-
-
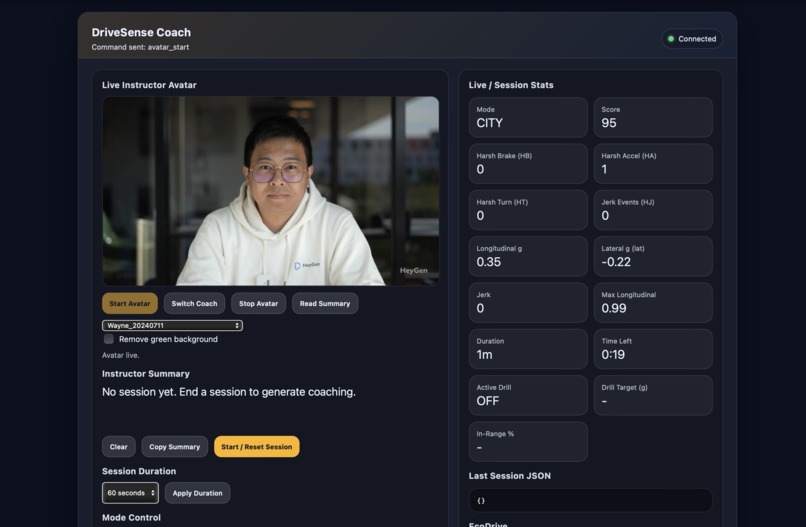
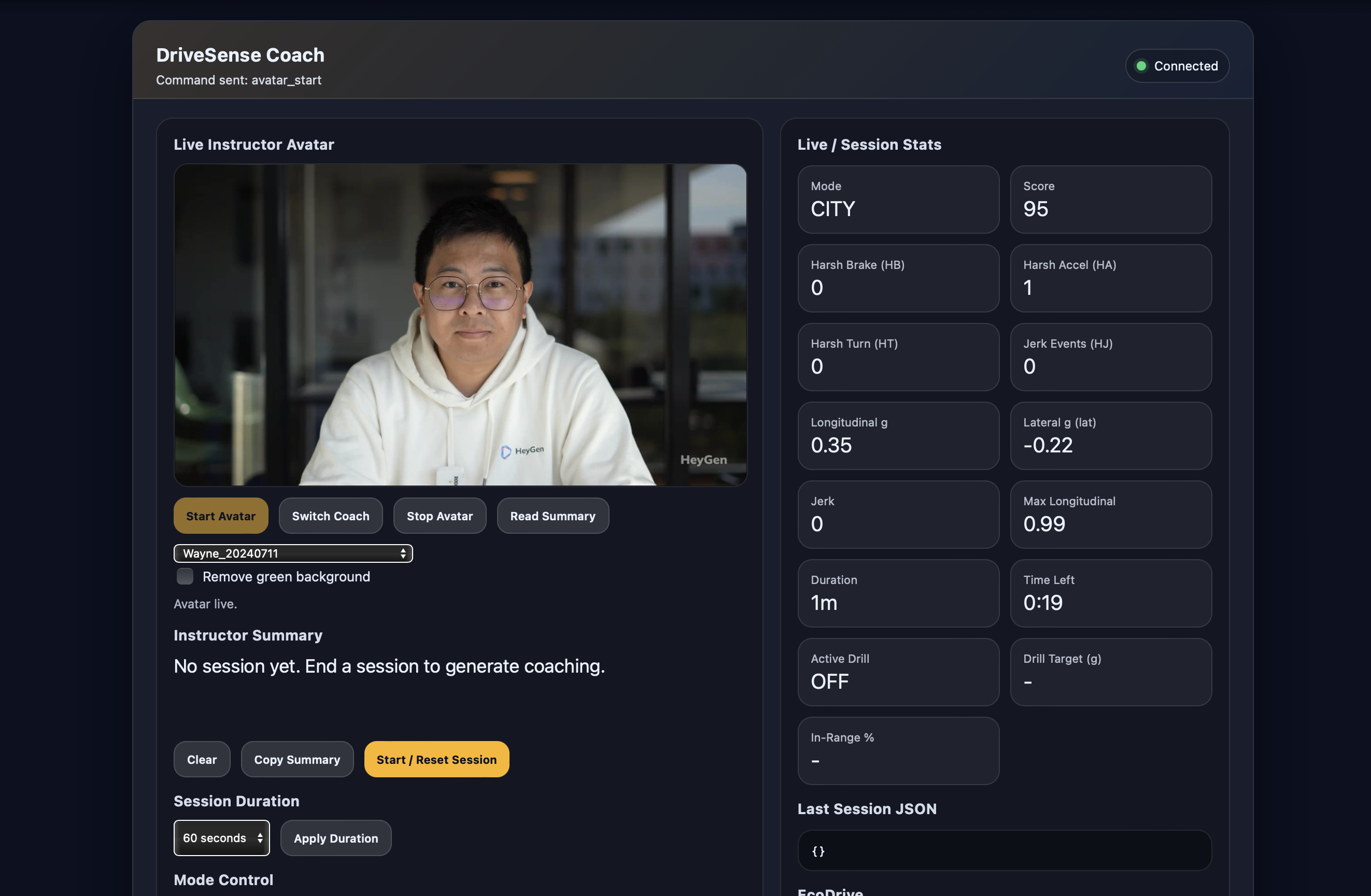
Home UI HeyGen live avatar (gives summary and tips)
