-
LiFi - Car communicating with Traffic Light
-
Example of full vehicle swarm communication
Inspiration
We, rather unconventionally, started thinking about cybersecurity and enterprise-level solutions for communication. Apps like CyberDust let you communicate with no trace of the conversation ever happening, but the long known vulnerability point remains; wifi routers.
And that's where the topic of LiFi came up. LiFi technology uses a light source, say a lightbulb, that turns off an on to transmit binary to your local devices. You've probably been exposed to Fibre Optics before, but the potential for the technology hasn't been reached, and that's why we decided to take LiFi out of the ground. We used LiFi tech to tackle the vehicle swarm that autonomous car advocates have been dreaming of while creating new avenues for IoT that have not yet been recognized.
Our team goal was to brainstorm how Industry 4.0 impacts us on the surface level instead of the back end:
1) What is the first connection from us or our devices to the IoT systems?
2) How can we optimize it. Faster? Cheaper? Both?
3) Do we need to update our infrastructure? How much?
We're just around the corner from Industry 4.0, and what some call the next industrial revolution. But for those of us who aren't visionaries with big dreams, the world will be hindered by its existing infrastructure and systems. We look at the future as if it is filled with robots, but so far it's been designed for humans. Therefore, it was essential that our robotic design seamlessly integrates with human-centric design.
Through this thinking, we focused on integrating this technology into vehicles and thought about the specific use cases that Light-Based Communication can be used for.
The speed at which the light flicker on and off are undetectable to the human eye, making it completely unnoticeable for our vehicle headlights to be communicating with our traffic lights. This means that, with globally familiar infrastructure, we could have the capability to have our traffic lights detect how many cars are in a lane simply by communicating with the first car. That first car then asks the car behind it, and so forth until we get to the end and back, and now we know at any given time how many vehicles are at a traffic light all within a blink of an eye. You'll never have to miss an advanced left turn signal again. You'll never have to conduct an expensive traffic study again.
For the vehicle itself, integrating communication inside the headlights acts as another "sensor" for autonomous cars. Communication between vehicles will be quick and local, so that each individual car does not need to rely on its own sensors to make a decision. Once an emergency is detected, the lights can act as a panic signal to the surrounding vehicles to act quickly when milliseconds count. They can also act as a reassurance for vehicle systems. Instead of just relying on ultrasonic sensors for how quickly a vehicle is braking, what if the lights also told you how drastically the vehicle is braking? Light-based communication would not be a standalone sensor, but it would act as a strong catalyst in the system to increase the overall performance of autonomous vehicles.
Best of all is the opportunities in the world surrounding vehicles. You could know if your mailbox was full or not simply by driving past it. Your car could be provided the speed limit locally instead of relying on GPS data that may or may not be up to date. Your car could navigate around a construction area exactly as its supposed to without needing several moments of driving data to do it perfectly. You could drive through a McDonald's drive-thru line and never have to open your window; the menu and payment process opens up on your infotainment system as you get in the line, without every device involved having to connect to the internet.
Of course, much of this can be done today. What is important to remember is that robots need robot-centric design, because you can only go so far if you limit robots to reading human-centric design. Your car can read the speed limit off of a camera, but it's much safer and more reliable if the car could do it in a way designed for the car instead of for you.
This was the high level of our idea, and the two-day project painted the beginning glimmers of that vision into reality with a demonstration. We created a prototype neighbourhood, where you could see the following simulations:
1) Mailbox
This simulation showcased a simple integration into real life and the basic idea of Light-based data transfer. Your mailbox sends out a signal to your car saying "I'm a mailbox, I'm here", to which your car responds "My mailbox is number X, do I have mail?". Your smart mailbox would send back the answer.
2) Drive-Thru
The simulation showcased the versatility of light-based communication. Instead of just a few simple encoded messages, we sent a song to a speaker via lights and a solar cell, mimicking a system that could be like your menu opening up on your car screen.
3) Traffic Light
The simulation showed a few more examples of how the technology can be used and beneficial to implementing SmartCities. Communicating with the vehicles allowed the light to gain data such as how many cars there are, the direction of each car, and any other pertinent data that may be necessary, allowing transportation grids to accommodate and reconfigure for the needs of the moment.
