-
-

Auto Dog Feeder
-
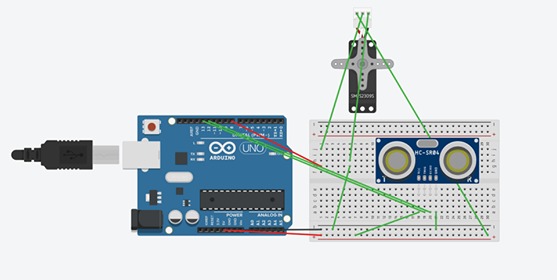
Auto Dog Feeder Circuit
-
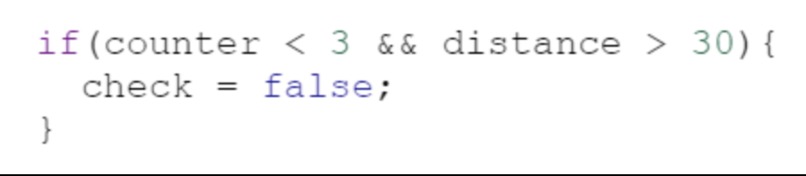
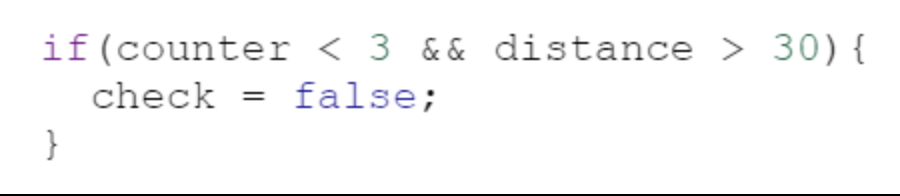
Code Part 3
-
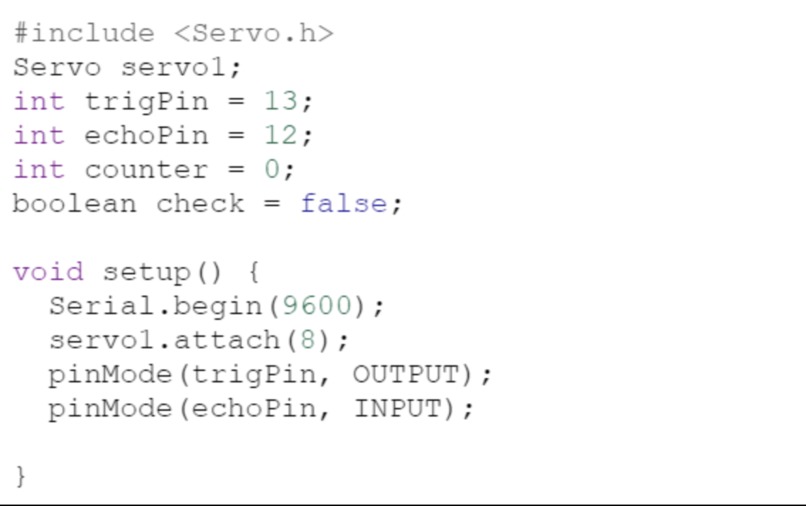
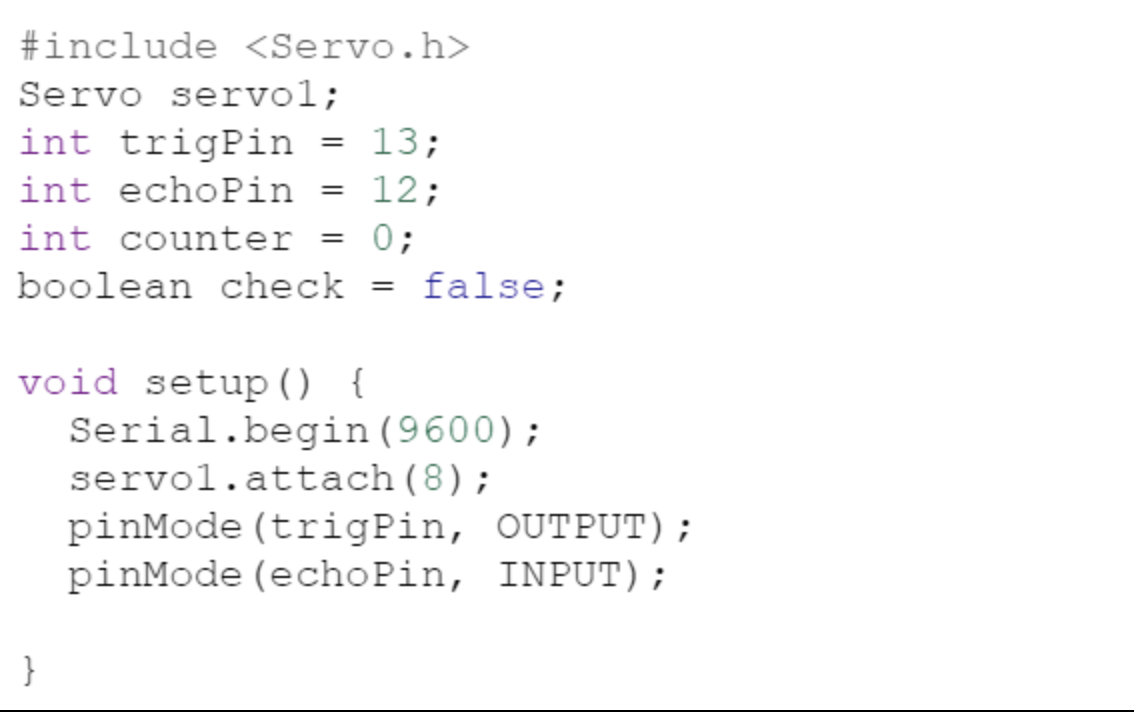
Code Part 1
-
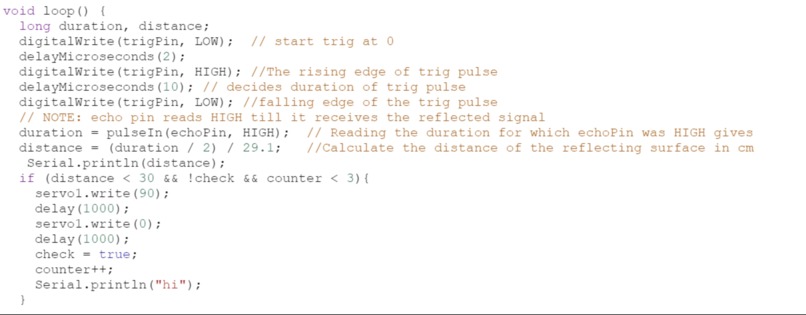
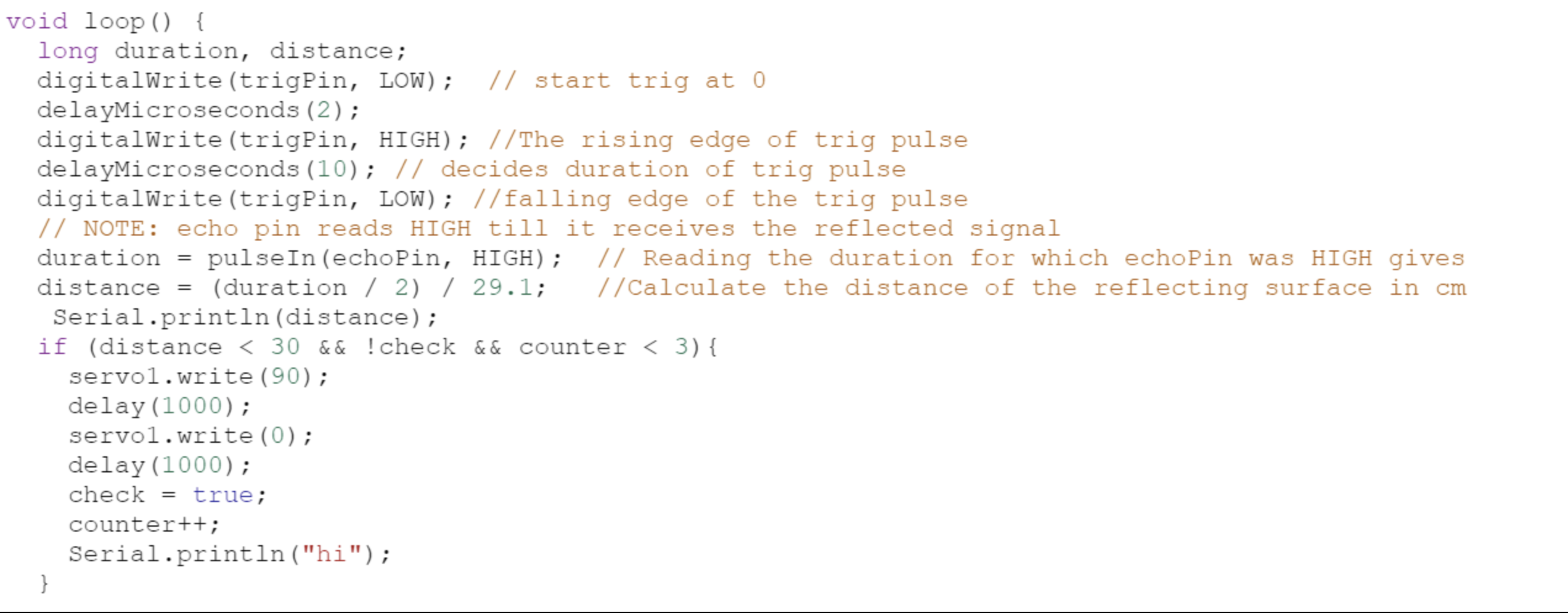
Code Part 2


Our Idea
Inspired by our personal pets, we decided to base our project off of a mechanism that would make dog care easier. Constantly having to refill a dog bowl can sometimes be a burden for the dog owner. Our solution lifts this burden and ensures the dog gets the nutrition it needs. As shown in our demo video, our TinkedCAD project uses a motion sensor to sense when a dog comes near the dispenser. When the dog comes within 30 cm of the motion sensor, the dispenser releases dog food. The dog must move at least 30 cm away from the dispenser before returning for another meal. Furthermore, the last segment of the video shows that there is a cap on how many times the dog can dispense dog food daily, which avoids overfeeding. This solution would save us time if implemented in our households, and therefore we thought it would be a good idea to move forward with for our ESE 190 final project.
The Process
We wanted to create something simple, yet useful. With this goal in mind, we included a motion sensor as well as a rotating mechanism, which are the two main mechanisms to create our efficient dog food dispenser. Using TinkedCAD was challenging at first since