-
-
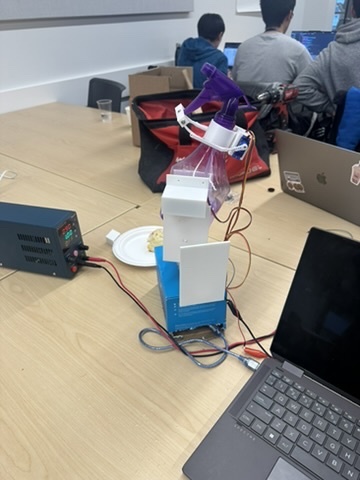
Spray robot
-
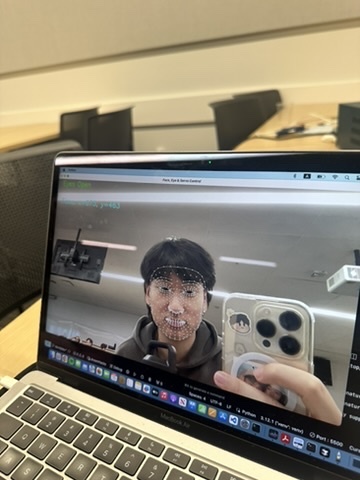
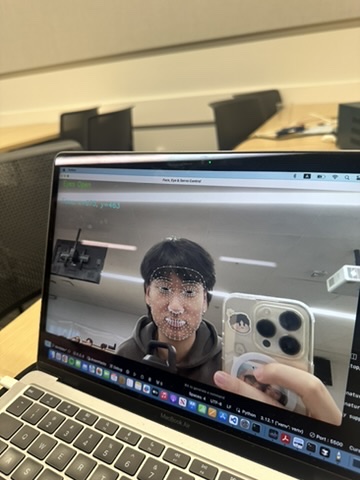
Face tracking eyes open
-
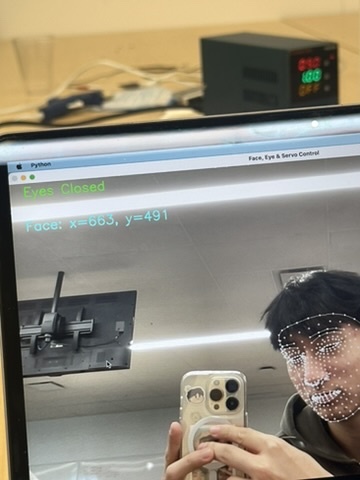
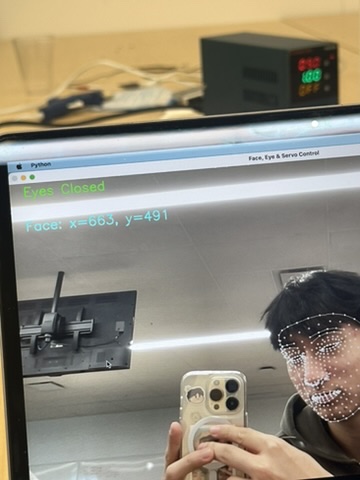
Face tracking eyes closed

Inspiration
We were brainstorming about dreams we wish we could achieve. The dream of staying up and pulling an all nighter without getting sleepy.
What it does
Our robot uses openCv to detect eye coordination and face detection so it can detect where your face moves and if you eyes are closed or not. The spray bottle tracks and follows your face. When your eyes are closed for longer than 6 seconds, a servo pulls the spray bottle trigger and sprays water in your face.
How we built it
We built it using servos, 3d printed parts, arduino, and wiring. For the front end application whcih we were trying to run the robot on, it was done using socket programming using clients and servers.
Challenges we ran into
We were unable to finish the application end so we have to run through the terminal itself.
Accomplishments that we're proud of
We are proud that we were able to complete the robot, and it calibrates and moves relative to the face movement so water is shot directly on the face.
What we learned
I learnt how to use and trouble shoot open cv, as well as how the whole arduino system works with the hardware
What's next for Dream Crushers
improve the project further and make it more complex, perhaps a voice and speaker integrated so that it tells you to wake up w voice.







Log in or sign up for Devpost to join the conversation.