What it does
It's a hardware hack, so our demoStreet&City showcases a simple LiFi data transfer system between vehicles and infrastructure like traffic lights. The same approach can be taken to communicate with other infrastructure of course, but also mailboxes, drive-throughs, and other common consumer pain points. As another data source for autonomous cars to understand, it reduces the reliance on any one sensor in the vehicle.
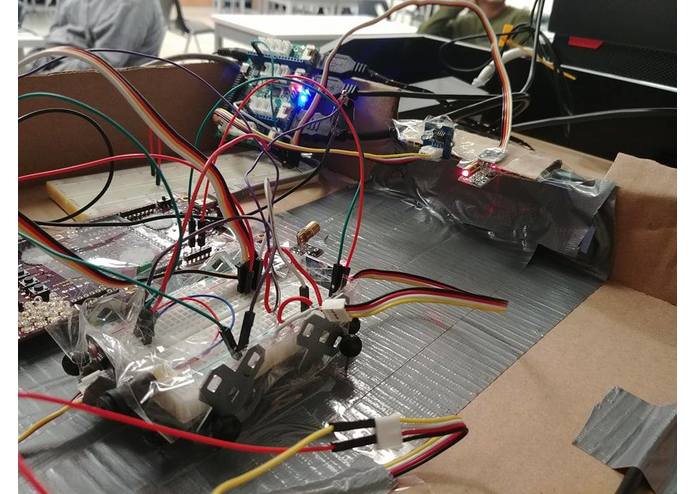
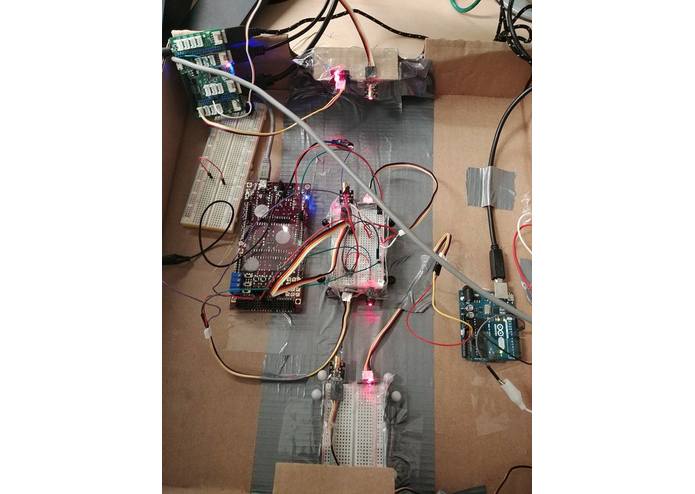
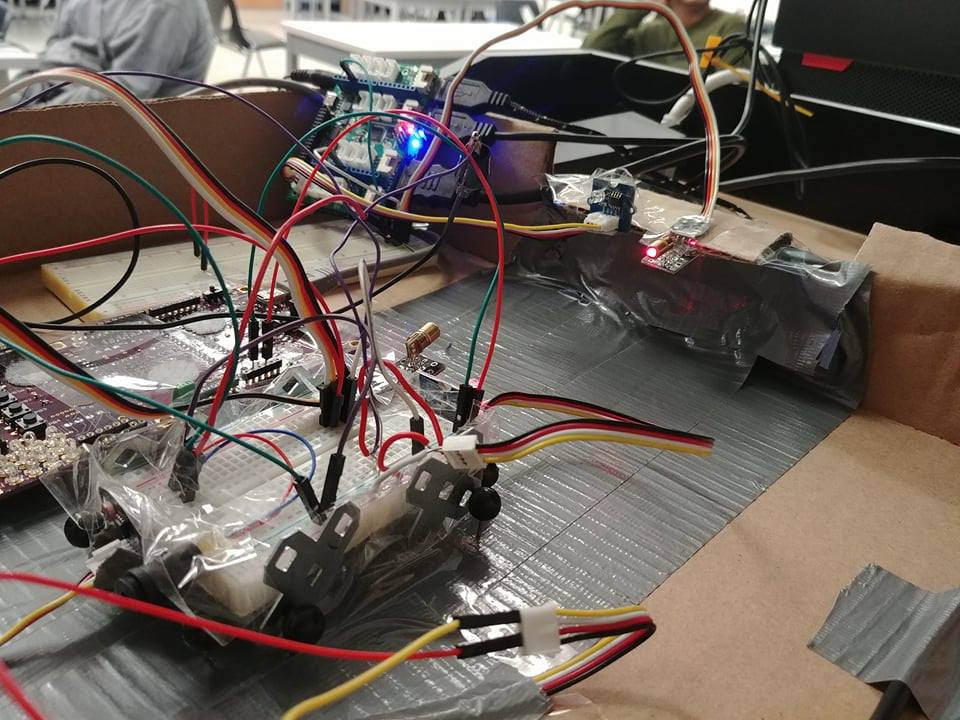
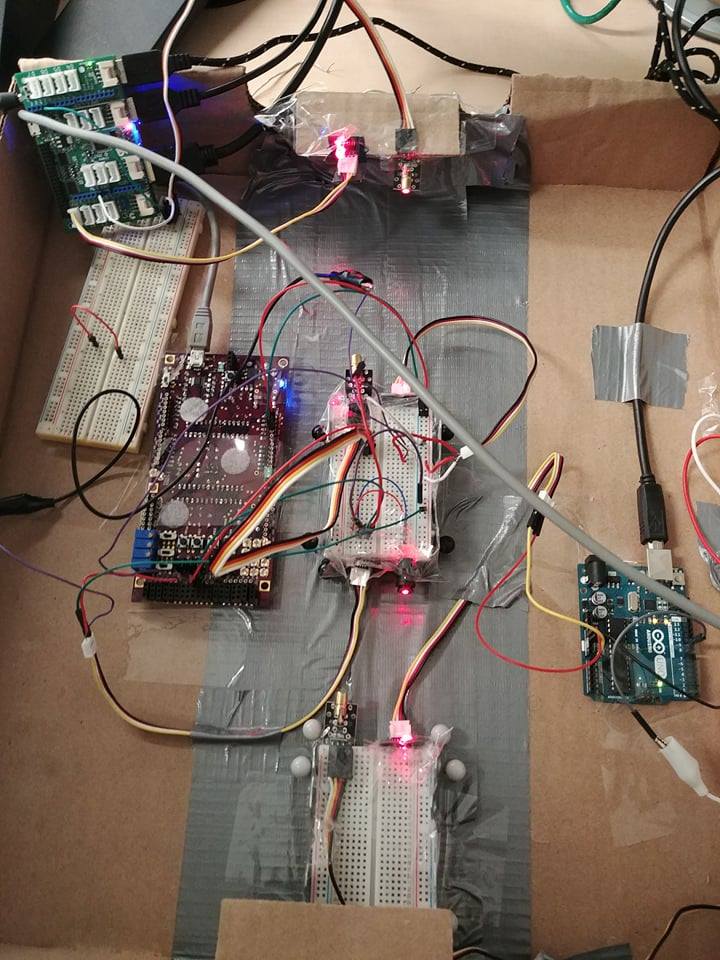
How we built it
We took a system of lasers, LEDs, and photoresistors to 3 Arduino boards. A few control system libraries later, we got a python script up and running to showcase the data our system collects in real time.
Challenges we ran into
This is a hardware hack, no need to say more. Our tears may or may not have short-circuited our board.
What we learned
We took light, turned it into a voltage, to 1s and 0s, to an encoded language, to an Arduino serial monitor, to a python script on a DragonBoard to a web server. There's too much to list here.
Accomplishments that we're proud of
See above question please.
What's next for Dolorean comes to Lifi
We'll try and get 4k video through an open connection instead of a cable so that you can set up projectors properly, even after your basement is built.
Built With
- arduino-c
- arduinomega
- arduinouno
- dragonboard-410c
- hardware
- laserbeams

Log in or sign up for Devpost to join the conversation.