-
-
Setup
-
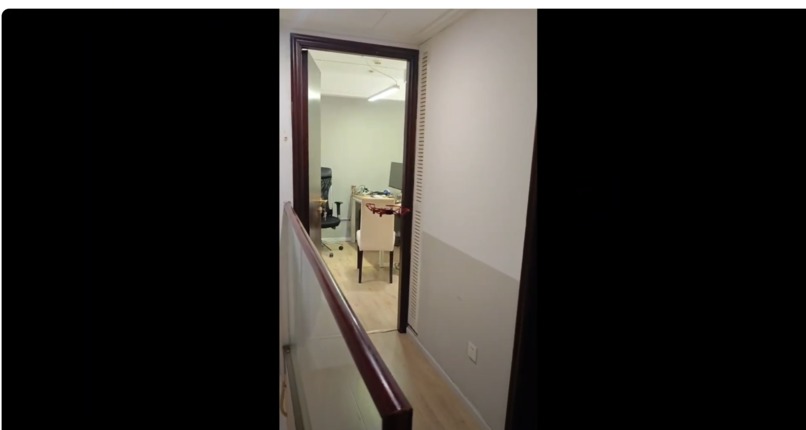
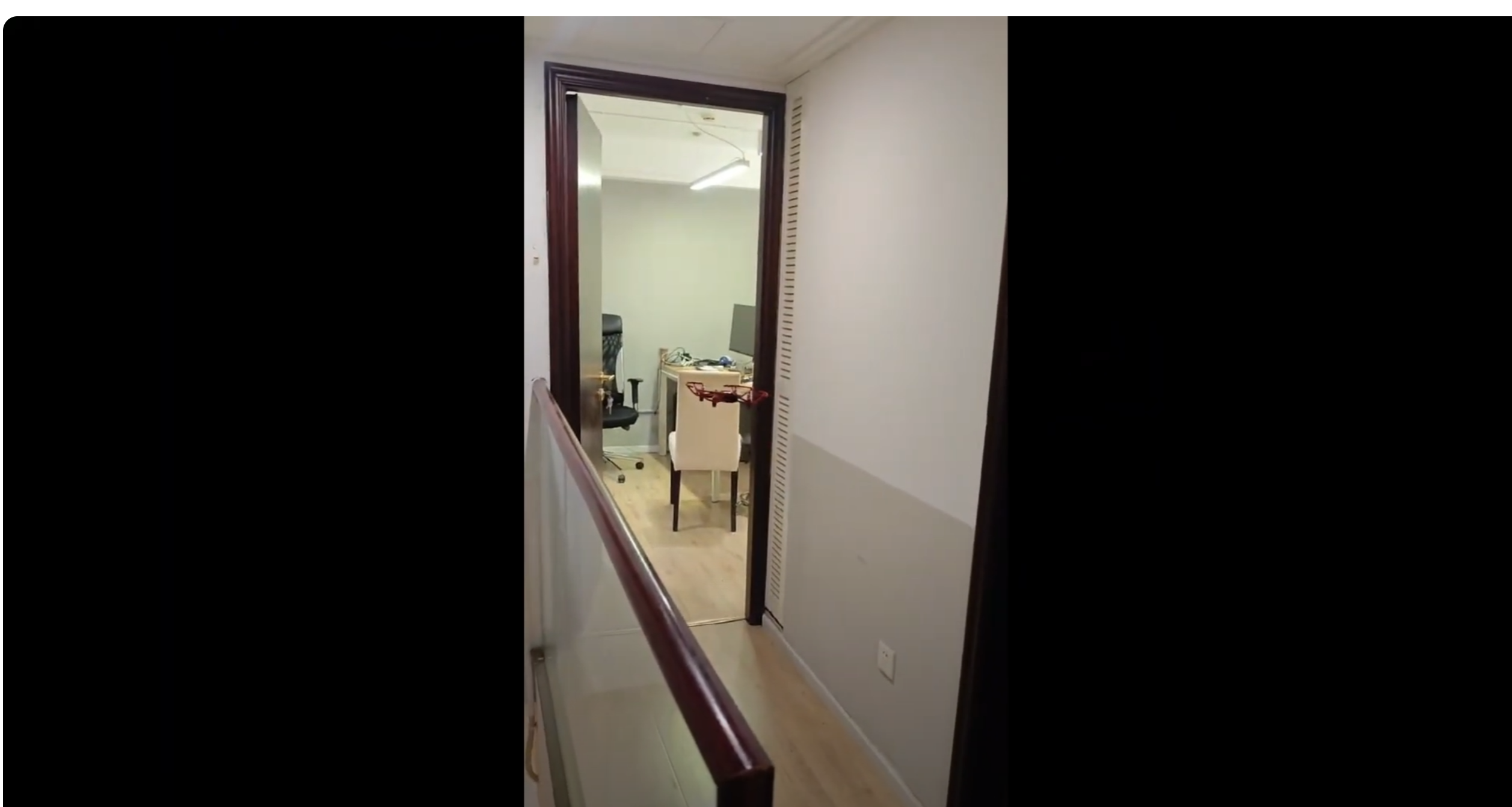
Demo with tello drone
-

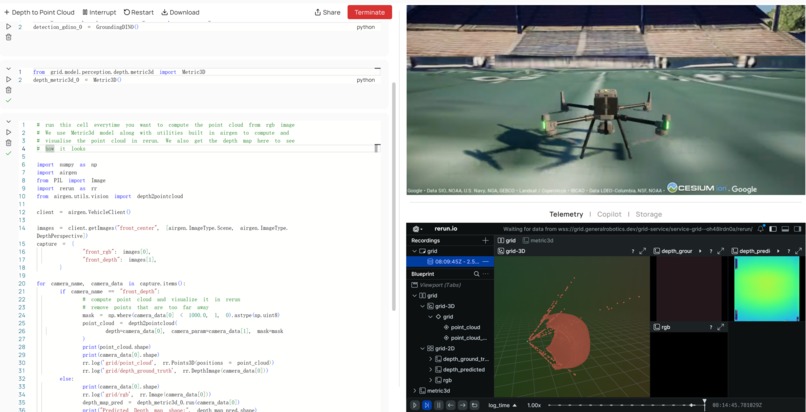
