-
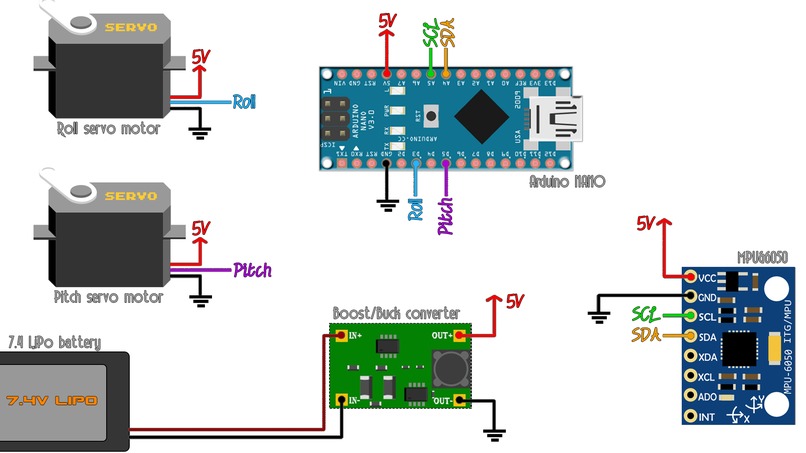
Circuit Diagram
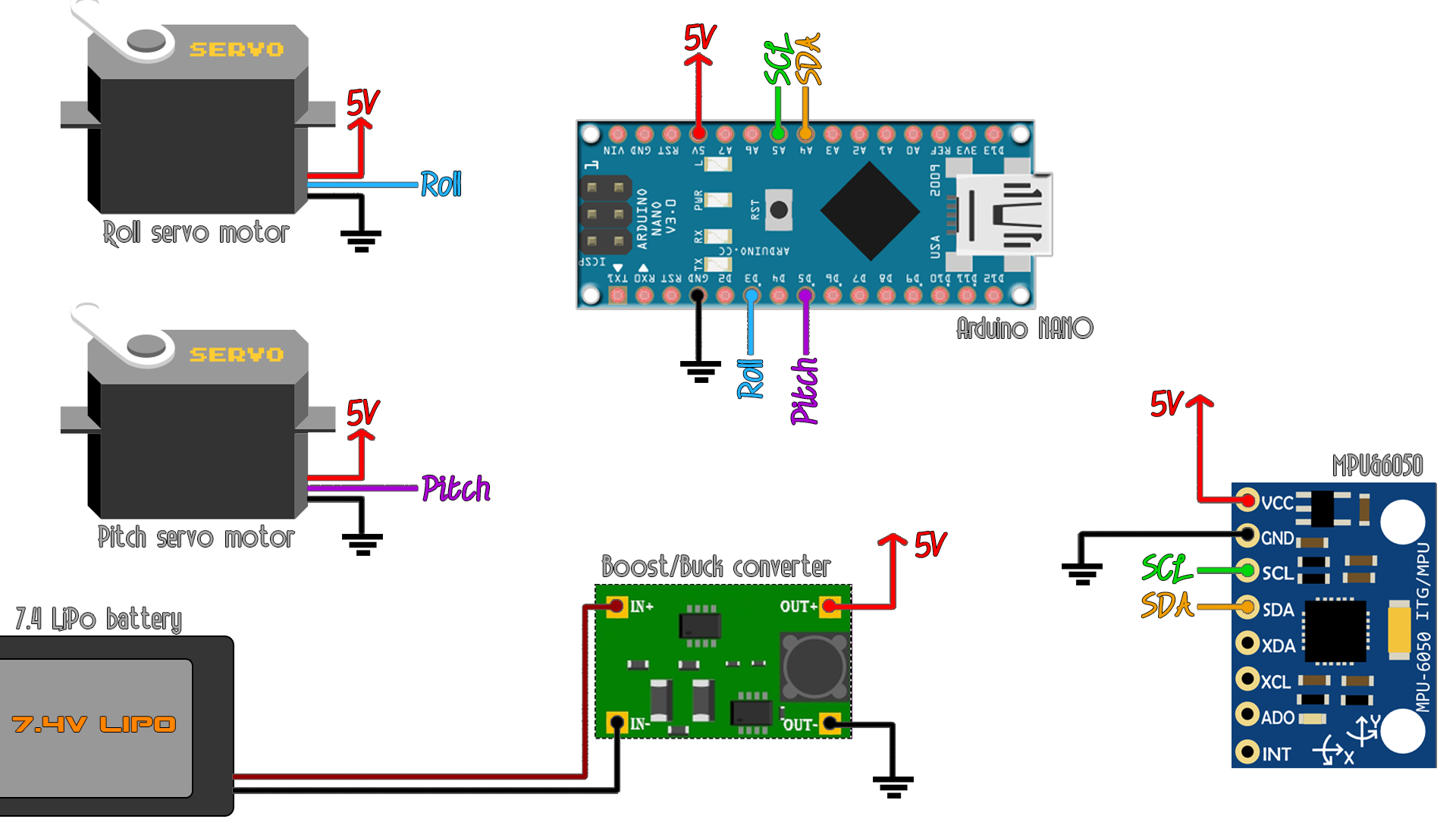
DIY Gimbal
This project consists of 3 MG996R servo motors for the 3-axis control, and a base on which the MPU6050 sensor and the battery will be placed.
Components used in this project
All other resorces are available on my github.
Features
- This gimbal help to stablize the phone/camera in a fixed position to capture a better quality videos.
- This gimbal consist of 3 servo motors that helps it to work on all 3 axis (x, y, z).
- This gimbal is cheaper.
Faced Difficulty
I faced lot more difficulties with the circuit as i am new to hardware, i made 5 times mistake in wiring another difficulty was to write the algorithm in C++ as i am in learning stages of C++.
Learning
I learnt lot more things during this hackathon project like how to solve circuit problems, how to use MPU6050 and how to code algorithms in C++.
Thought
I got this thought watching young youth as they all want to be youtuber or tiktoker, so it will help them to record the videos very smoothly without disturbance within a cheap cost.
Not Maintained after
It will not be so maintained after 10th Feb 2021. It will be again available after 4-5 months till then the repo will get privated.
What's Next
I will improve its circuit diagram and explaination as much as i can.
Make sure to hit a like 👍 to this project if you liked it.
Built With
- arduino
- cpp
- diy


Log in or sign up for Devpost to join the conversation.