-
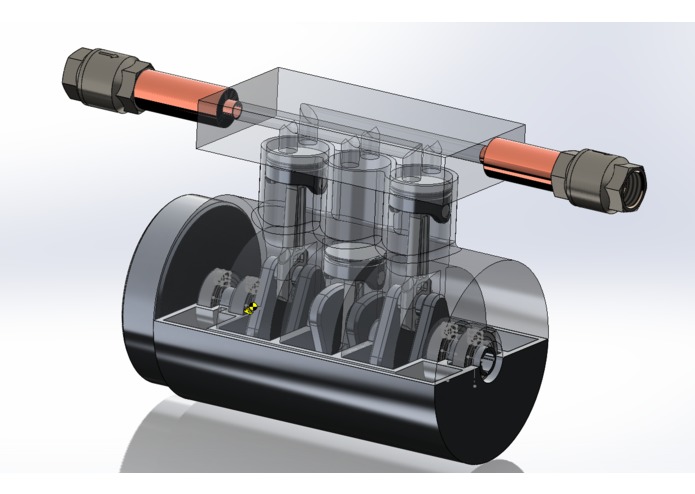
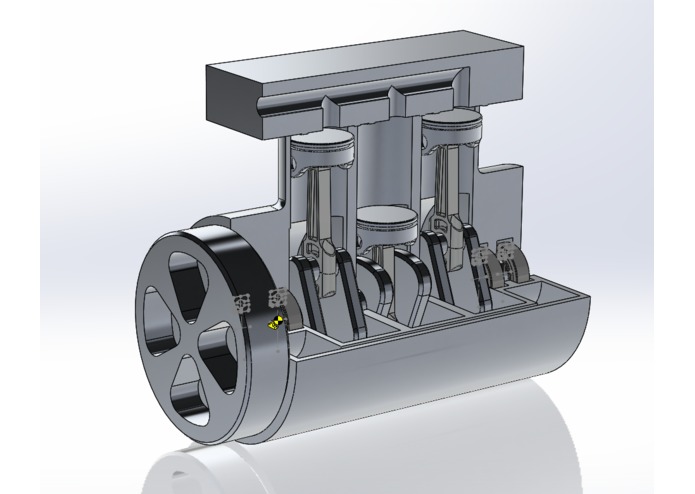
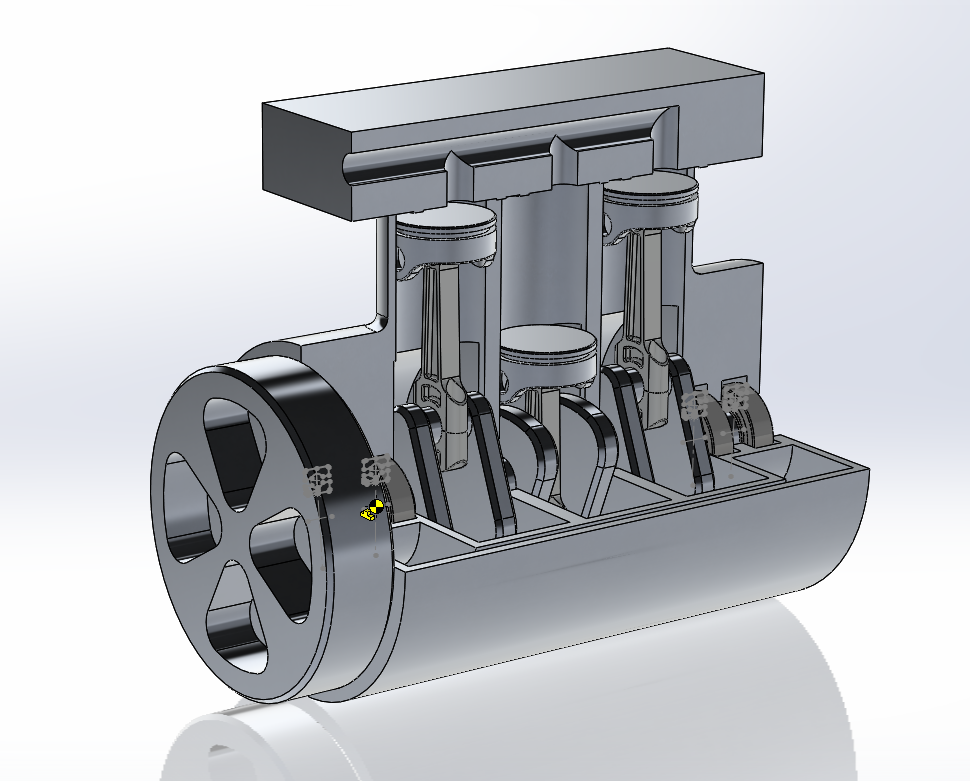
Compressor Full Assembly
-
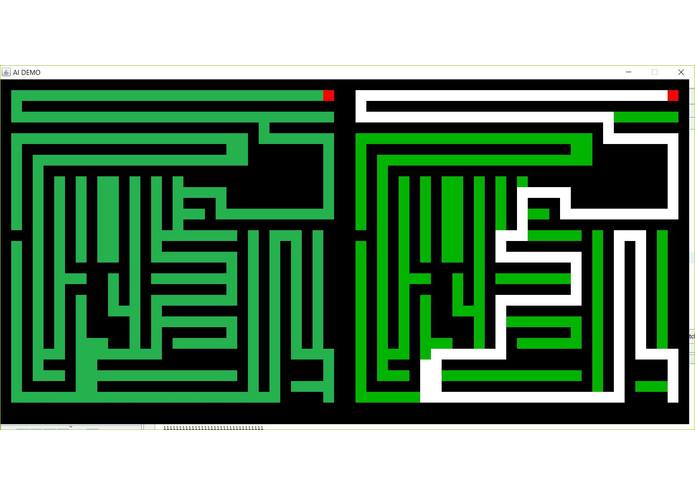
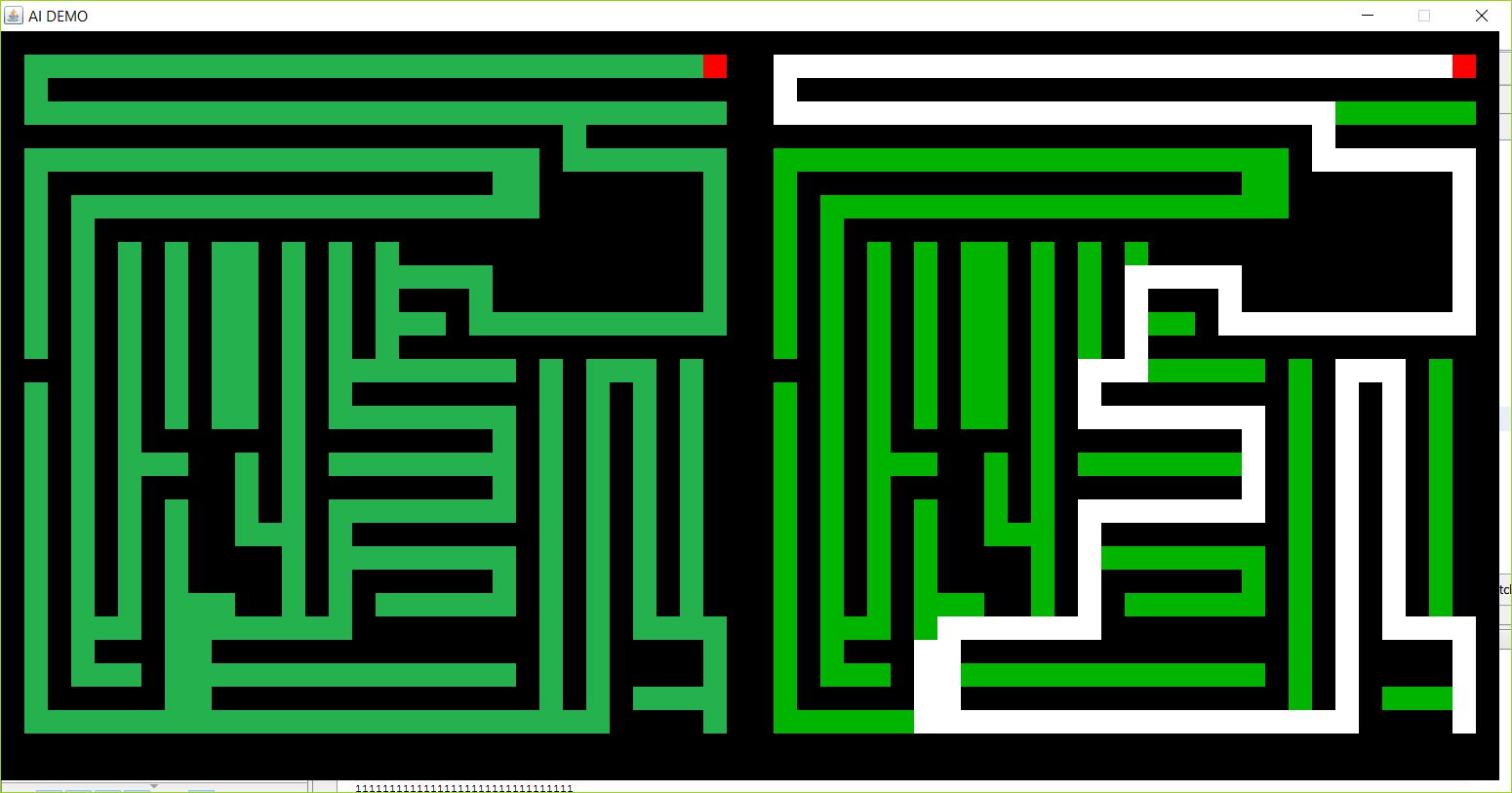
