WATCH IT IN ACTION https://imgur.com/a/LsbGBSL
Inspiration
Friday was Viven's first day driving a car, and he experienced some difficulties controlling the car and being aware of all his surroundings. That got us thinking about what every driver experiences throughout their driving experience. Since we are young drivers we began to think of solutions that we would find useful throughout our time driving in the future. We wanted to create multiple systems that would be able to aid and monitor drivers in a way to keep them safe from the many perilous dangers surrounding them. This system will also be able to greatly reduce the rate of accidents with the many safety and protection features.
What it does
The system has multiple parts including the use of a multi-camera system both on the interior and exterior of the car. The innovative opencv system is able to accurately detect if the driver is falling asleep or not. In case the driver is falling asleep, the system emits a beep to awaken the driver. This way, if they fall asleep, they will be woken up immediately preventing many crashes and saving lives. The exterior camera has the ability to detect obstacles, including cars, people, and bikes. The information is updated on the GUI interface with the location(right / left) of the obstacle. This will aid drivers in determining whether it is safe to change lanes and adds another level of security to the driving world. These interconnected mechanisms give a complete view of the car surroundings to assist you in driving safely.
How we built it
The internal camera uses opencv in order to recognize the iris and if the driver's eyes are closed or not looking at the road. An arduino will beep to notify the driver
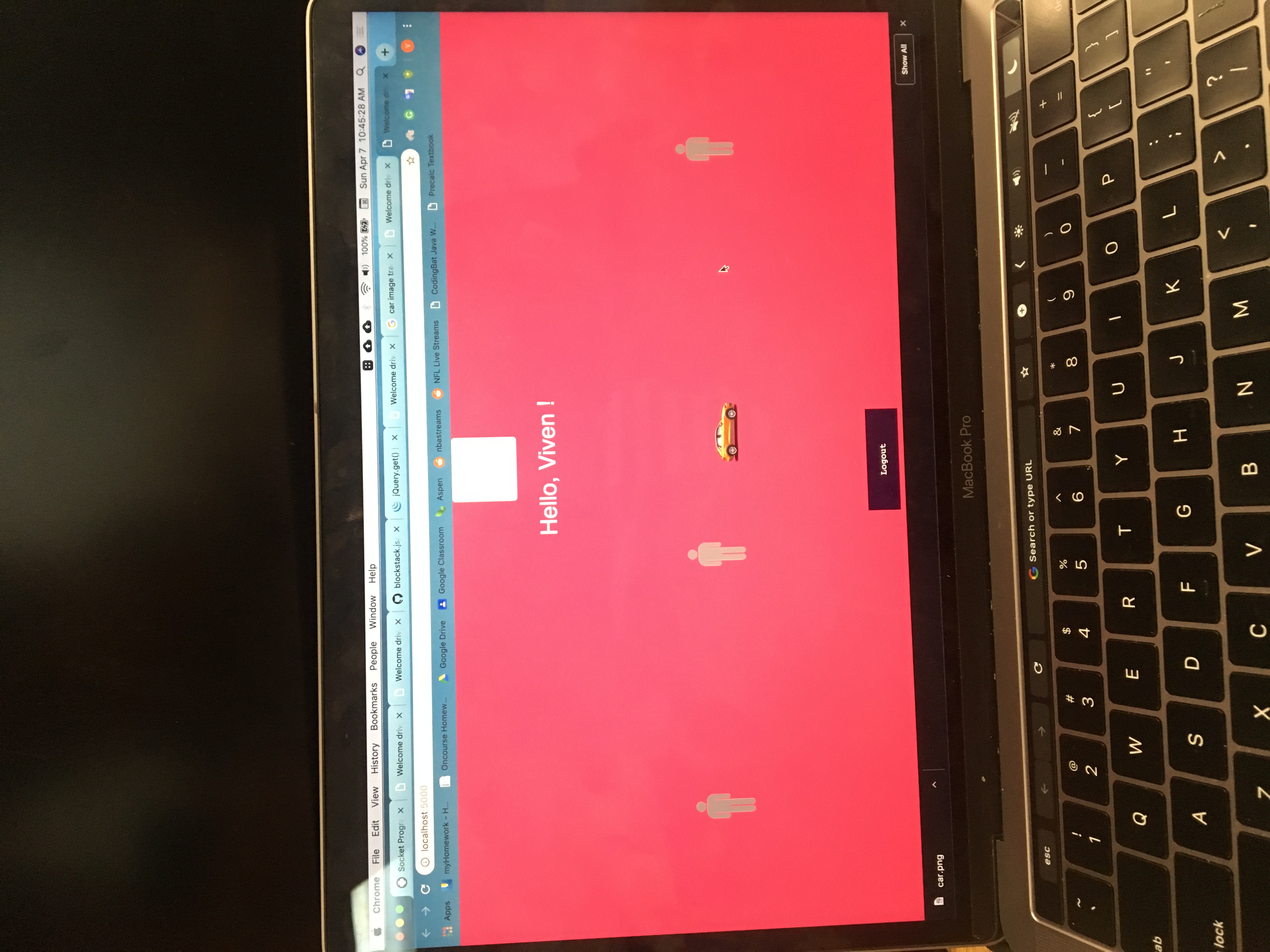
The external camera uses the yolov3 network to determine locations of obstacles seen by the camera and sends it to a node server. The node server displays the obstacles on a webpage(DrivingPal.net) and uses blockchain authentication to make unlocking a car keyless.