-
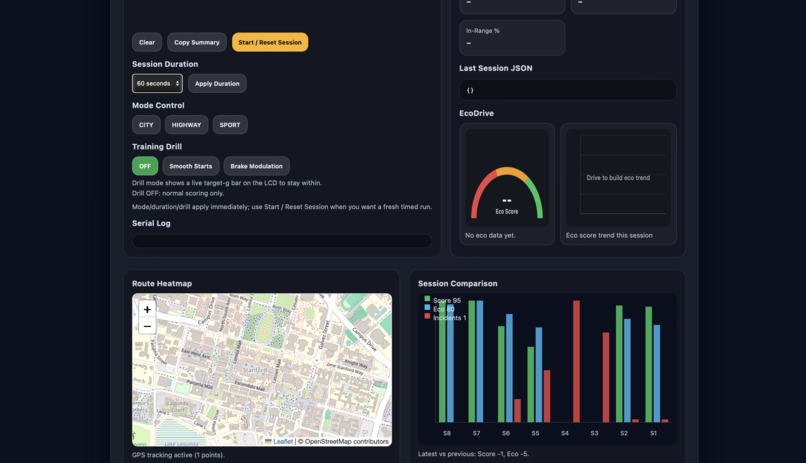
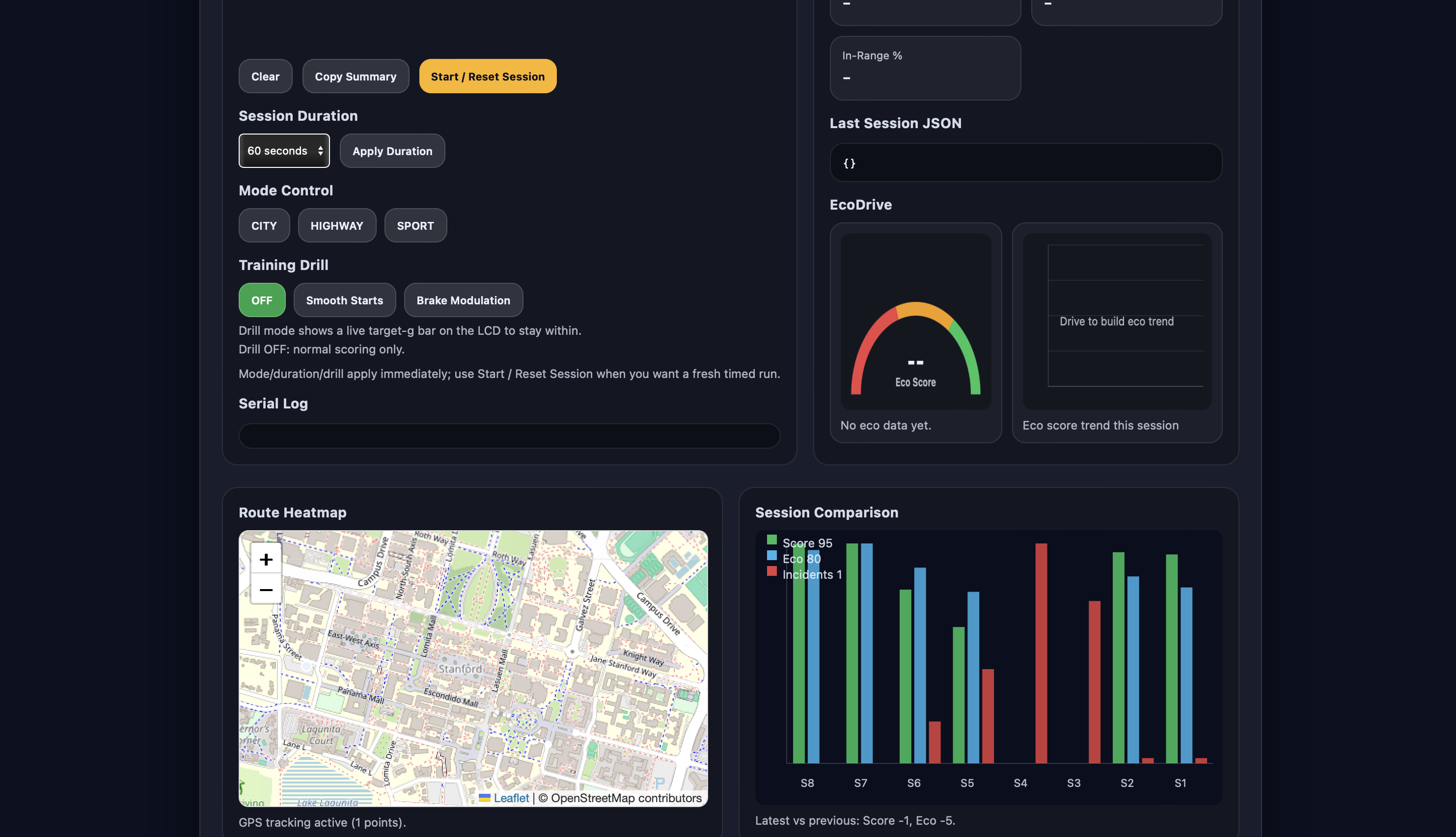
data and settings
-