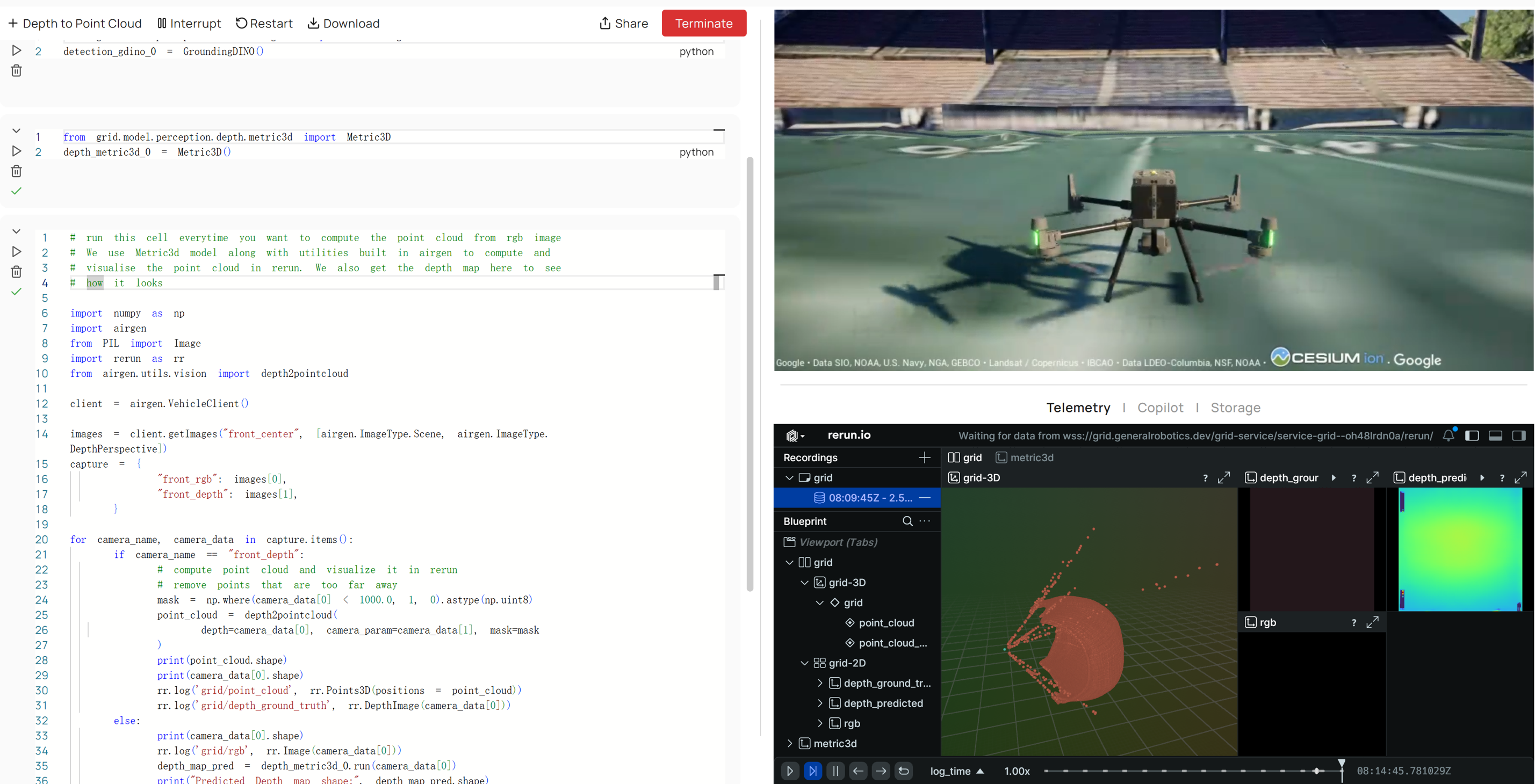
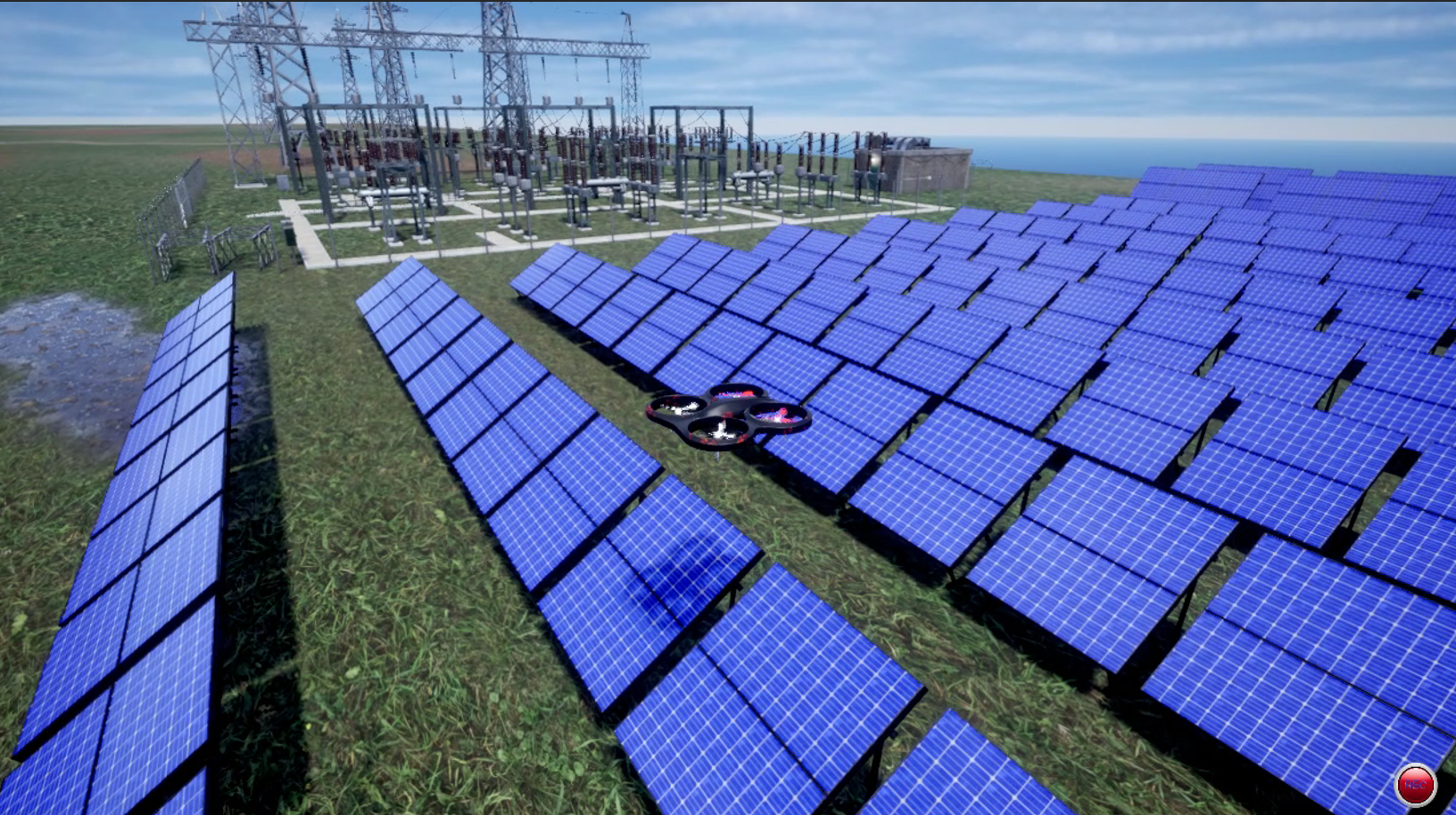
Demo with Airsim
-
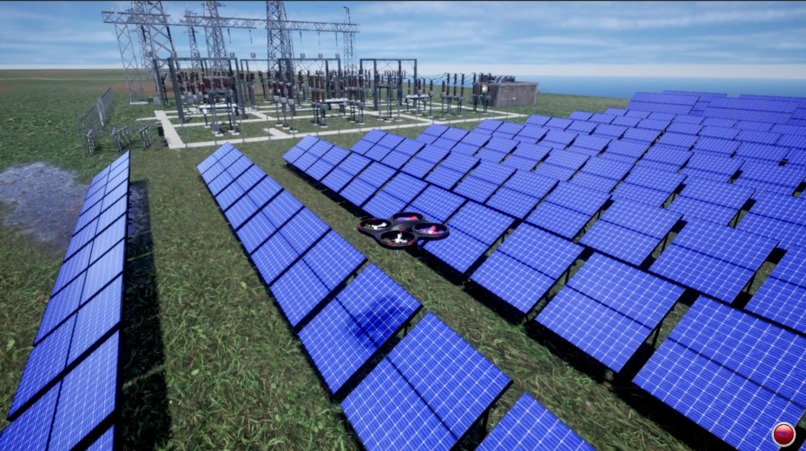
