-
-

Drocon
-
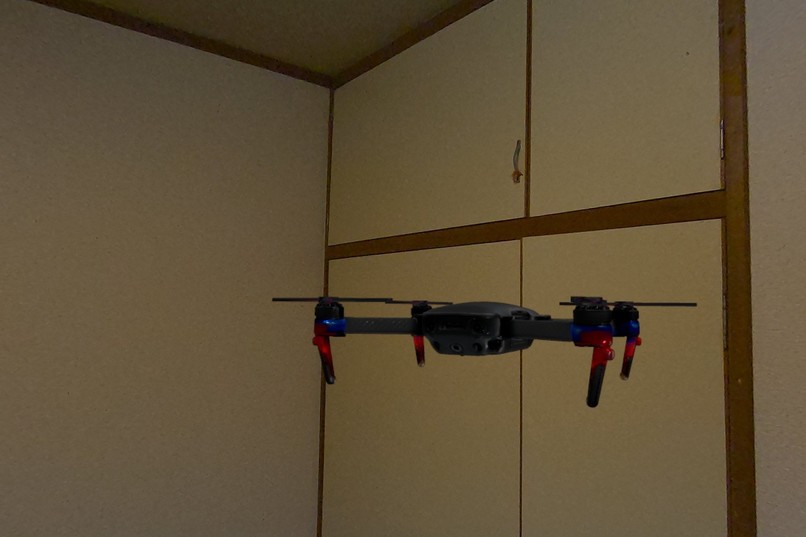
部屋
-
