-
DriftBot v.1.0.0
Inspiration
We were inspired by autonomous vehicles.
What it does
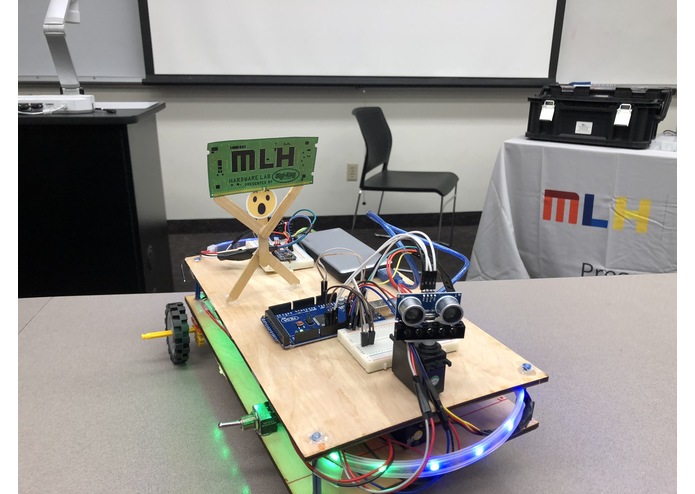
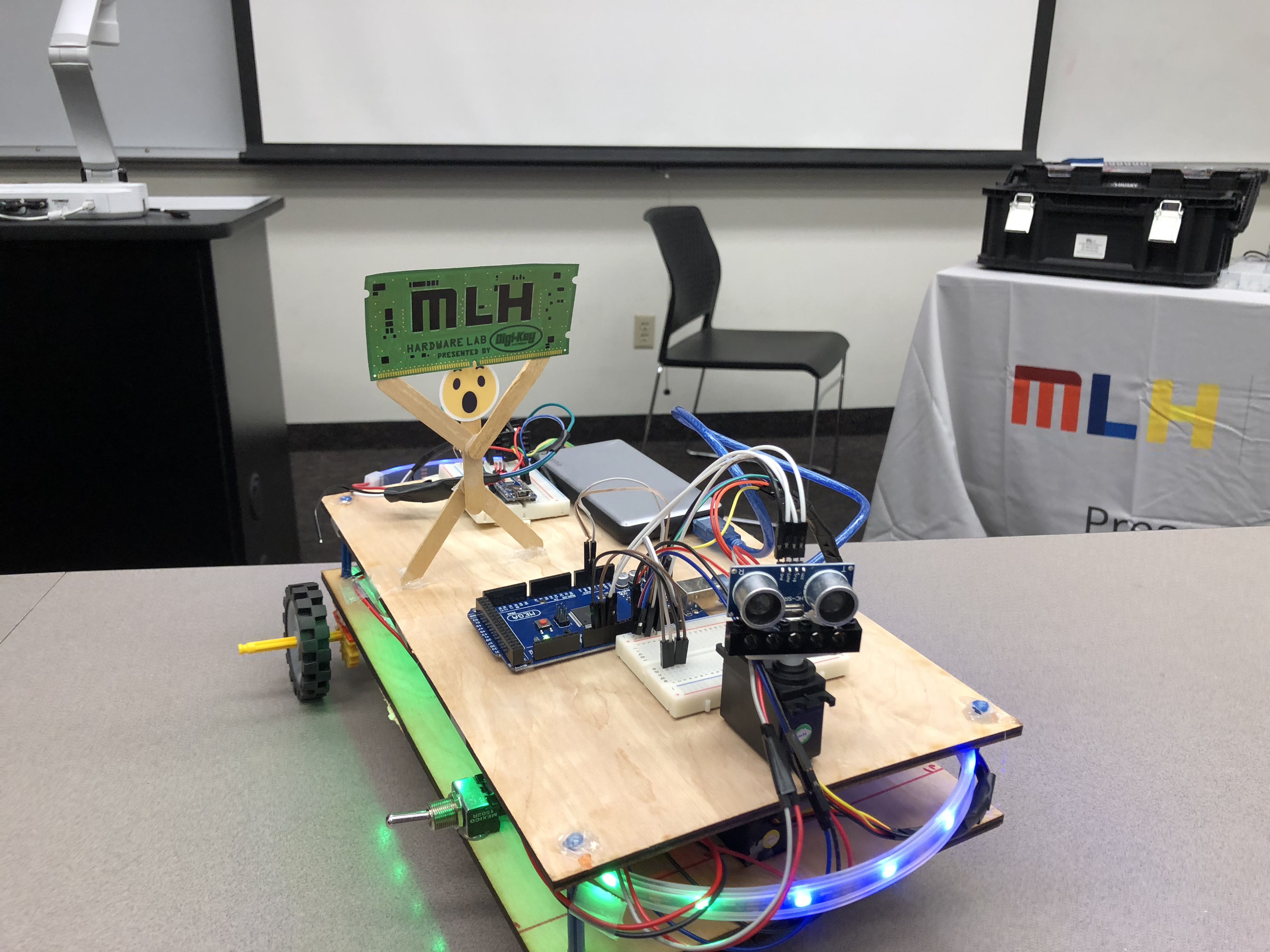
It's an obstacle avoiding vehicle built with ultrasonic radar. It can light up RGB lights to increase visibility.
How we built it
Using solidWorks, we designed a vehicle. Made drawing files for the top and bottom plates of the 2 level vehicle. The drawing files were sent to the FabLab at the central library for laser cutting. We then used a variety of K'nex and Legos to create a simple steering mechanism and gearing for our rear wheel driven vehicle. Then using arduino we programmed a motor driver to use PWM on a DC motor as well as added RGB Lights. The motor and the lights were powered through a 14.8v 4s 2200maH LiPo Battery. The lights were controlled through an Arduino Nano while the motor driver was controlled by a Arduino Mega. We found that running the lights and the driving code on one micro controller produced undesirable results, it was easier to have one board run important code, and the other one run a simple code. The Mega uses an ultrasonic sensor on a servo to act as a radar when it encounters an obstacle in its path, the radar has a 120 degree view split into three sections- front, left and right. It takes the average of all the sections and turns to the direction where there is less obstacles.
Did we mention it has RGB?
Challenges we ran into
Building the vehicle was difficult because we attempted to use an RC Car motor, but it was difficult to nearly impossibly to control its ESC (electronic speed controller). We had to change to a regular DC motor but the size was drastically different so the motor position had to change to use a crown gear so we could have the gear perpendicular to the gear box.
Initially we wanted to use the raspberry pi to use a webcam for object recognition. However, OpenCV proved more difficult to install than we imagined. After several hours of the raspberry pi heating up to critical levels and several freezes. OpenCV installed corrupted, so we had to change ideas because we already had the car built.
We flipped the directions of the servos on both the top and the bottom sections of the vehicle. If the ultrasonic sensor detected an object to the left of itself, the steering servo on the bottom turned into it because the it was the opposite direction of the ultrasonic sensor. This confused us for over an hour but we were shocked when we realized this simple mistake.
We obtained a 30 LED RGB strip from the MLH Hardware Lab. Our biggest challenge was to find the right code in order for the lights to reflect colors and sink it in chronological order. Our gear box is made up of k'nex blocks. Another challenge was the gear box kept falling apart.
Accomplishments that we're proud of
IT WORKS ! It does all the functions that we planned for.
What we learned
More hot glue...
What's next for DriftBot
To be able to use OpenCV for the object recognition and exchange the arduino Mega for the Raspberry pi 3 b+

Log in or sign up for Devpost to join the conversation.