Demo with Airsim
-
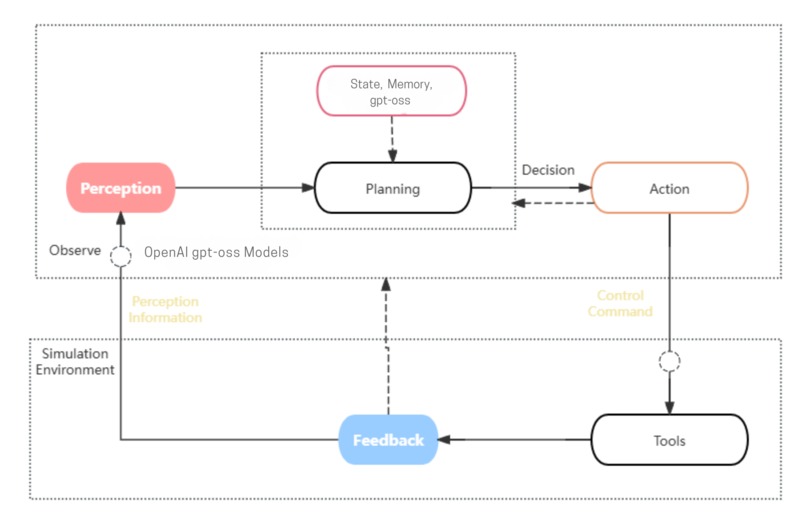
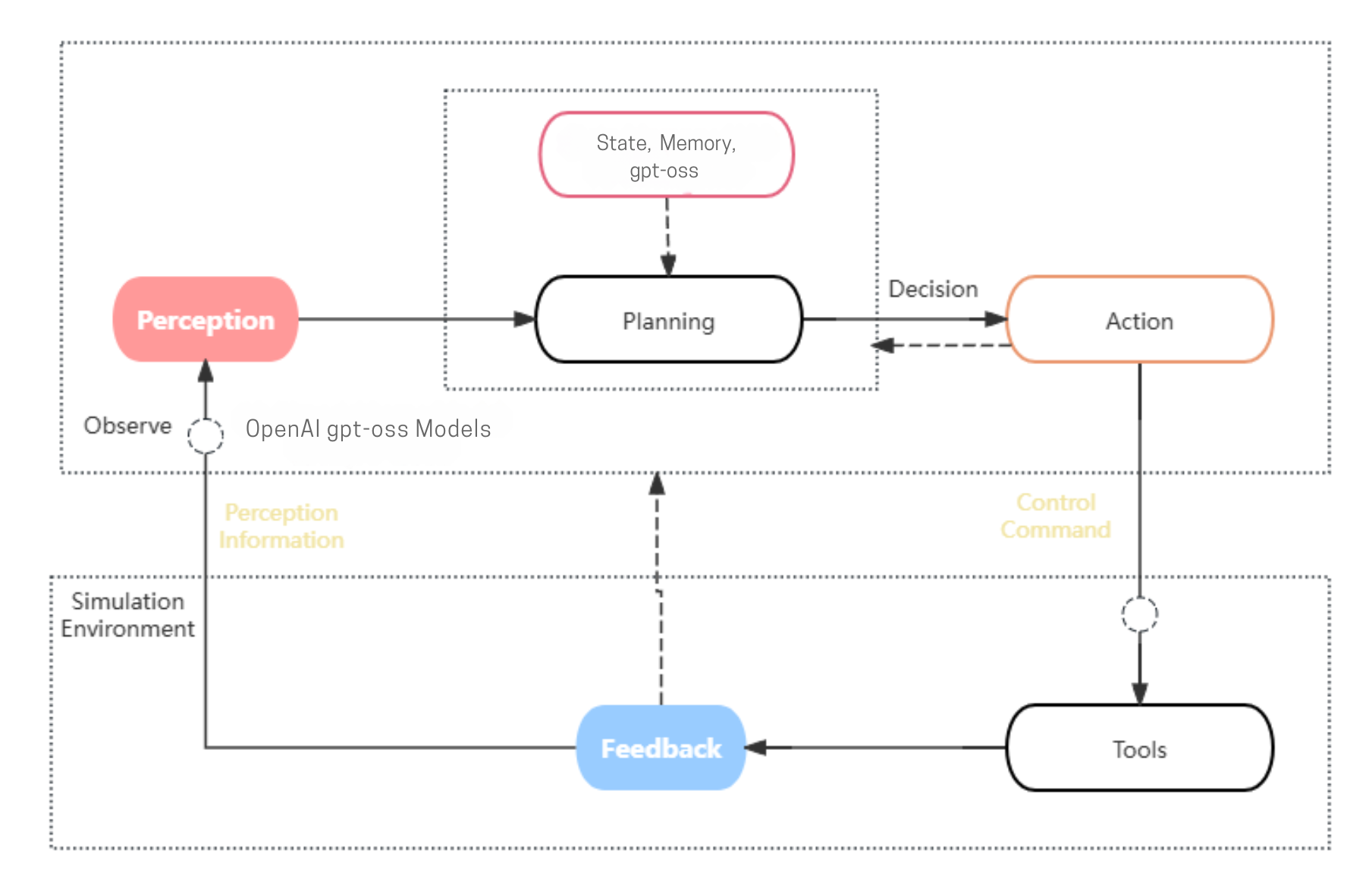
Architecture

💡 Inspiration
The future of robotics lies in natural language interaction with intelligent reasoning. We were inspired by OpenAI's gpt-oss open-weight reasoning models to revolutionize drone control - moving beyond simple remote control to autonomous missions powered by conversational AI and advanced spatial reasoning.
