-
-
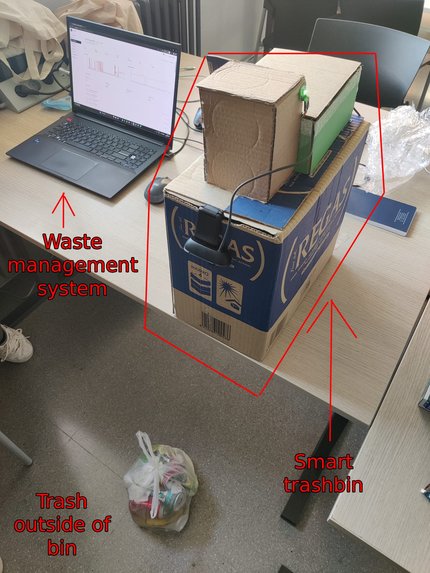
Project overview
-
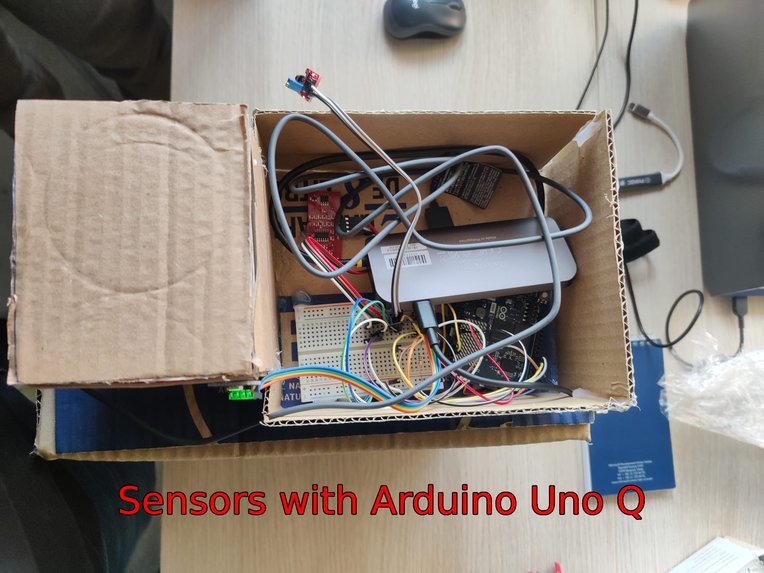
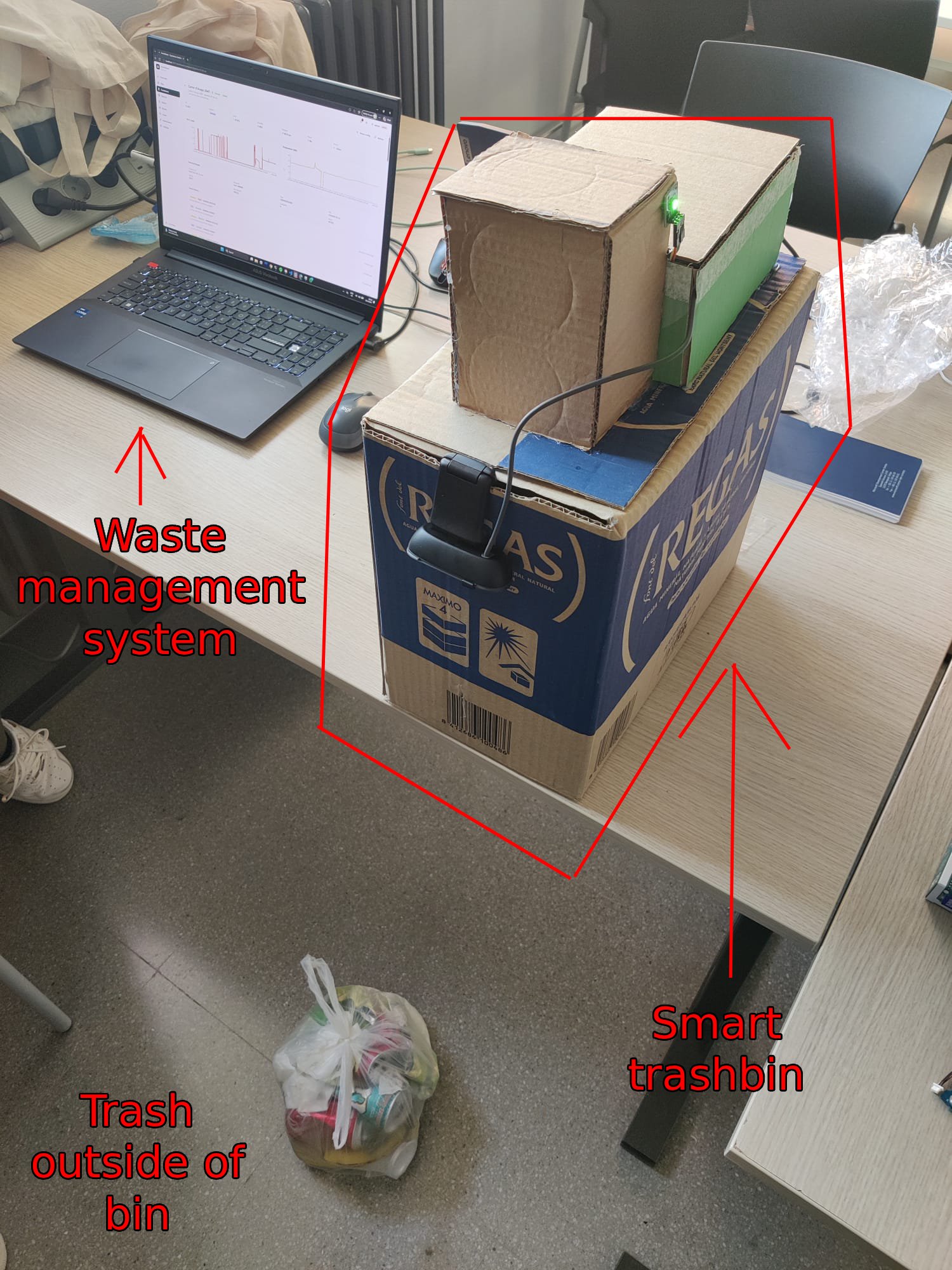
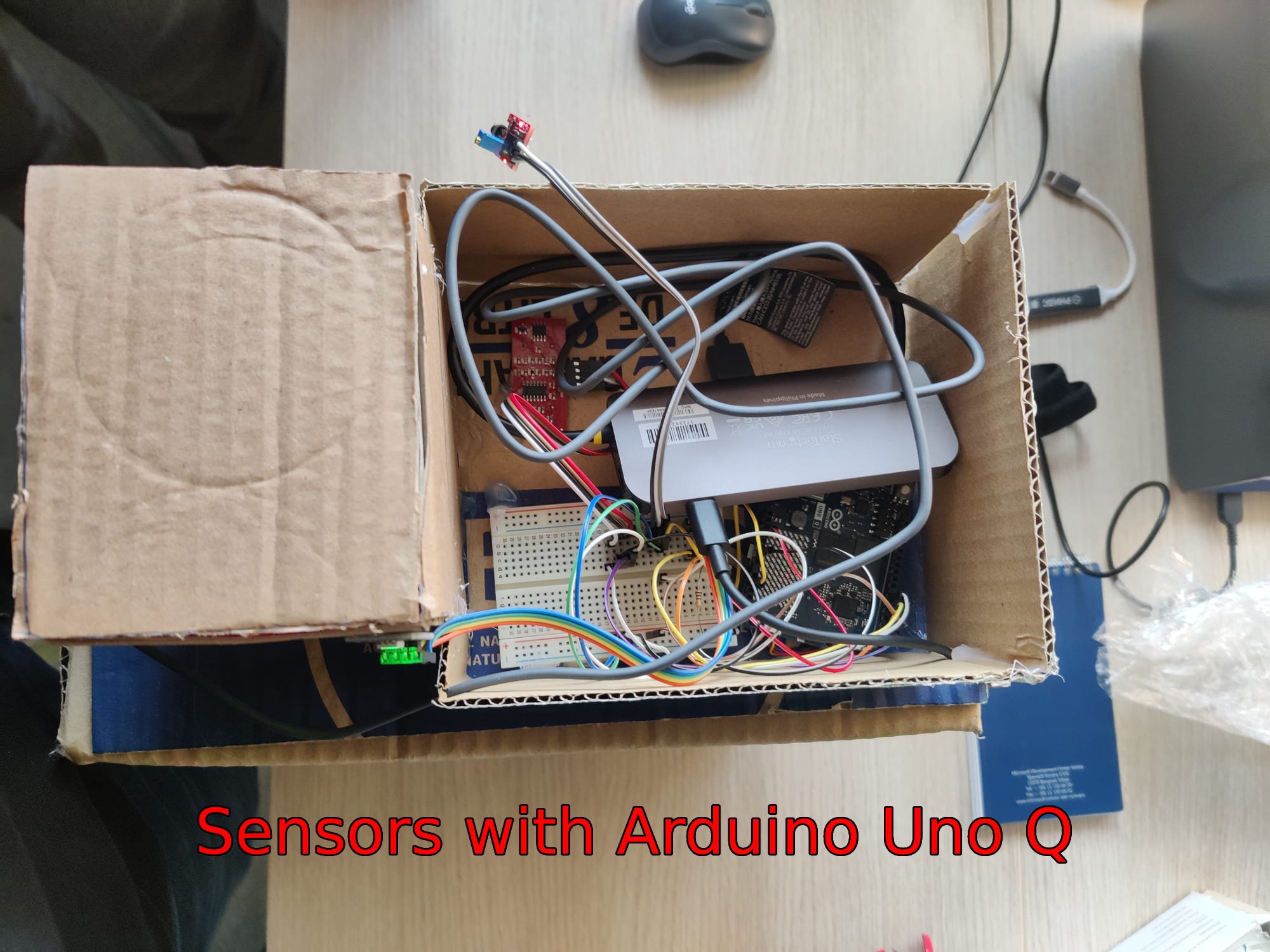
Hardware
-
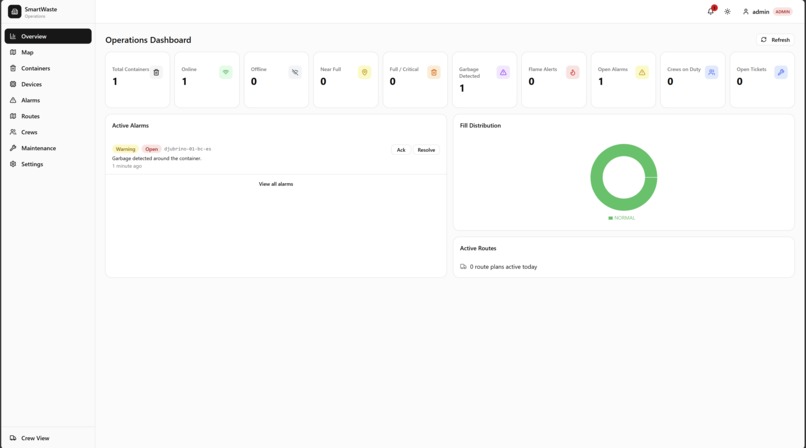
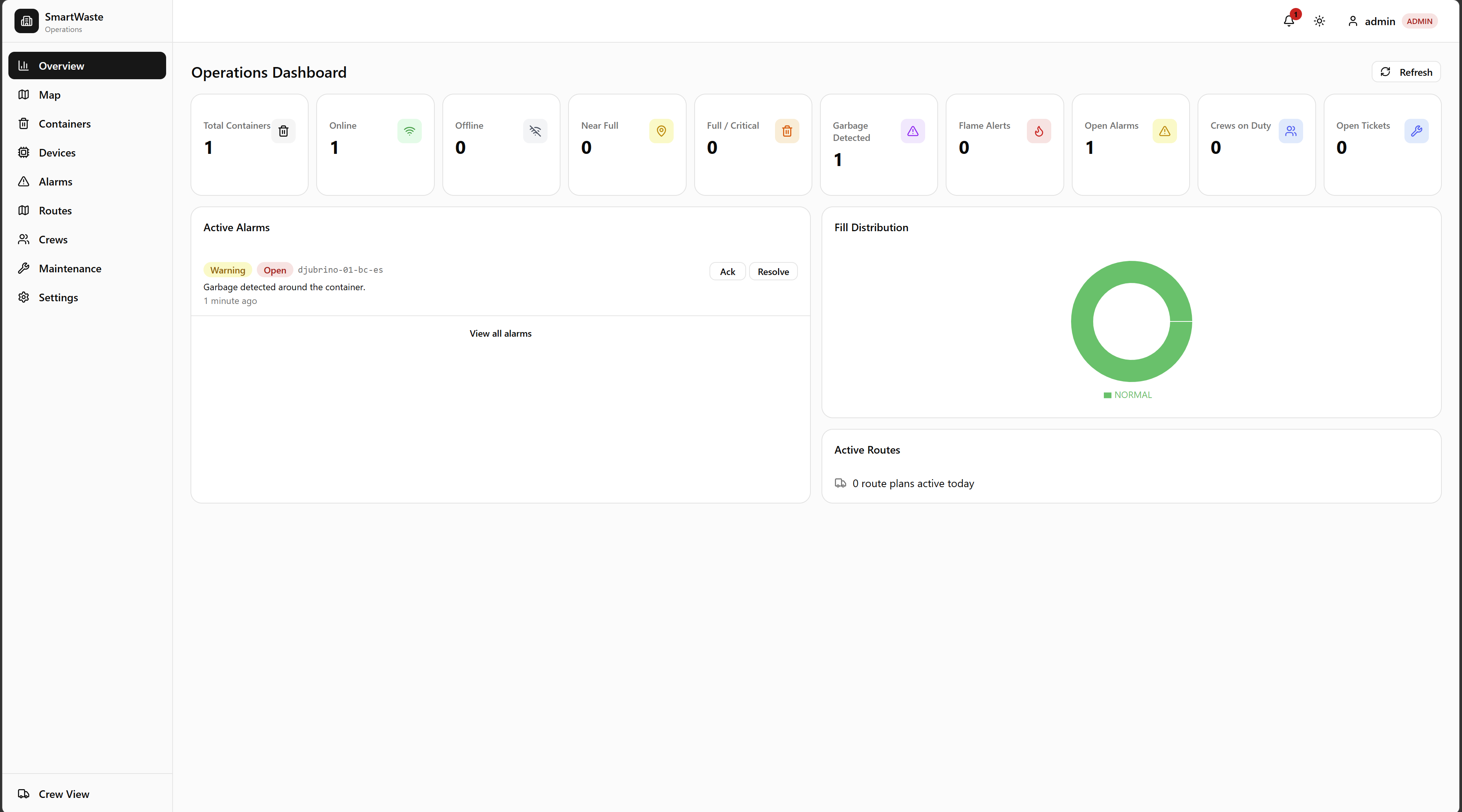
Dashboard overview
-

Event alarm view(with evidence)
-
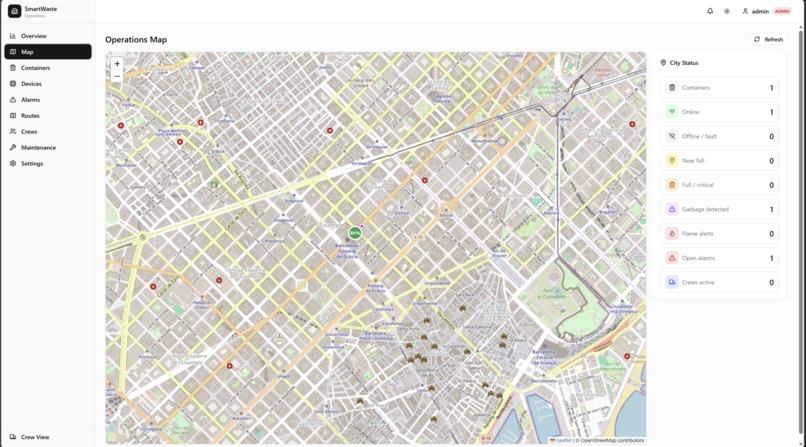
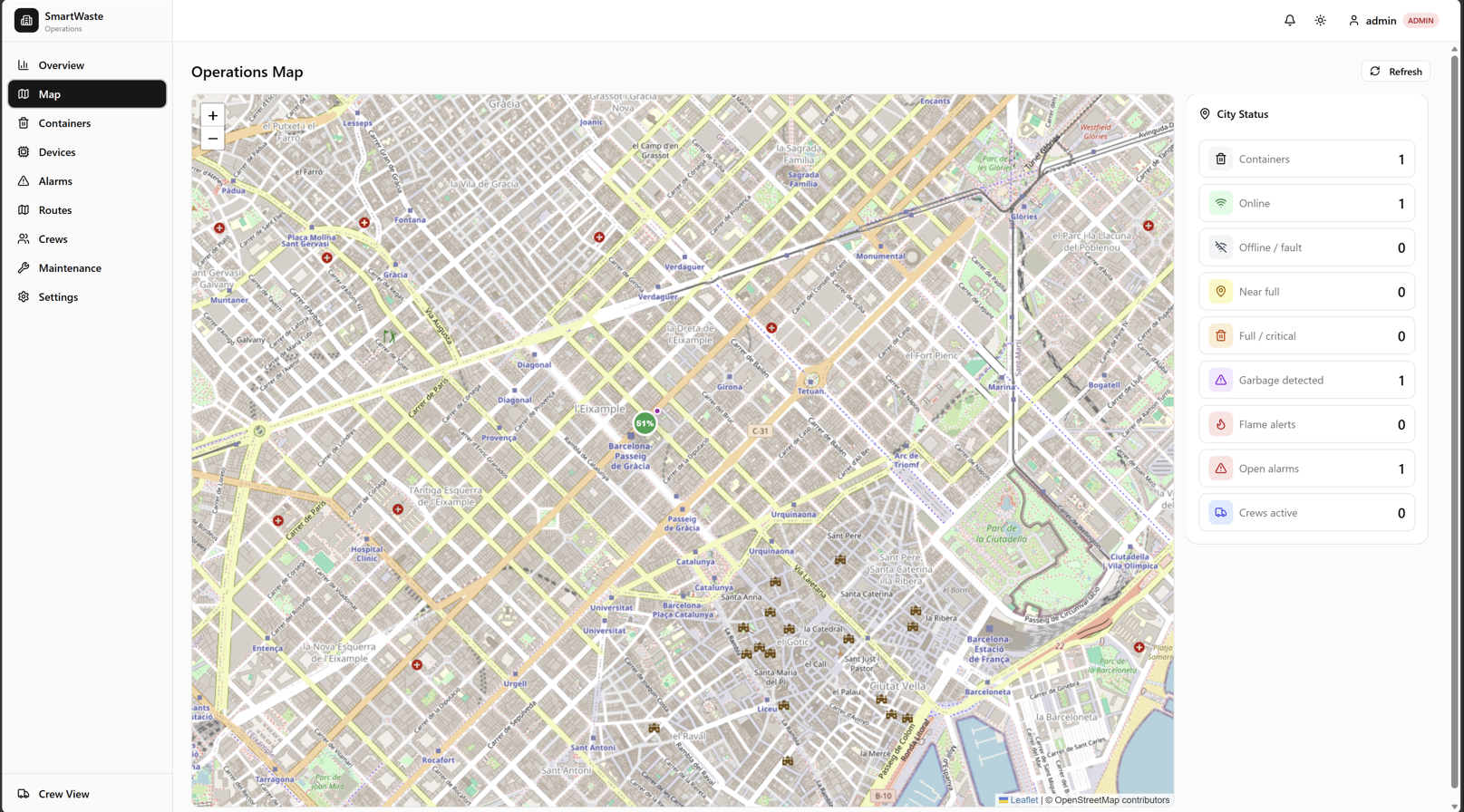
Map dashboard
-
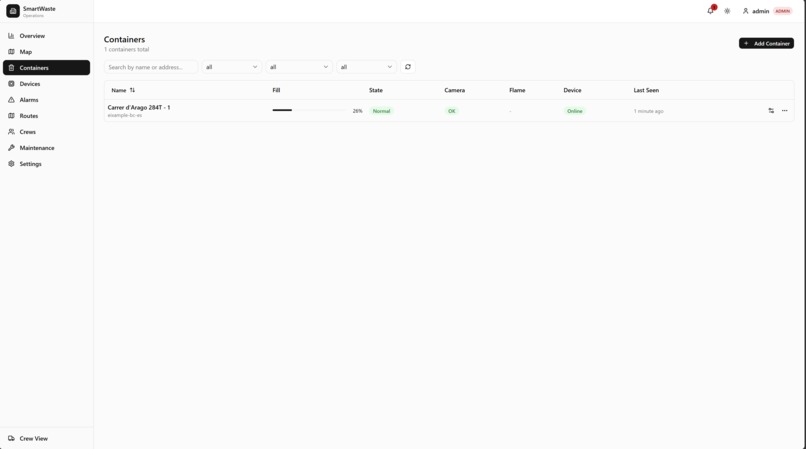
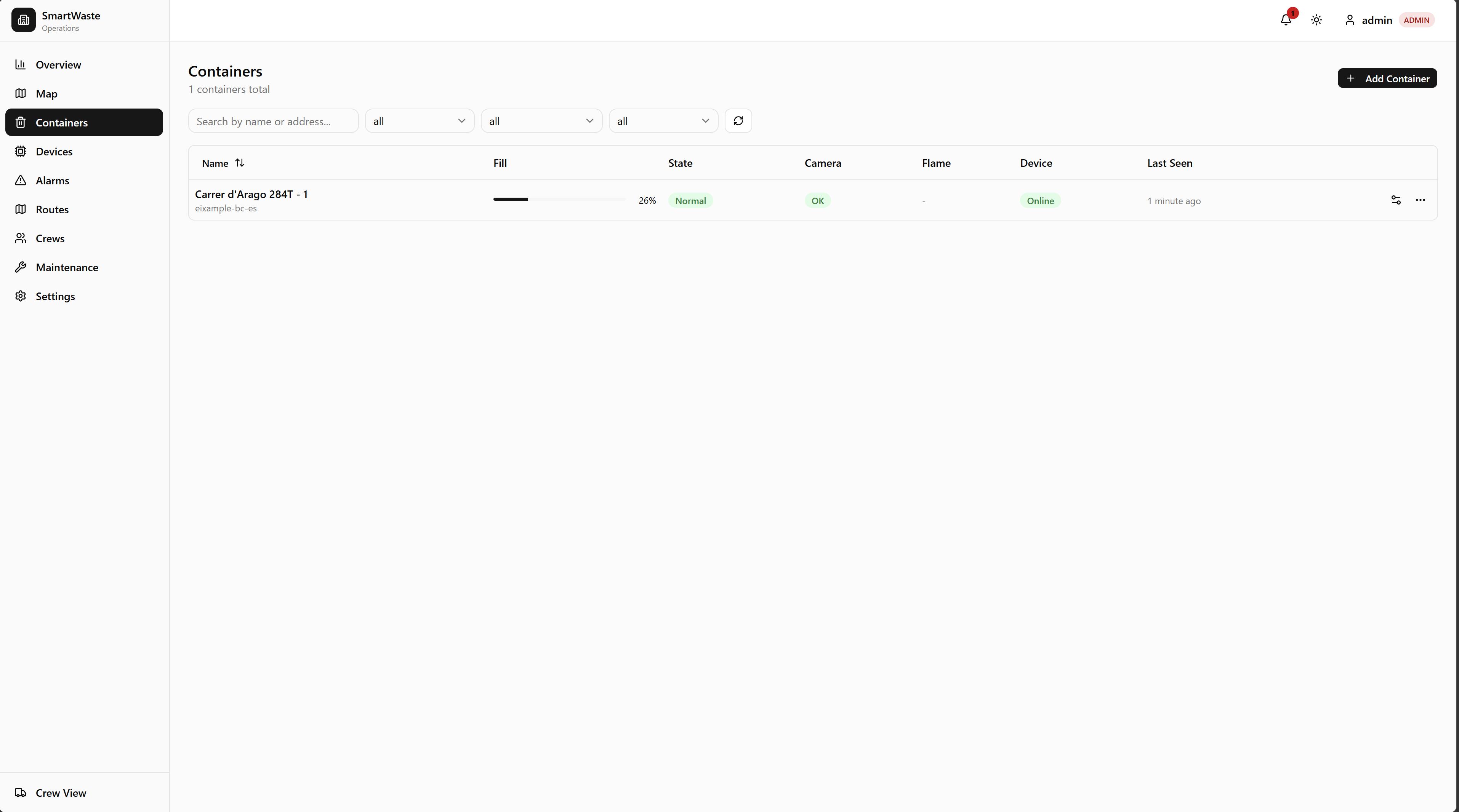
Containter table view
-
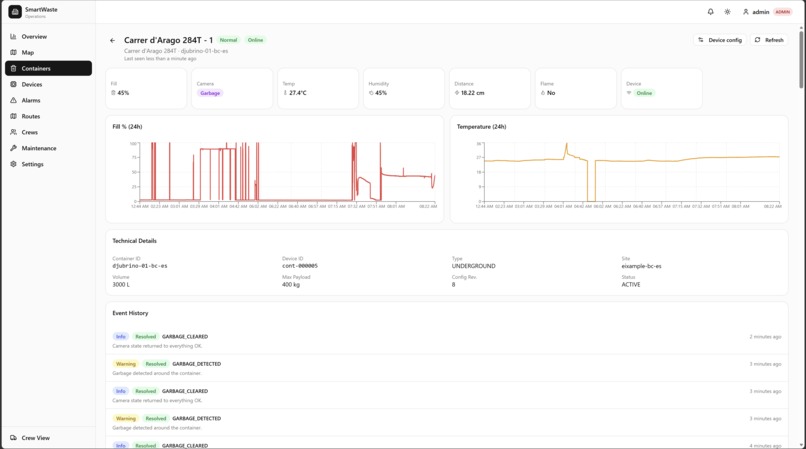