Voice command is used with google cloud platform to initiate the system.
Challenges we ran into
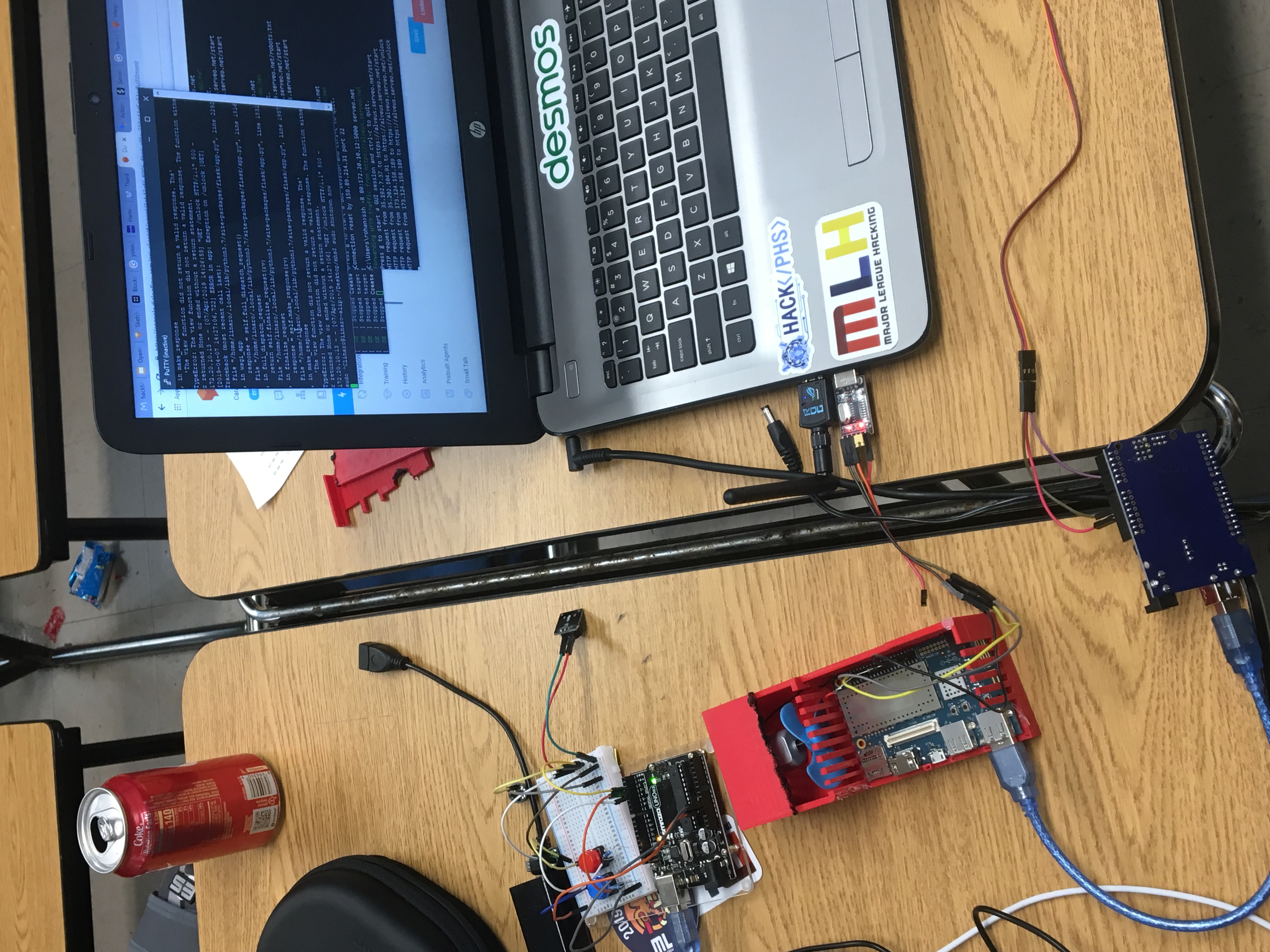
Connecting everything together using sockets and get requests. Getting yolov3 working properly on pyTorch
Accomplishments that we're proud of
We got everything working - each part initiates at a voice command The sleep/distraction detection is very accurate
What's next for DrivingPal
A faster neural network made specifically for real-time detection of certain objects. Combining everything into one computer like a raspberry pi.
Built With
- arduino
- blockchain
- blockstack
- c++
- css3
- dialogflow
- dragonboard
- flask
- google-cloud
- html5
- javascript
- npm
- opencv
- python
- pytorch
- tensorflow
- webcam
- yolov3



Log in or sign up for Devpost to join the conversation.