we did not have a physical environment that would allow us to visualize our circuit board. We were initially unable to connect the motion sensor to the food dispenser, but we found success after consulting the tutorial section of TinkedCAD. Also, to make our dog feeder even more hands-off, we wanted to implement some sort of feature that would allow the dog owner to not have to worry about filling the dog bowl multiple times per day. Thus, we implemented a limit on how many times the dispenser will release, which fulfilled our secondary objective.
Hardware / Software
Hardware: Our circuit board consists of two main mechanisms. There is a rotating dispenser that is used for the food, which locks up after the dog dispenses the maximum amount of food. Simultaneously, there is a motion sensor that senses the dog when it comes within 30 cm of the circuit. Software: Part 1 of the code is the set up. We basically set the servos and the ultrasonic sensor to the ports. We also start the serial monitor so we can debug the ultrasonic sensor later on. Part 2 of the code is the main code. The chunk of code that is commented until the if statement is the code we used in Lab 4 to get the distance from the servo. We then go through the if statement and see if our conditions are met. That is if this is the first three times the dog is approaching the food and if the dog is less than 30 cm from the food. We also check to see that the dog has been past 30cm for a period of time to make sure that the food is not constantly dispensing in one go. After we dispense we change our boolean variable and the counter on the number of times we have dispensed. This brings us to the last part of our code. Here we check to see that the dog goes farther than 30 cm before we change our boolean variable back to dispense again. Again, this makes sure the second or 3 dispense of the food does not happen while the dog is there. After we dispense three times we will stop until the owner resets the machine for the next day.
For the future / What we would have added in person
We hope to work in the lab in future semesters to make our project come to life. If we had the opportunity to work on this final project in person, we would likely implement an actuator and put our circuit on wheels. We would connect the circuit to the dispenser using a bluetooth device, and make the dog work for its food. Furthermore, the dispenser would dispense dog treats rather than regular meals since the dog has to work to get close enough to the moving motion sensor. The dog would do this by following the moving circuit which we can control through our phones. Furthermore, when the dog finally catches up to the circuit, the motion sensor will be triggered which will release a dog treat at the original location of the dispenser. The dog could then return to the dispenser to retrieve its treat. This modified Auto Dog Feeder would therefore serve 3 distinct purposes: feed the dog, give the dog exercise, and train the dog to follow the device for its treat.

Log in or sign up for Devpost to join the conversation.