-
-
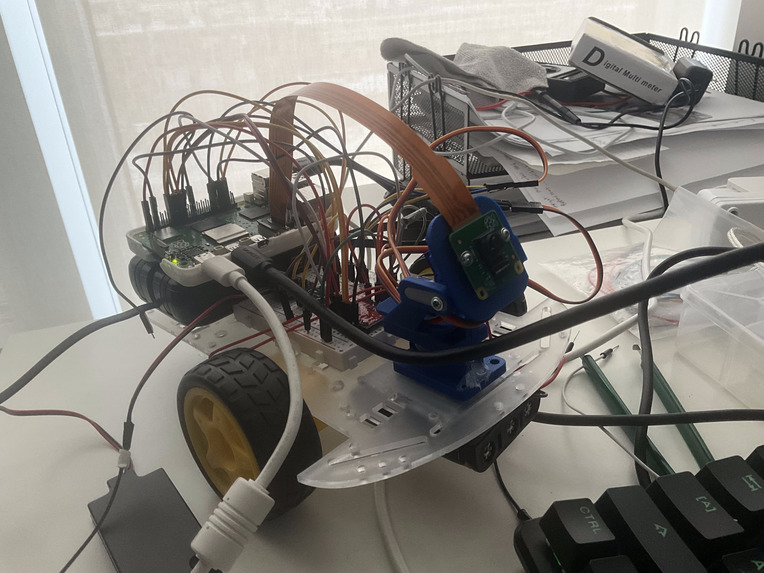
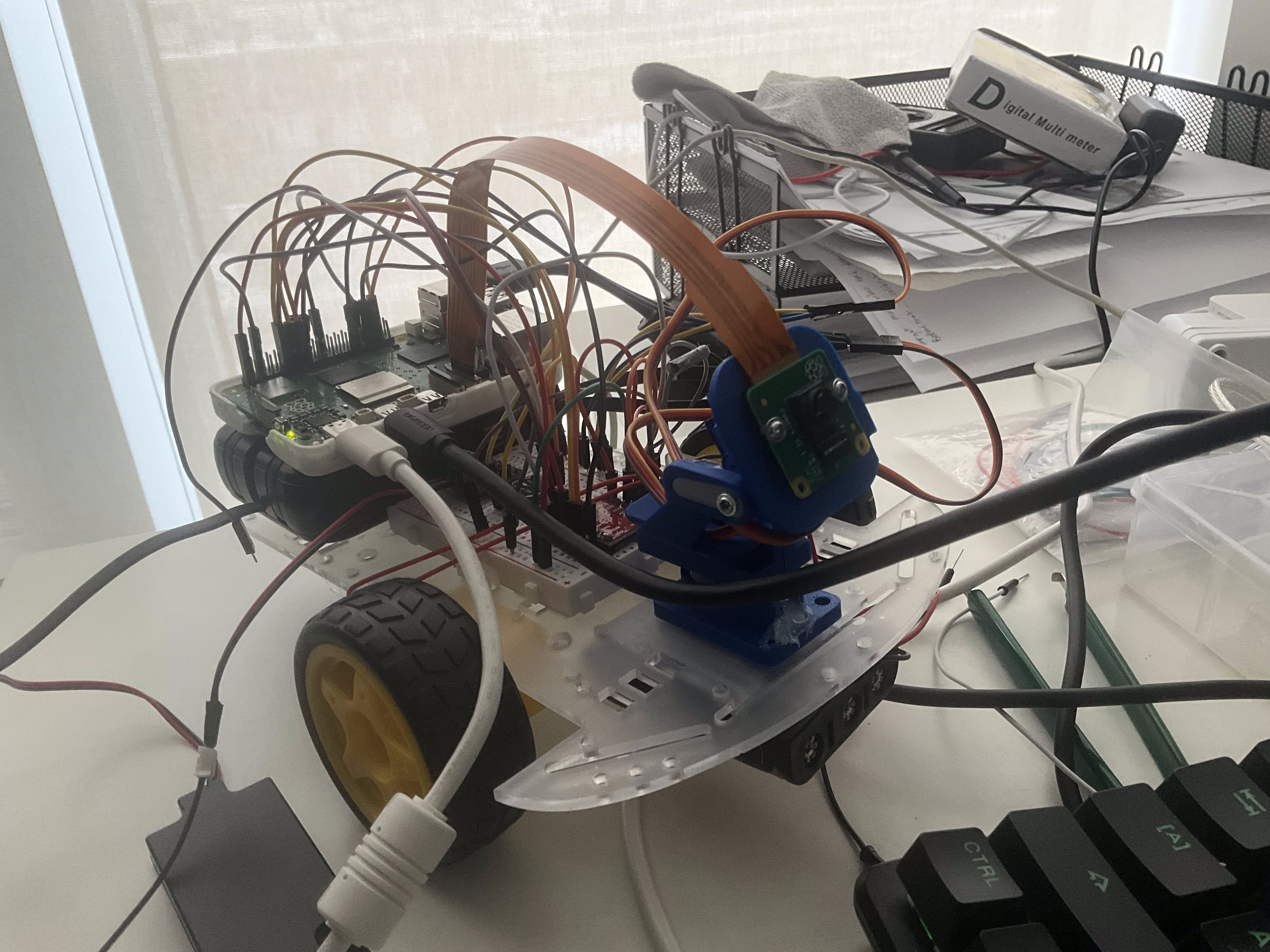
Rover Overview
-

Rover Sideview
-
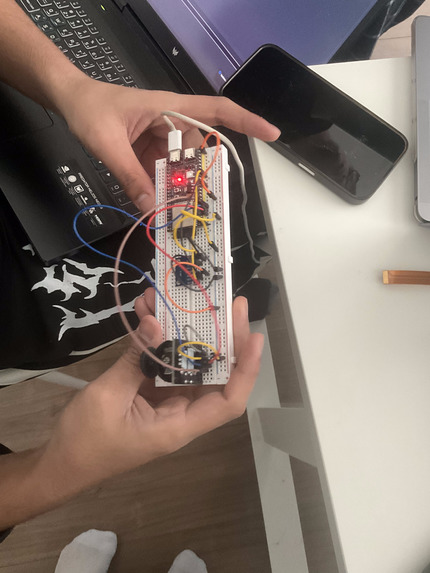
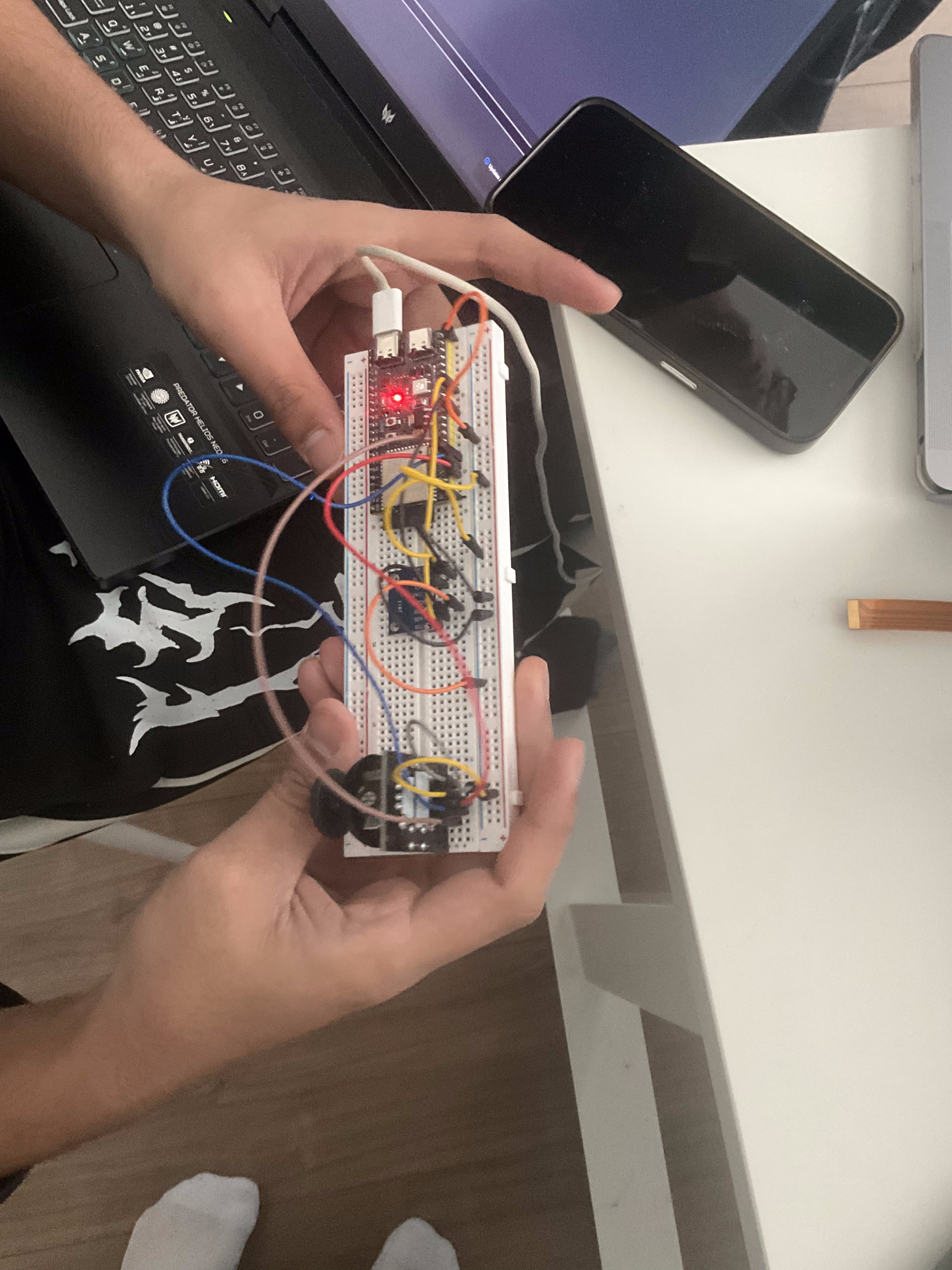