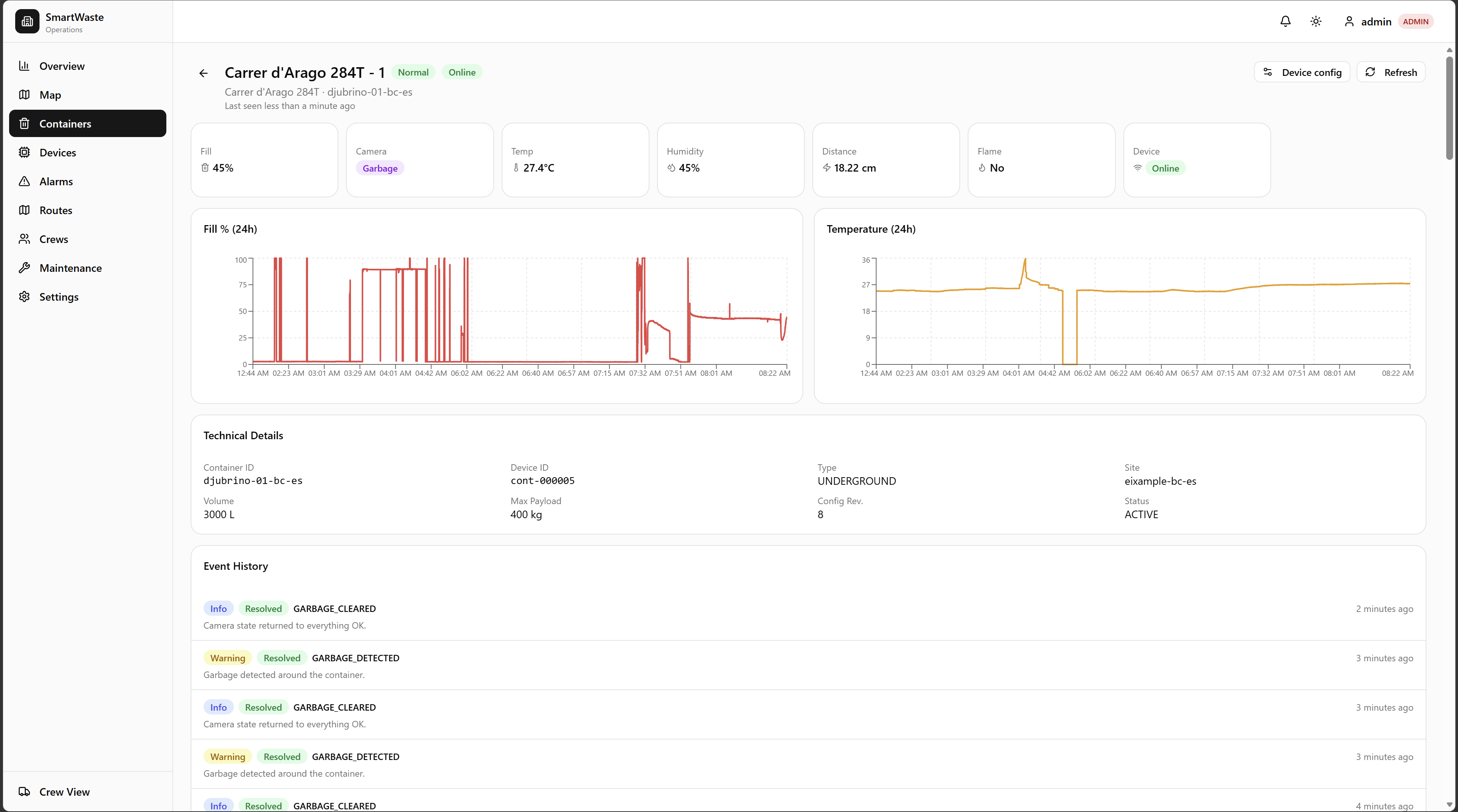
Container dashboard
-
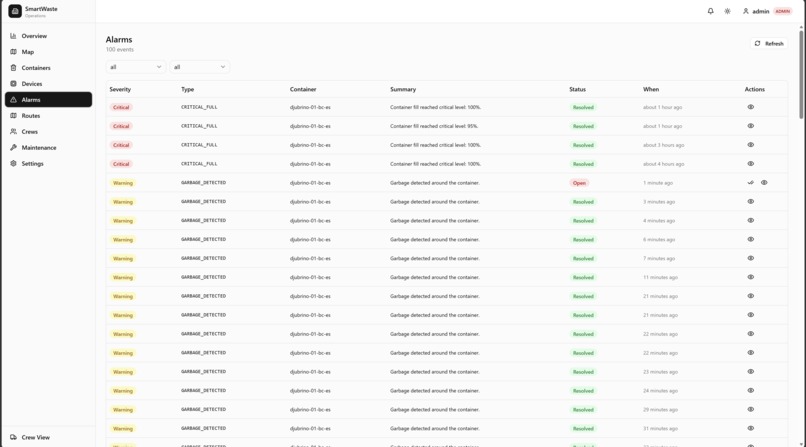
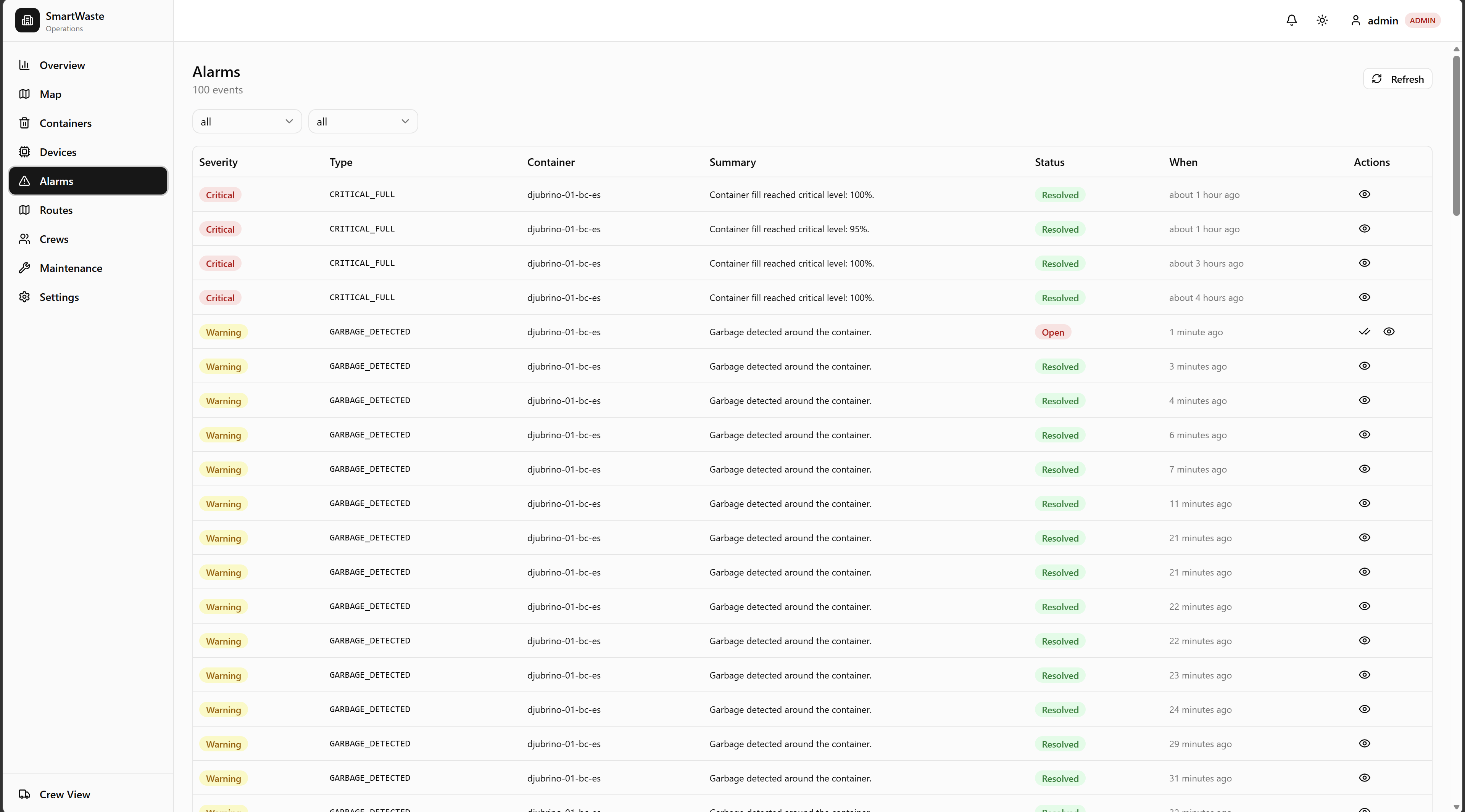
Alarms table view
-
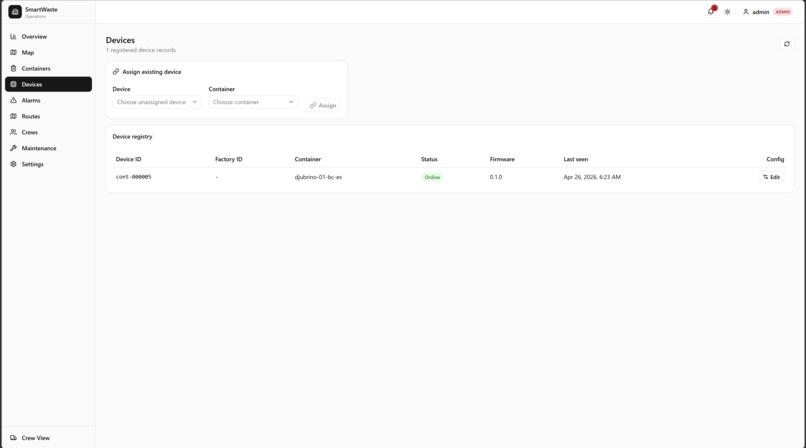
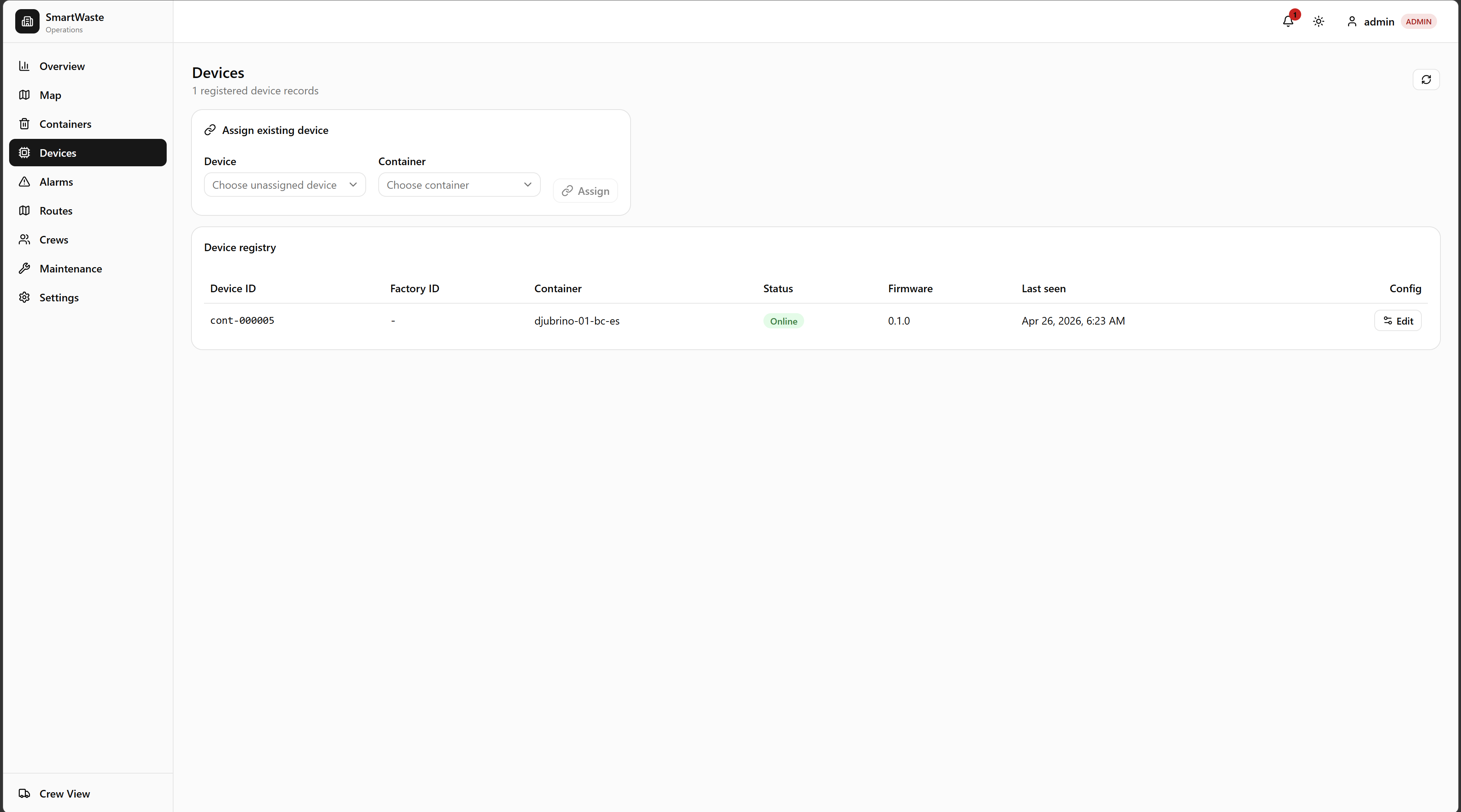
Devices table view
-
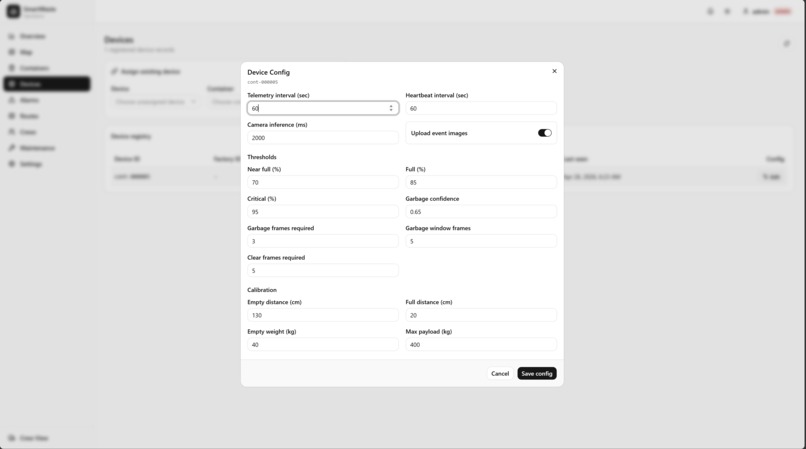
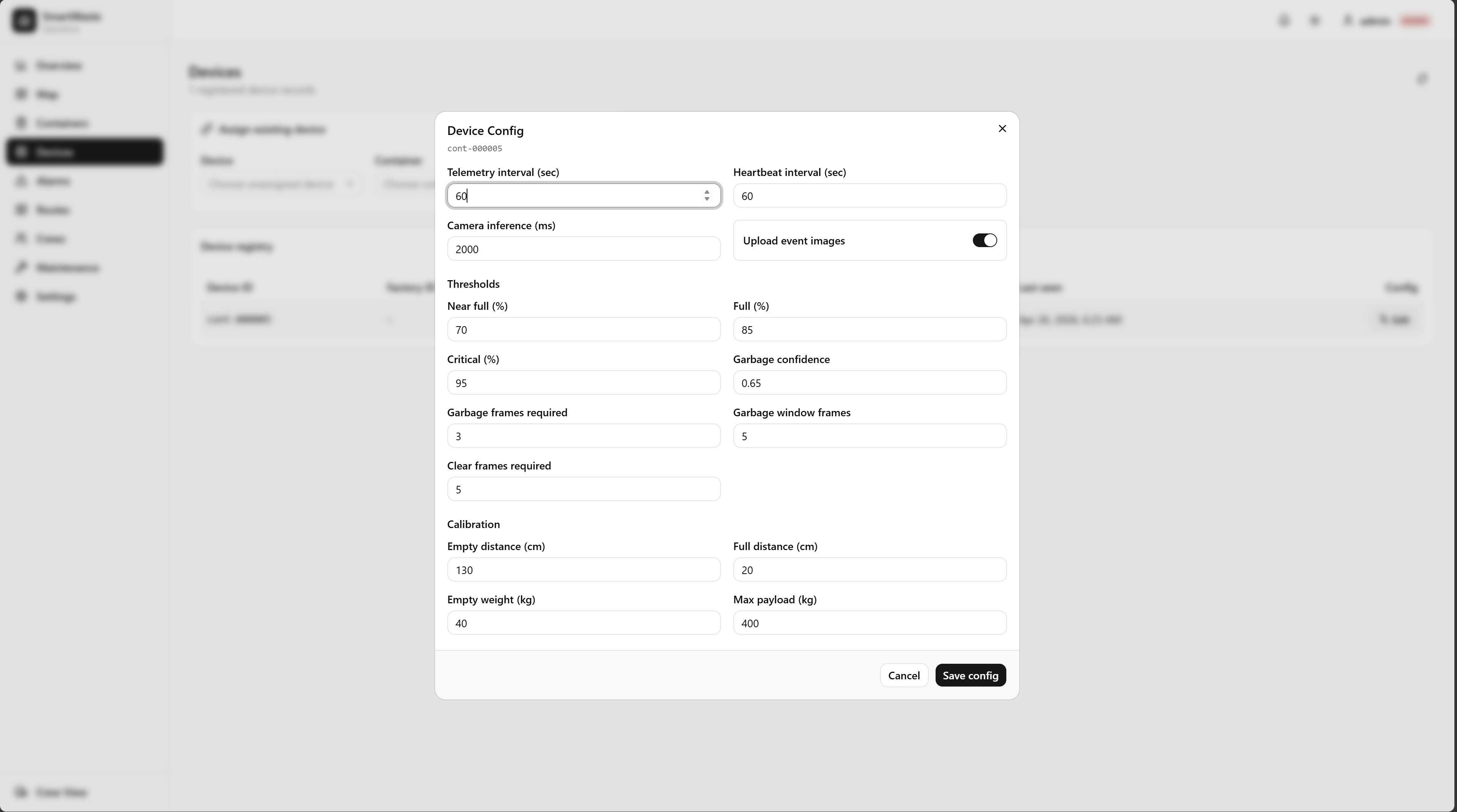
Device remote configuration panel
-
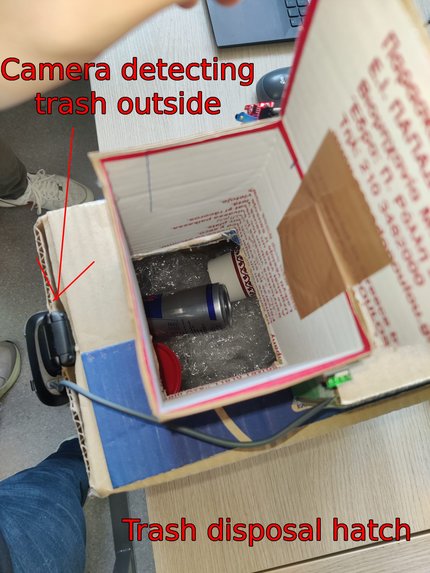
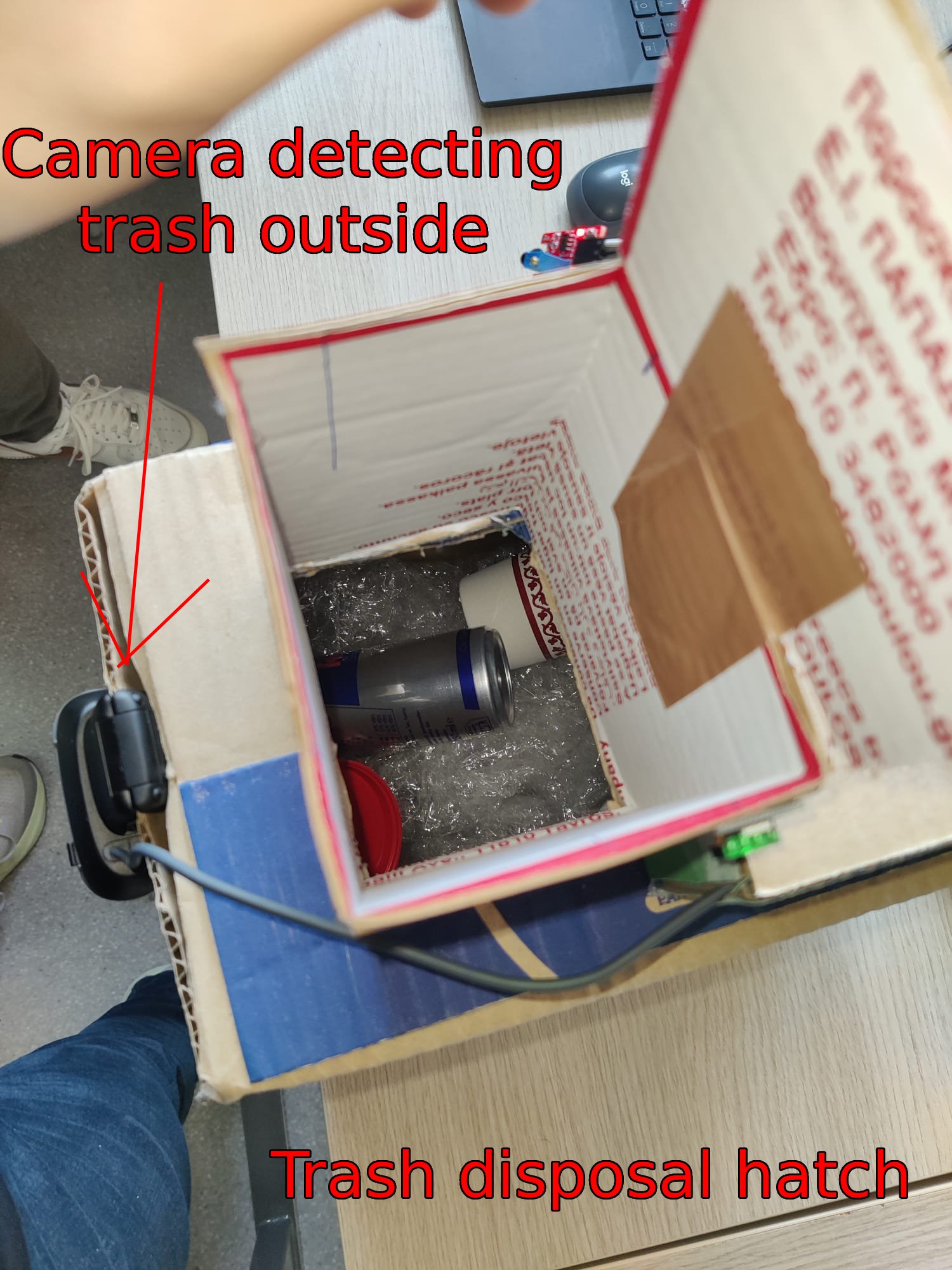
Inside of the container model

Inspiration
Our visit to the beautiful city of Barcelona was marred by the fact that a large number of containers