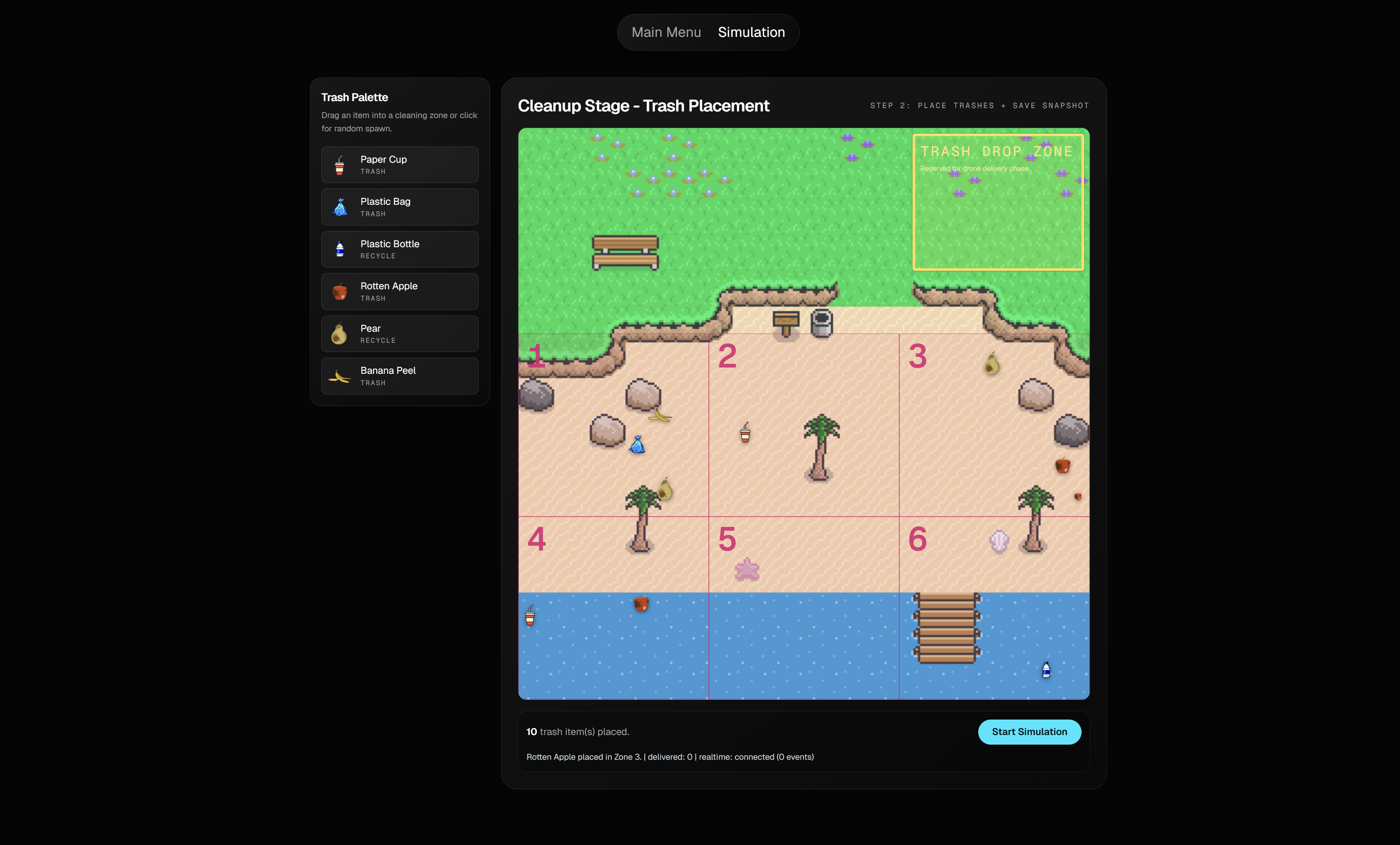
- The operator places trash items on a map through drag-and-drop.
- The map is divided into six operational zones.
- The placement snapshot is validated and saved in MongoDB.