Mazerunner Algorithm Test
-
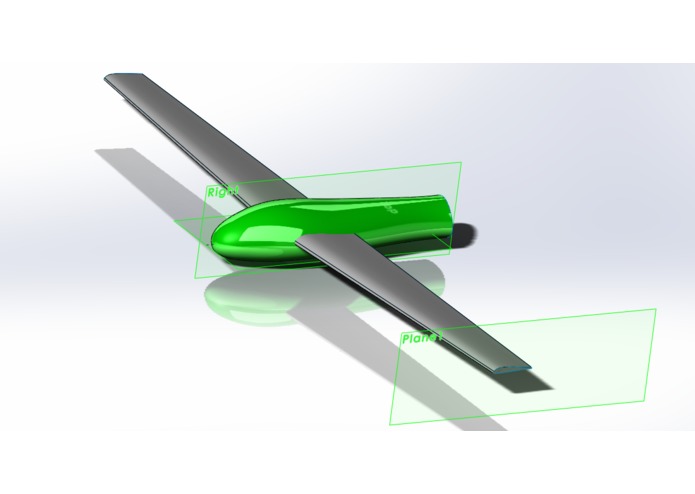
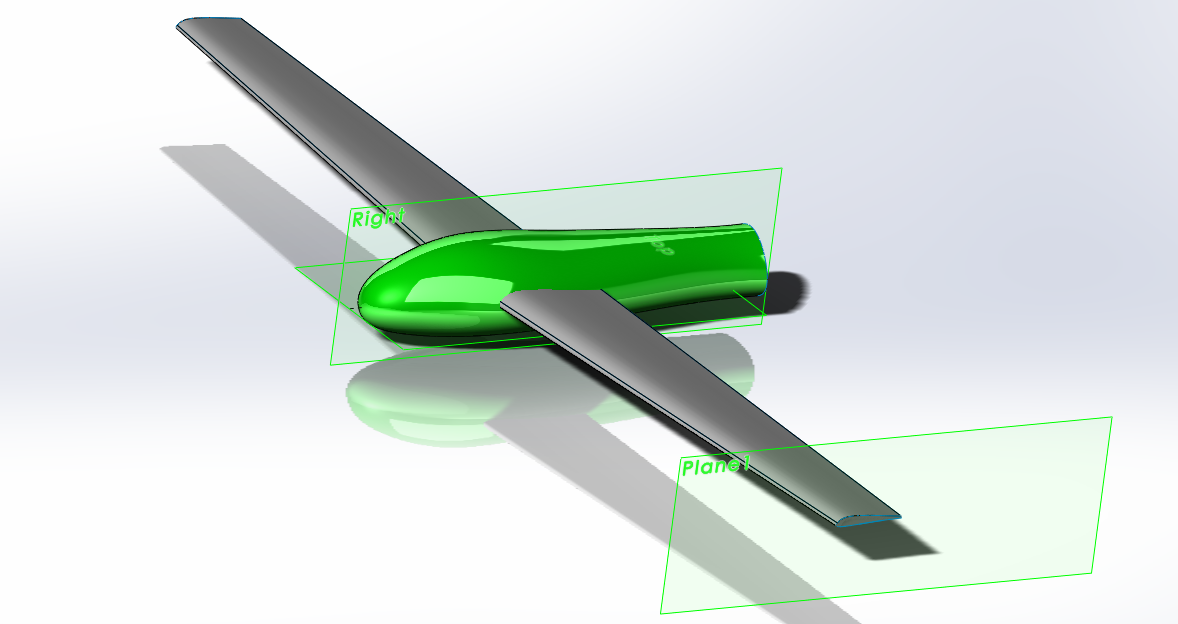
Early Phase Aerofoil
-
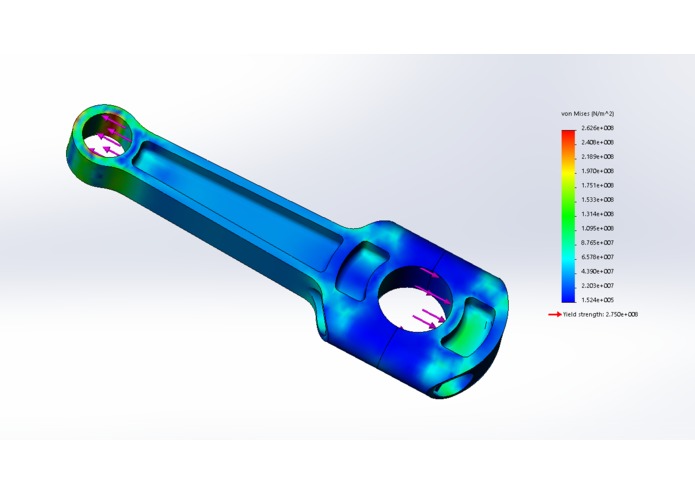
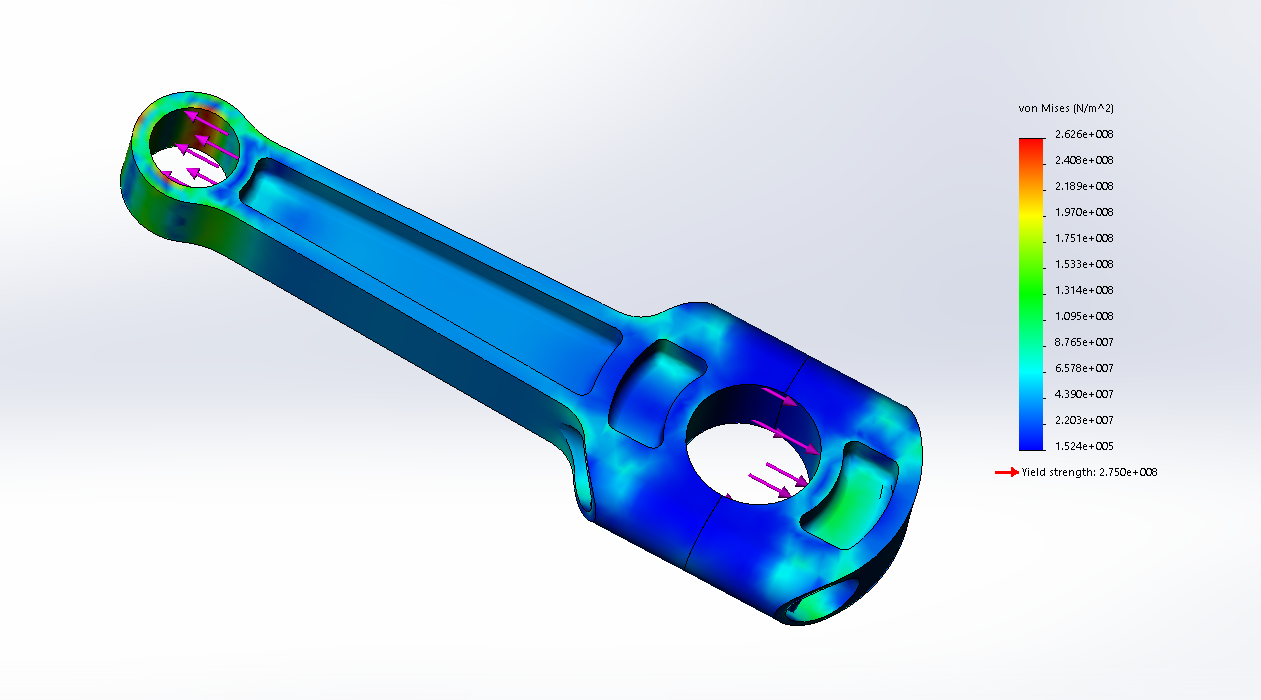
Connecting Rod Undergoing FEA