Remote Controller Overview
-

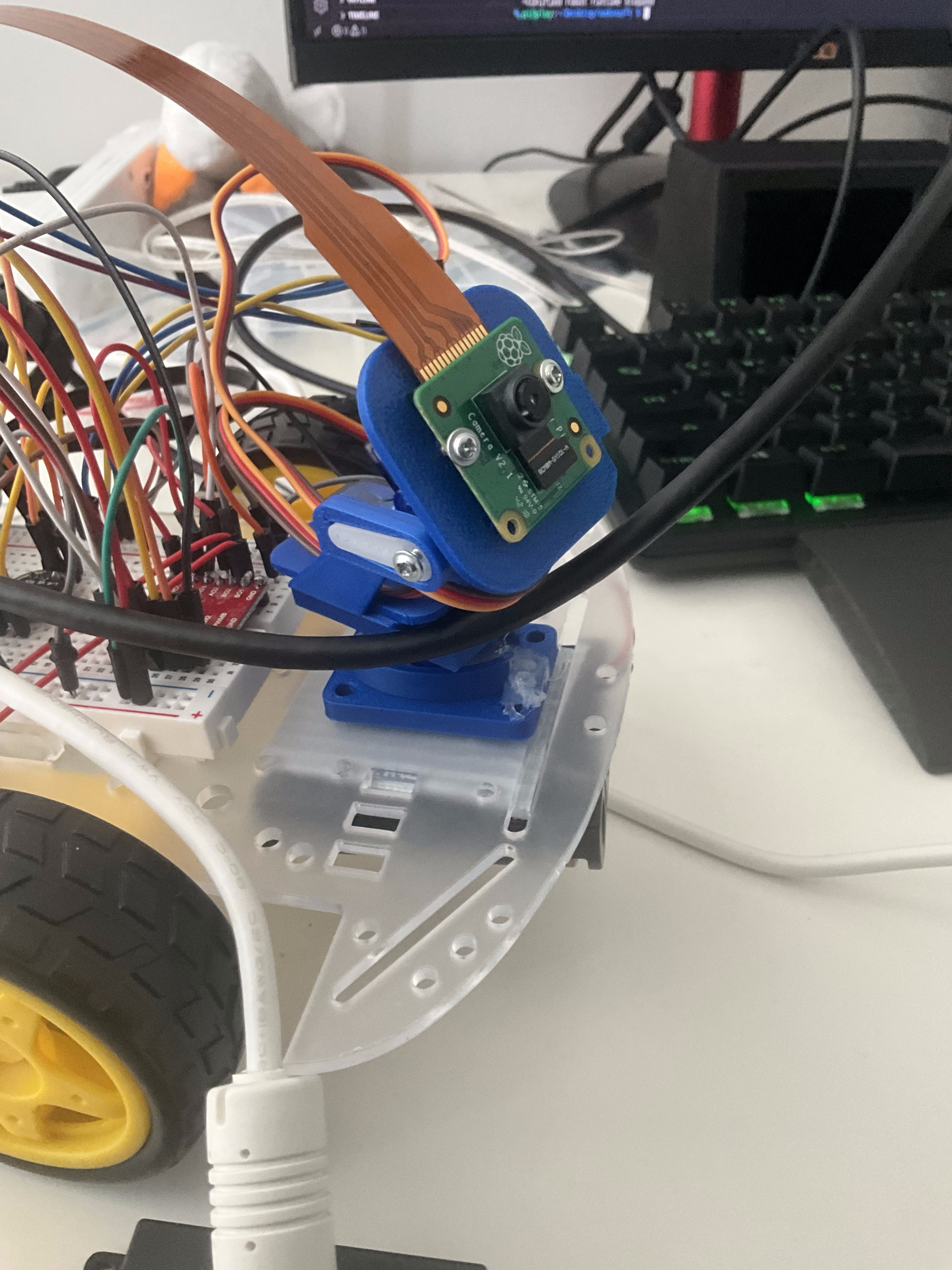
Camera Pan Mount
-
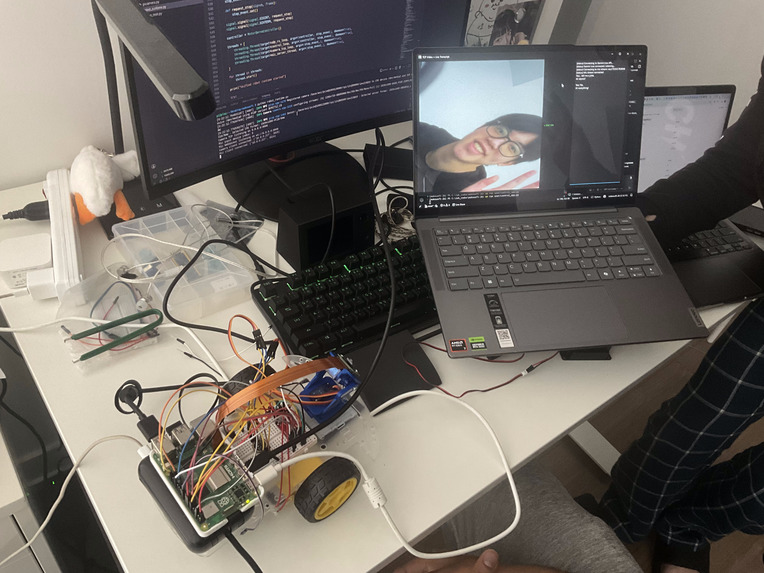
Camera Detection
-
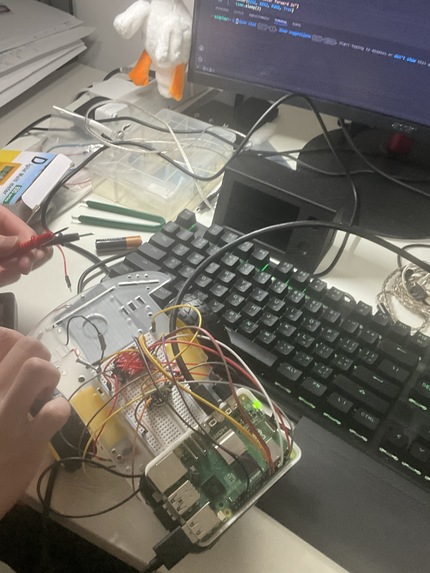
Hardly working at 3AM
-

WE THE BEST MUSIC




Inspiration
In disaster zones, reaching survivors is often limited by dangerous conditions. We wanted to create a tool that extends human presence into these environments without putting anyone at risk. DRIFT is designed as a remote scout that can identify people, assess potential threats, and maintain real-time communication between survivors and operators.