half constructed
-

powered on
-

off
-

running



Inspiration
A lot of my friends I ski with don’t have a license yet. They’re excited to learn, but also nervous, and paying for professional lessons can feel expensive or intimidating. I wanted to build something that makes practice less scary and more structured, so people can learn to drive properly (smooth, controlled, predictable) instead of just learning how to “get around.”
What it does
Drive-Sense-Trainer is a compact driving instructor that scores your vehicle inputs in real time and turns every session into practice.
- Tracks smoothness using an IMU (longitudinal acceleration, lateral acceleration, and jerk)
- Detects harsh events like hard braking, harsh acceleration, sharp turns, and jerk spikes
- Runs short training drills like Brake Modulation and Smooth Starts
- Ends each session with a score + a personalized coaching lesson (what you did well, what to fix, and drills for next time)
- Includes a DEMO vs DRIVE mode so I can reliably test on a table and also validate in a real car
How we built it
- ESP32 firmware reads accelerometer data, estimates driving inputs, detects events, and prints live telemetry plus a
session_endJSON summary. - A Node.js bridge connects to the ESP32 over serial and broadcasts structured live updates to a local WebSocket server.
- A web dashboard shows live stat cards, timing, drill status, and session history comparisons, with controls to change mode/duration/drills without needing the Arduino Serial Monitor.
- After
session_end, the app uses AI coaching to generate a more natural, instructor-style lesson (and optionally a live avatar can read it out loud).
Challenges we ran into
- The 3D printer queue and hardware pickup lines made iteration slow, especially working solo.
- I had to make do with what I could grab: jumper wires were way too long, and the LCD wasn’t ideal, but I made it work.
- Tuning IMU thresholds so the system is responsive and stable was tricky, especially across tabletop testing vs real driving.
Accomplishments that we're proud of
This was my first hackathon, and getting a real end-to-end product across the finish line solo was incredibly rewarding. The best part is that it’s not just a sensor demo: it’s interactive, gives drills, and produces coaching that feels like a learning loop.
What we learned
- Don’t let the little things spiral. Stay calm, adapt, and keep moving.
- Don’t obsess over “winning.” Focus on learning, building something you’re proud of, and making it real.
- A good demo is about clarity: live feedback, simple controls, and an obvious improvement path.
What's next for Drive-Sense-Trainer
- More real-world testing and calibration in different cars/mounting positions
- Potentially integrate with an OBD2 reader for ECU data like speed (to improve context and accuracy)
- Replace borrowed components with my own hardware after the hackathon
- Keep building projects like this because they’re genuinely fun and rewarding
Built With
- accelerometer
- css
- esp32
- heygen
- html
- leaflet.js
- node.js
- openai
- ws

Log in or sign up for Devpost to join the conversation.