-
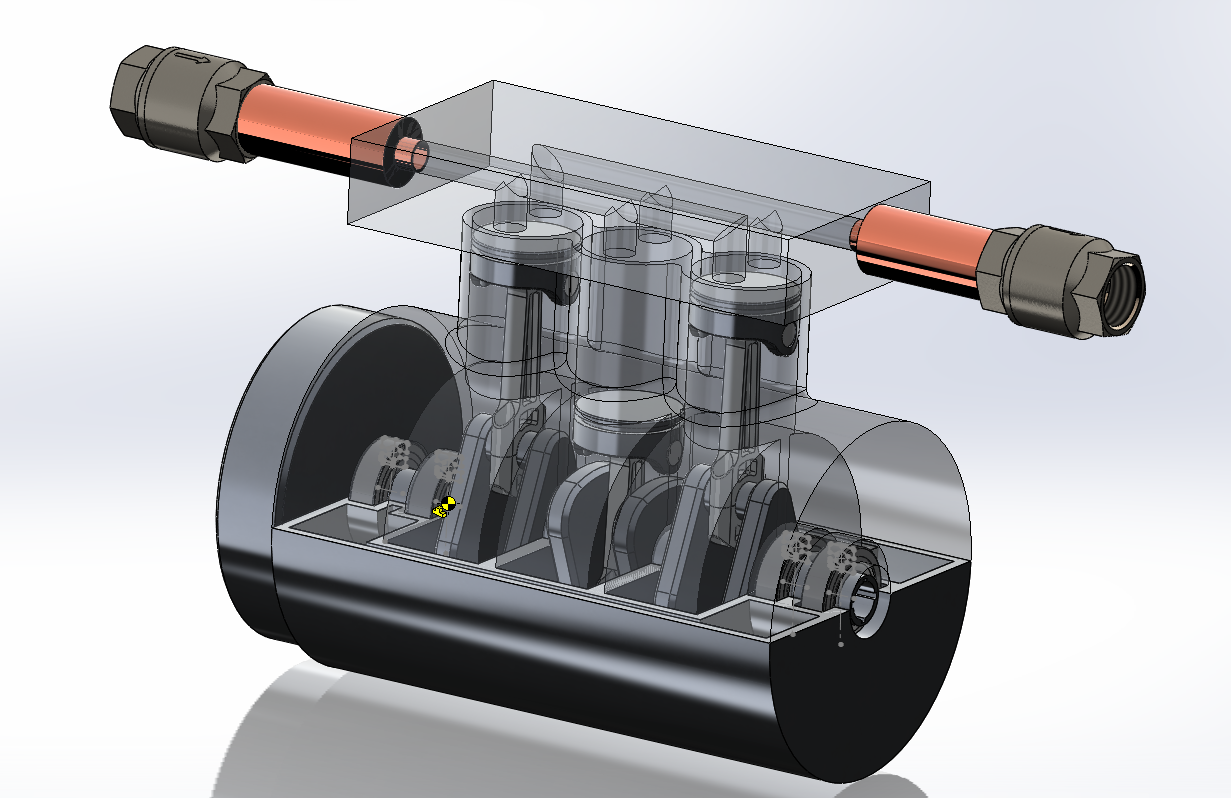
Assembly With Section View
Inspiration
Forest fires are on the rise. In 2015, the damage caused by wildfires increased by more than 10% from the previous record set in 2006 (iii.org). This meteoric rise prompts swift response, something that is not possible with the traditional approach. We designed a product that could take NOAA weather alerts for forest fires, generate an appropriate flight path, utilize thermal imaging software to identify hot spots, apply a high pressure jet of water to the hot spot and finally send an alert to the local fire authorities about the incident.
What it does
The project is divided into two parts, a mechanical and software component.