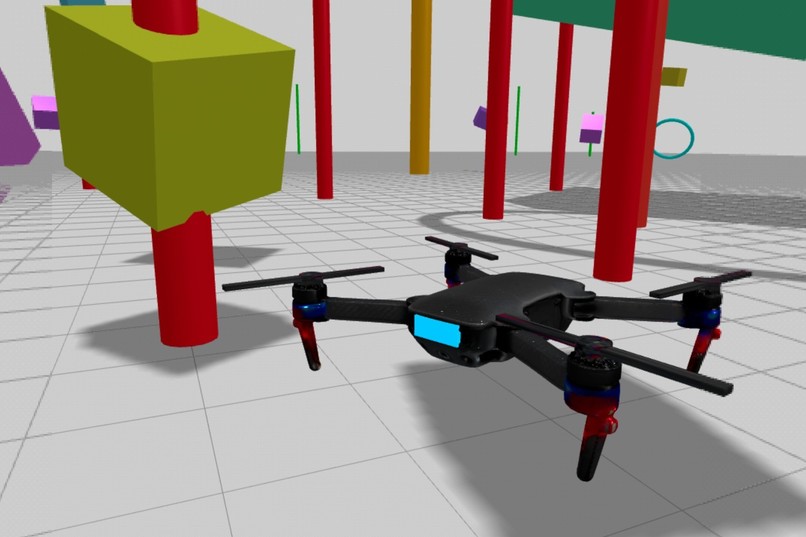
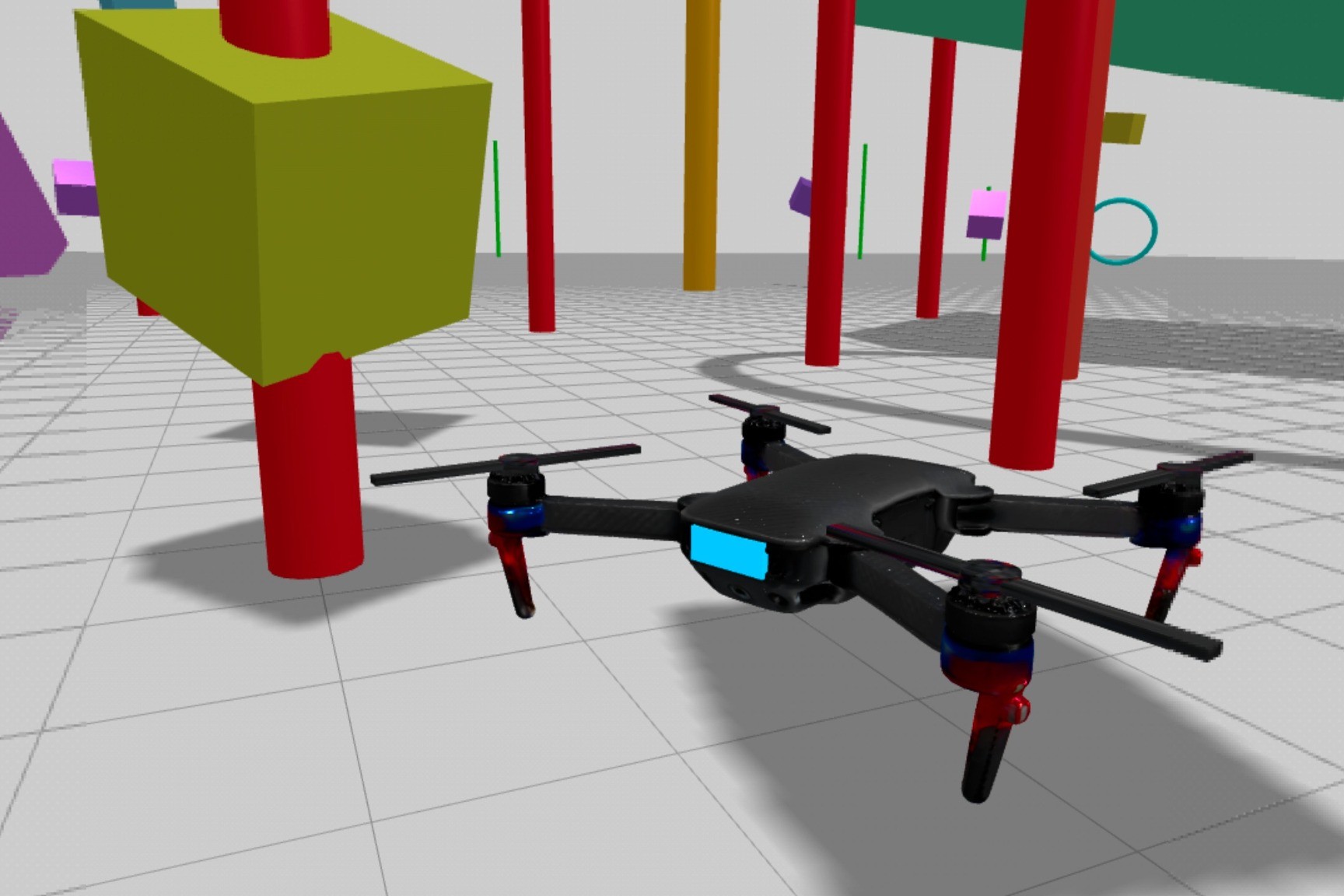
VR
-