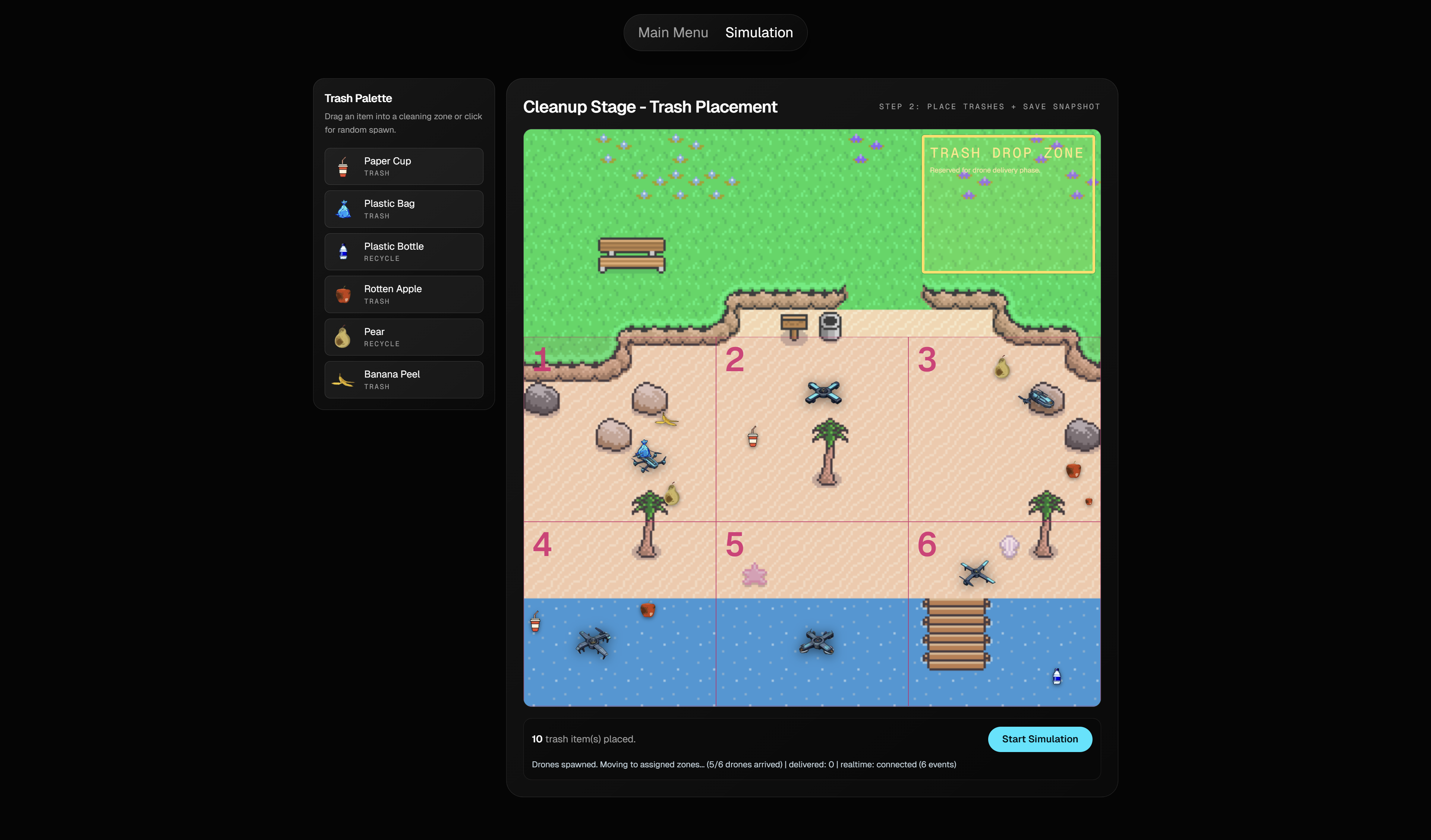
- Six drones spawn and move to pre-assigned zone targets.
- Each drone repeatedly picks the nearest trash in its own zone until that zone is clean.
- All drones converge to a shared drop zone and deliver collected items.
- Telemetry streams live to the UI via Server-Sent Events (SSE), while persistence to MongoDB is handled in best-effort mode.
This gives us deterministic zone ownership, efficient local decision-making, and real-time observability. We also designed the backend to degrade gracefully: if persistence fails temporarily, the simulation continues instead of breaking the user experience.
In short, DroneOps demonstrates a complete autonomous orchestration loop: mission setup, state persistence, zone-based execution, coordinated delivery, and live monitoring in one web platform.
Inspiration (Devpost Field)
We were inspired by the growing need for scalable environmental cleanup and by the gap between drone hardware capabilities and fleet-level orchestration software. We wanted to build a system that highlights coordination, reliability, and mission transparency.
What It Does (Devpost Field)
DroneOps lets users place waste on a simulated field, then launches a six-drone fleet that autonomously:
- Travels to assigned zones.
- Detects and picks nearest trash in-zone.
- Empties all six zones in parallel.
- Delivers collected waste to a central drop area.
- Streams live telemetry (drone state + trash state) for real-time visibility.
How We Built It (Devpost Field)
We built DroneOps as a Next.js App Router application with React and TypeScript. The frontend handles simulation rendering, drag-and-drop placement, drone animation, and real-time status updates. The backend provides API routes for placement snapshots and telemetry ingestion. Telemetry is published through an in-memory event bus and streamed to clients through SSE. MongoDB stores placement snapshots and telemetry events for persistence and replay potential.
Key implementation choices:
- Strong TypeScript typing for simulation entities.
- Runtime payload validation at API boundaries.
- Zone-based drone assignment for predictable coordination.
- Distance-scaled movement durations for realistic animation timing.
- Best-effort database writes to keep real-time behavior responsive.
Challenges We Ran Into (Devpost Field)
- Keeping real-time simulation smooth while also persisting data.
- Preventing state desynchronization during concurrent drone updates.
- Enforcing valid drops and safe spawn positions inside zone constraints.
- Maintaining resilient behavior when database connectivity is unstable.
Accomplishments That We Are Proud Of (Devpost Field)
- Built a complete end-to-end autonomous fleet simulation workflow.
- Added real-time telemetry streaming with connection-state feedback.
- Implemented robust fallback behavior when persistence is unavailable.
- Delivered a clear, demo-friendly UX that makes fleet logic easy to understand.
What We Learned (Devpost Field)
- Deterministic zone ownership simplifies multi-agent coordination.
- Observability is essential for trustworthy autonomous behavior.
- Real-time systems need graceful degradation paths, not hard failures.
- Typed contracts plus runtime validation dramatically improve reliability.
What's Next for DroneOps (Devpost Field)
- Dynamic zone rebalancing when one sector becomes overloaded.
- Smarter assignment heuristics based on travel cost and queue length.
- Collision-aware path planning and altitude layering.
- Priority handling for hazardous waste categories.
- Expanded analytics dashboards for mission performance metrics. ## How we built it
Challenges we ran into
Accomplishments that we're proud of
What we learned
What's next for DroneOps
Built With
- api
- css
- mongodb
- next.js
- node.js
- react
- server-sent
- tailwind
- typescript

Log in or sign up for Devpost to join the conversation.