The mechanical components are as follows: A hull for an autonomous UAV, a set of thermal imaging sensors, an onboard computer, and a high pressure water jet with compressor. The onboard computer would be programmed to autonomously fly a path based on NWS-NOAA warnings for forest fires, searching the ground for hot spots that could spontaneously combust. When it finds a location with such a heat concentration, the UAV would attempt to fire a jet of water at the hot spot to reduce the temperature and send a warning to local fire authorities about the incident so that the authorities could respond to such threats earlier and with more precision than conventional means.
We ran a simulation in which the "drone" gets around "forest fires". Essentially, we created a simulation in which an object tries to navigate a large maze without having data regarding the whole maze. In other words, its knowledge of the maze improves as it explores the maze. The software is the path finding algorithm that would, given a 'maze-like' flight path, autonomously navigate with high efficiency to the end of the maze.
How we built it
The mechanical components were designed in SolidWorks 2016. The parts were designed to use standard components wherever possible (standard end mills, drill bits, etc.). The compressor was the main deliverable that worked on during the hackathon. The compressor has a displacement of 26 cubic inches and can be powered by an electric motor up to 5000 rpm, giving a maximum volumetric flow rate of 75.23 cubic feet per minute of water. The exit velocity of that flow rate through a one inch nozzle is approximately 230 feet per second. This flow rate would instantly cause a rapid cooling of the surrounding area due to the high specific heat of water and increase the amount of time that fire personnel have to get to the scene before a fire gets out of hand.
The simulation for the drone's intelligence was built purely in Java. We used the main Java libraries (the big 5). We looked up algorithms that enabled the drone to navigate the maze, and incorporated those.
Challenges we ran into
We chose to design the compressor mostly out of Aluminum 6061-T6 alloy because of its durability, low cost, and low weight, all of which make the material a prime choice for use in a project such as a medium scale drone. Given that we had a significant weight restriction for our drone (even experimental drones can only carry a roughly 130 lb payload, and most commercial compressors are well over that weight limit).
Another problem we faced was creating manufacturable designs. We determined that some parts just had to be cast while others could be machined. For example, the crankcase must be cast because of its geometry and numerous curved features, however the connecting rod and piston can be machined. We also had to balance the cost of multiple manufacturing methods (cast then machine) vs single method manufacturing (which would have taken significantly longer). Tolerancing for manufacturing was also difficult, as it is difficult to predict what abnormalities might take place during the manufacturing process.
Although the maze is being solved, we cannot visually see the maze being solved. Rather, the correct path is simply outputted. This may not make the simulation seem as exciting.
Accomplishments that we're proud of
With regards to the mechanical design of the project we are proud that all our safety factors for our connecting rods, crankshaft, flywheel, and pistons were above one and the designs for all these parts were weight reduced according to feedback from FEA. The connecting rod experienced a 19% decrease in weight from its initial design and had decreased machining time according to HSMWorks.
The AI was hard to build. We had to improve our knowledge of recursive programming, and research algorithms to allow the "simulated drone" to navigate well through the obstacles.
What we learned
Mechanically we learned how to analyze force systems in both SolidWorks' Simulation environment as well as generate force plots using MATLAB with inputs taken from SolidWorks' part files. We learned how to apply computing techniques to verify designs as well as use programs to increase their efficiency. Additionally we toleranced parts for press/translation fits as well as model dynamic loads on bearings. Bolted connections and bolt preloads were also simulated in the design validation phase.
On the software side, our knowledge of MATLAB and general logical thinking in any language (in this case JAVA) vastly improved.
What's next for DragonFly
The next step for DragonFly is to design attachment points for the compressor, design the sensor assembly, as well as complete the UAV hull that is currently in the initial phases of design. We will need to evaluate each component in just the same way as we have done for the compressor itself, for weight, strength, and cost to determine the best possible solution.
For software, we will try to identify more "intelligent" algorithms, rather than the current "depth first search" algorithm we have working. Currently the simulated drone does not necessarily try to take the shortest path.
Built with
Dassault Systemes SolidWorks
- Simulation
- PhotoView 360
- HSMWorks
- Flow Simulation
MathWorks' MATLAB
Sun Microsystems Java
References
Pitts, Robert I. “Recursion: Solving a Maze.” BU CAS , 1998, www.cs.bu.edu/teaching/alg/maze/.
Built With
- java
- solidworks




Log in or sign up for Devpost to join the conversation.