🚁 What it does
This project uses gpt-oss to control drones based on natural language instructions, enabling autonomous flight in the AirSim simulation environment. The project also includes a simple flight case with a real drone.
DroneGPT lets you control drones using natural language powered by gpt-oss-120b reasoning. Simply say:
- "Take off and inspect the wind turbine for damage while maintaining safe distance"
- "Survey the solar panel grid using a systematic pattern"
- "Fly forward 3 meters through the doorway with safety analysis"
The system thinks through optimal flight paths, calculates safety margins, and executes complex autonomous missions - no programming or remote control needed.
Key Capabilities:
- Industrial Inspections: Systematic wind turbine blade coverage (3 angles + rear inspection) and solar panel grid surveys (200 panels, lawn-mower pattern)
- Advanced Spatial Reasoning: Converts "fly 30 degrees below horizontal" into precise 3D coordinates
- Safety-First Operations: Automatic collision avoidance, battery monitoring, emergency landing protocols
- Sim-to-Real: Same commands work in both simulation and real hardware
🔧 How we built it
Core Innovation: gpt-oss-120b Reasoning Engine
- Uses OpenAI's 120-billion parameter reasoning model via HuggingFace/Cerebras
- Reasoning Effort Control: Low (quick maneuvers) → Medium (navigation) → High (complex missions)
- Real-time natural language → Python code generation with safety validation
Dual Environment Architecture:
🖥️ AirSim Simulation (Training & Testing)
- Microsoft's high-fidelity Unreal Engine drone simulator
- Industrial scenarios: wind farms, solar installations
- Virtual safety testing without hardware risk
- Complex 3D environments with realistic physics
🛸 Real Hardware (DJI Tello EDU)
- Physical drone control with identical natural language interface
- Real-time safety systems: battery checks, obstacle detection
- Actual flight validation of simulation-trained reasoning
- Emergency protocols for real-world constraints
🧠 The Magic: Seamless Integration The breakthrough was making the same gpt-oss reasoning work identically in both virtual simulation and physical hardware. A command like "inspect the turbine" triggers the same intelligent planning process whether controlling a simulated drone or real Tello.
📚 What we learned
- gpt-oss excels at spatial reasoning - perfect for 3D navigation and geometric calculations
- Multi-step mission planning - the model naturally chains complex sequences (takeoff → approach → inspect → return)
- Dynamic intelligence scaling - reasoning effort control balances speed vs. complexity perfectly
- Safety integration - gpt-oss can embed safety analysis directly into flight planning
⚡ Challenges we overcame
- Real-time responsiveness: Balancing deep reasoning with immediate flight control needs
- Safety-critical integration: Making gpt-oss reasoning reliable enough for physical drone operations
- Sim-to-real transfer: Ensuring simulation training translates perfectly to real hardware
- Natural language precision: Optimizing prompts for exact drone control while maintaining conversational feel
🚀 What's next for DroneGPT
- Swarm Intelligence: Multi-drone coordination using gpt-oss reasoning
- Fine-tuned Models: Custom gpt-oss variants trained specifically for robotics applications
- Edge Deployment: Offline reasoning for missions without internet connectivity
- Enterprise Platform: Complete drone development suite powered by gpt-oss
- Search & Rescue: Emergency response missions with autonomous decision-making
🎯 Why This Matters
DroneGPT represents the first practical integration of OpenAI's gpt-oss reasoning models with autonomous robotics. It demonstrates that large language models can move beyond text generation to control physical systems intelligently and safely - opening entirely new possibilities for conversational robotics and embodied AI.
Impact: From industrial inspections to emergency response, DroneGPT makes advanced drone operations accessible through simple conversation rather than complex programming or manual piloting.
Built With
- jupyter-notebooks
- microsoft-airsim-simulator
- openai-gpt-oss
- python
- tello-drone
- tello-sdk
- unreal-engine


Log in or sign up for Devpost to join the conversation.