What it does
DRIFT is a disaster-response scouting rover that explores hazardous environments, identifies registered survivors, flags potential threats, and enables real-time voice communication between operators and victims. A pan-mounted camera provides precise situational awareness, while intuitive tilt-based controls allow the operator to move naturally. Survivors can speak directly to rescuers through the rover, turning DRIFT into both a scout and a communication bridge that increases survival chances while reducing risk to first responders.
How we built it
We built DRIFT around a mobile rover platform powered by a Raspberry Pi, integrating a servo-controlled camera mount for active scanning and a weighted tilt remote for intuitive movement control. Computer vision is used to recognize registered survivors and distinguish unknown individuals. A microphone and speaker system enables live two-way audio communication. The system combines embedded hardware, real-time video streaming, and network communication to create a responsive remote scouting platform designed for high-stress environments.
We divided the rover into core subsystems and assigned each team member ownership of a different aspect, including vision and recognition, mobility and control, hardware integration, and communication. While each person focused on their module, we constantly tested together, integrating components step by step. This parallel workflow let us move fast while ensuring every system worked as a cohesive whole rather than isolated parts.
Challenges we ran into
One of our biggest challenges was thermal performance. The Raspberry Pi heated up quickly under continuous camera processing and AI workloads, which caused throttling and inconsistent performance. We had to redesign to optimize processing loads, and carefully balance real-time recognition with stable operation. Integrating hardware, software, and networking in a live rover environment also introduced latency and synchronization issues that required constant debugging under time pressure
Accomplishments that we're proud of
We successfully integrated multiple advanced APIs into a cohesive, fully functional rover platform. By combining vision processing, communication protocols, and AI services, we demonstrated the potential of modern software ecosystems when applied to physical hardware. Beyond the technical achievement, our most significant accomplishment is developing a project with practical and real-world applications. DRIFT represents a technological advancement in creating solutions capable of assisting people in disaster response and survival scenarios.
What we learned
We gained a deep understanding that effective communication between microcontrollers and subsystems is just as critical as the intelligence of the software itself. Ensuring reliable data transfer, synchronization, and timing between hardware components was essential to achieving smooth and predictable rover behavior. This project strengthened our ability to identify and address bottlenecks, manage real-time communication, and debug complex interactions between hardware and software, skills that can only be developed through building fully integrated systems under real-world constraints.
What's next for DRIFT - A scouting rover for humans connection in survival.
Emotion-aware survivor assessment - We plan to integrate Presage to analyze vital signals and emotional state in real time, allowing the rover to distinguish between injured, panicked, or stable survivors. This would help operators prioritize rescue decisions and better understand survivor needs without requiring physical contact.
Fully autonomous communication loop - By combining Presage insights with Gemini’s reasoning and ElevenLabs voice synthesis, DRIFT could automatically generate context-aware responses to survivors. The rover would be able to reassure, guide, or instruct people without waiting for operator input, enabling faster intervention in high-stress scenarios and reducing communication delays.
Terrain-ready mobility upgrades - Replacing wheels with treads would improve traction and stability in rubble, mud, and uneven disaster environments. This upgrade would allow DRIFT to access areas that are currently unreachable and operate more reliably in real-world rescue conditions.
Built With
- c++
- elevenlabs
- geminiapi
- presage
- python
- raspberry-pi
- ubuntu

Log in or sign up for Devpost to join the conversation.