in the city were full. This caused garbage to accumulate on the streets, polluting the city's greenery and creating unpleasant odours. Our idea was born with the goal of allowing everyone to enjoy the beauty of the city to its fullest potential.
What it does
We envisioned a system of smart underground containers powered by Edge AI placed throughout the city. Each container would include a device connected to a central server, monitoring key metrics and performing local inference. Relevant services could then track these metrics and events to be able to respond in a timely manner. Issues such as overflowing trash, garbage around containers, potential fires, or extremely unpleasant odours could be prevented or resolved quickly.
How we built it
Each smart container is based on the Arduino Uno Q platform. Its STM32 chip is responsible for reading data from connected sensors, while the Qualcomm processor handles communication with the central server. The backend server acts as an intermediary between all containers and maintenance personnel. It stores collected data in a MongoDB Atlas database and processes it to calculate and display useful insights on a UI dashboard. By using the Edge Impulse suite, we were able to train a model tailored to our needs in detecting trash that's around the container. An ultrasound distance sensor measures the level of the trash inside, fire detection sensor(WIP) can issue an early call to firefighters if the contents were to catch fire. Temperature and humidity sensors give valuable information on the putrescence of the surroundings, as temperature and humidity are directly correlated with bacterial growth inside the container.
Challenges we ran into