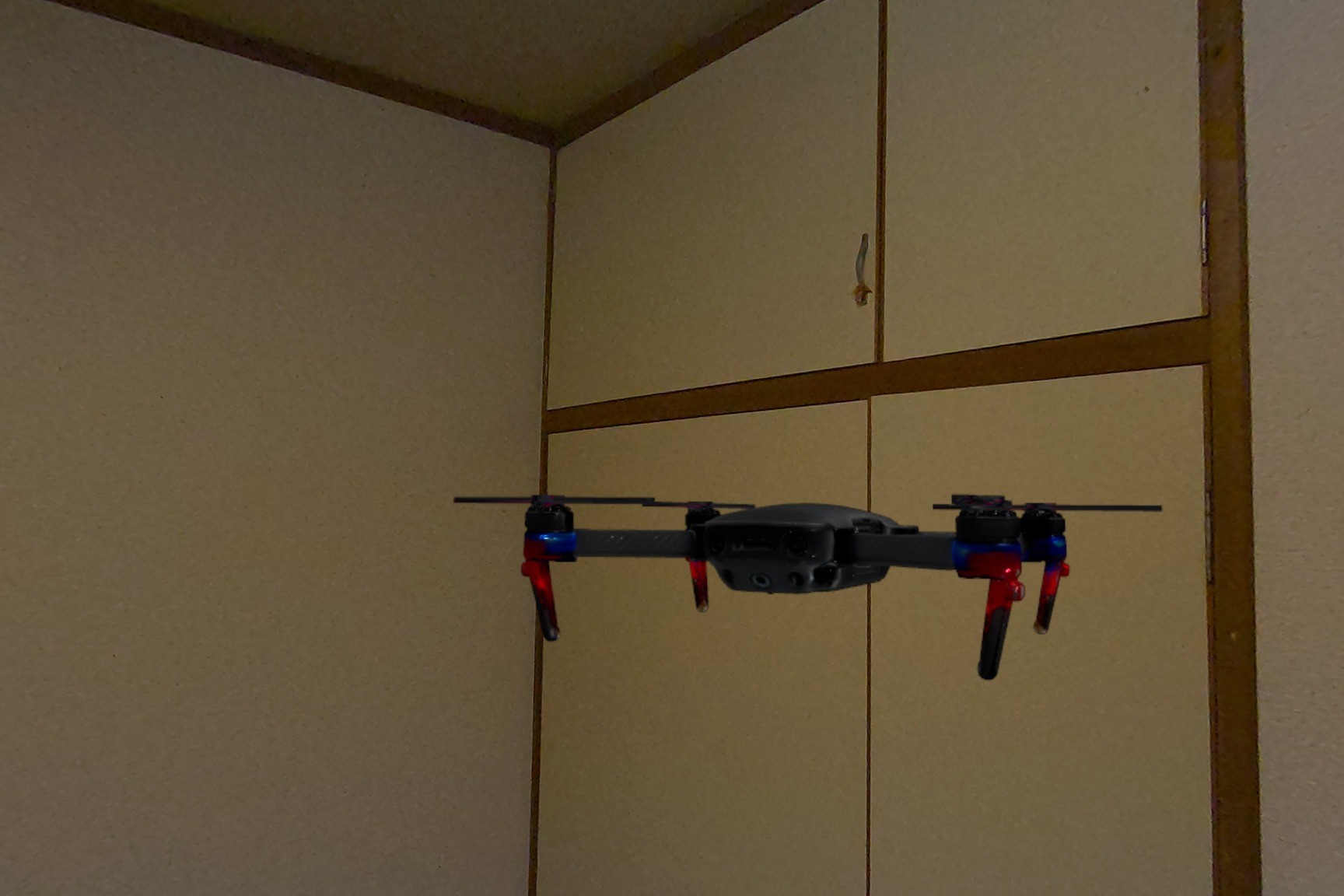
廊下
-

手乗り



Inspiration
I've always been fascinated by the potential of mixed reality to blend the digital and physical worlds. When I started exploring MR development, I realized that most drone simulators were limited to fully virtual environments. I wanted to create something different—a simulator where you could fly a drone in your actual living room, seeing it interact with your real furniture and walls. This vision of true reality-virtuality fusion drove me to build Drocon.
What it does
Drocon is a realistic drone simulator that works in both MR and VR, built with Three.js and WebXR. In MR mode, the drone naturally hides behind real-world objects using depth sensor occlusion and casts realistic shadows on actual surfaces. Using 3D-scanned meshes of your environment, the drone can collide with walls and tables, and even land on real surfaces. The simulator features authentic drone sounds and flight dynamics, with extensive customizable parameters so users can fine-tune the drone's behavior. Both indoor and outdoor modes are available for varied experiences.
How we built it
I developed Drocon using Three.js and WebXR, with Cursor and Claude Code as my primary development tools. The project required deep integration with Quest's depth sensing APIs and careful implementation of physics systems to handle collisions with scanned 3D meshes.
Challenges we ran into
MR development presented unique challenges that simply don't exist in VR. The biggest hurdle was occlusion—making virtual objects properly hide behind real-world objects. Quest's WebXR support also had inconsistencies that required extensive testing and workarounds. Each problem demanded methodical verification and patient debugging.
Accomplishments that we're proud of
I'm proud of achieving true depth sensor-based occlusion that works with any real-world obstacle. The realistic shadow rendering in MR mode and the collision system using 3D-scanned meshes create a genuinely immersive experience. Most importantly, I succeeded in creating a seamless fusion of reality and virtuality.
What we learned
Through painstakingly testing and verifying each issue, I gained a much deeper understanding of WebXR and MR development. This project reinforced my belief that reality and virtuality are not separate worlds—they can truly become one.
What's next for Drocon
I plan to add multiplayer support so users can fly drones together in shared spaces. I'm also exploring more realistic physics models, additional drone types, and gamification elements like racing modes and obstacle courses. Eventually, I hope Drocon can serve as a training tool for real drone pilots.
Built With
- webxr





Log in or sign up for Devpost to join the conversation.