Inspiration
We were inspired by VR and AR systems
What it does
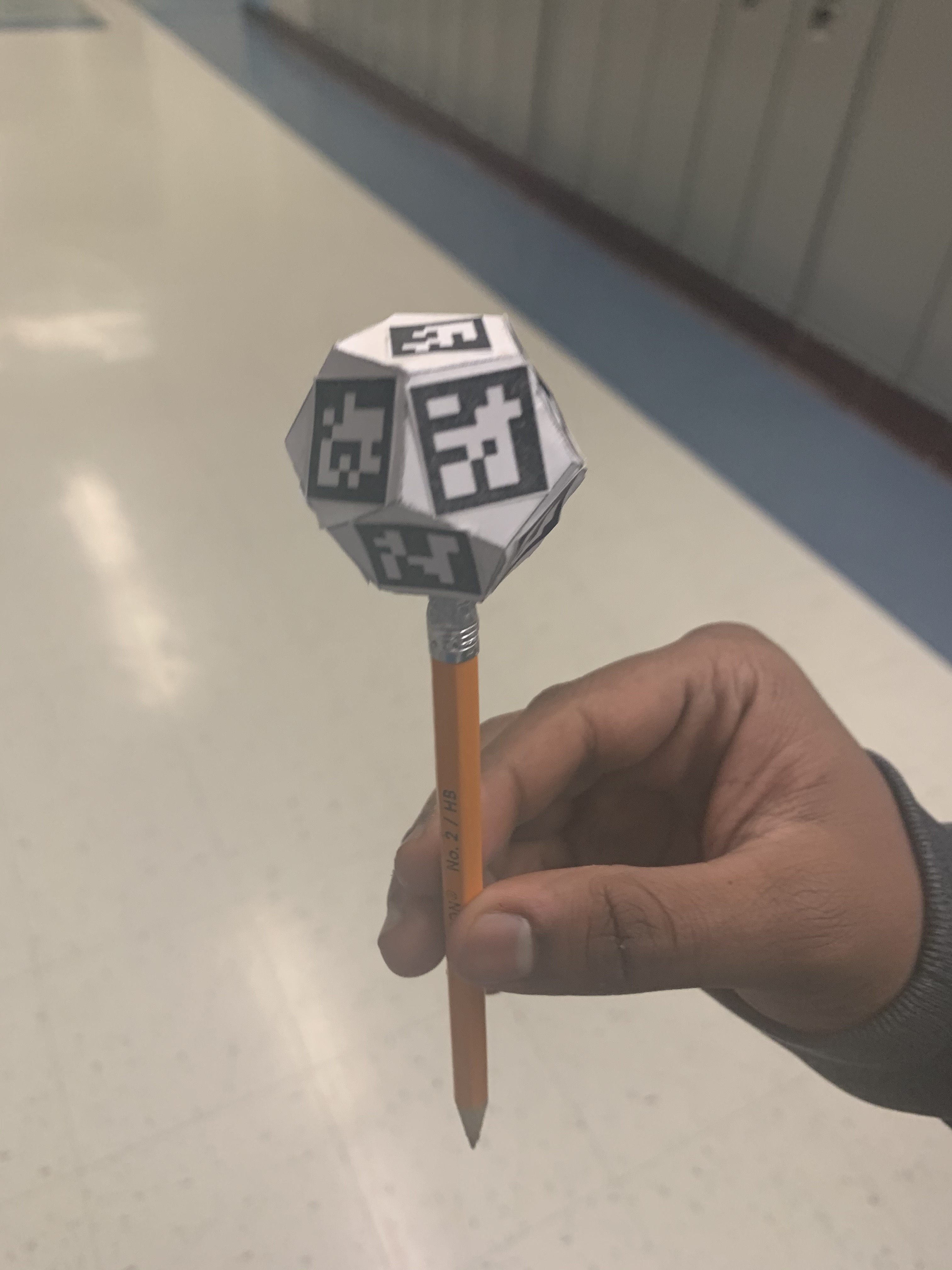
The DodecaTracker may be a robust passive tracking system that can be used for tracking nearly any real world objects using a single camera with photo recognition and marker classification
How we built it
We built the passive markers by generating them using a c++ code, The dodecahedron shape was picked because the it allowed two sides to be visible at all times allow us to use OpenCV's Aruco library to determine the 3d pose of the each marker
Challenges we ran into
The OpenCV library was unusable and the Aruco library had a corrupted cmake, preventing use from using the library, we instead used a prevois compiled application to test our physical object. Thus we were unable to finish the application.
Accomplishments that we're proud of
What we learned
We learned that we cannot solve all issues, since there is the possibility of the creators files being corrupted and no alternative being viable.
What's next for DodecaTracker
We are hoping to repair the cmake files and compile the library allowing us to continue the project and use this system for precise sub millimeter 3d pose estimation.
Built With
- android
- aruco
- failed

Log in or sign up for Devpost to join the conversation.