The biggest challenges we faced were training an effective model for detecting garbage on the ground and deploying it on constrained hardware. Additionally, establishing stable communication between the two chips on the Arduino board proved difficult. Messages were delayed or lost due to instability. We resolved this issue by downgrading the RTOS version on the board, which significantly improved reliability.
Accomplishments that we're proud of
We approached the problem holistically and developed a solution that covers multiple aspects of waste management. We successfully trained and integrated a custom AI model tailored to detecting waste around containers. We also built a full pipeline from embedded devices to backend infrastructure and a user-facing dashboard, which demonstrates the practicality of our system.
What we learned
We gained hands-on experience working with embedded systems, especially inter-chip communication and real-time constraints. We also learned how to optimise and deploy AI models on limited hardware, as well as how to design scalable backend systems using FastAPI and MongoDB. Most importantly, we learned how to integrate hardware, software, and AI into a cohesive, real-world solution.
What's next for Djubriño
In the future, we plan to improve the accuracy and efficiency of our AI models and further optimise them for edge deployment. We also want to enhance the routing system for garbage collection using optimisation algorithms (e.g., vehicle routing), enabling more efficient waste pickup. Additionally, we aim to scale the system to support more containers, integrate real-time alerts, and potentially collaborate with municipalities for real-world deployment.
Code
In the Try it out section, you can find our three repos, the embeddeed, backend and frontend code.


Log in or sign up for Devpost to join the conversation.