-

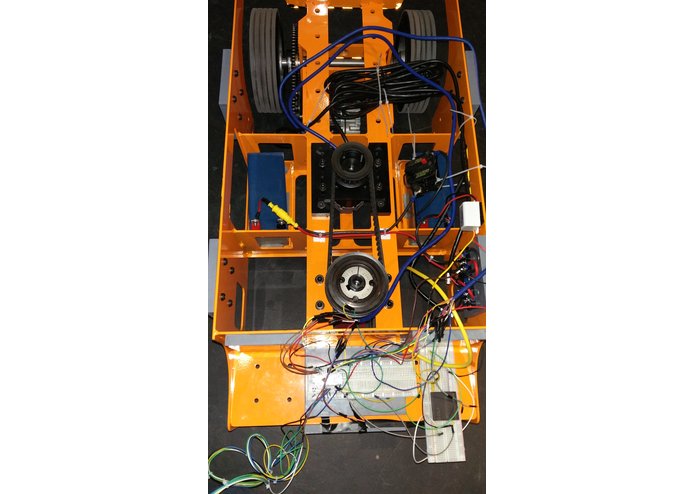
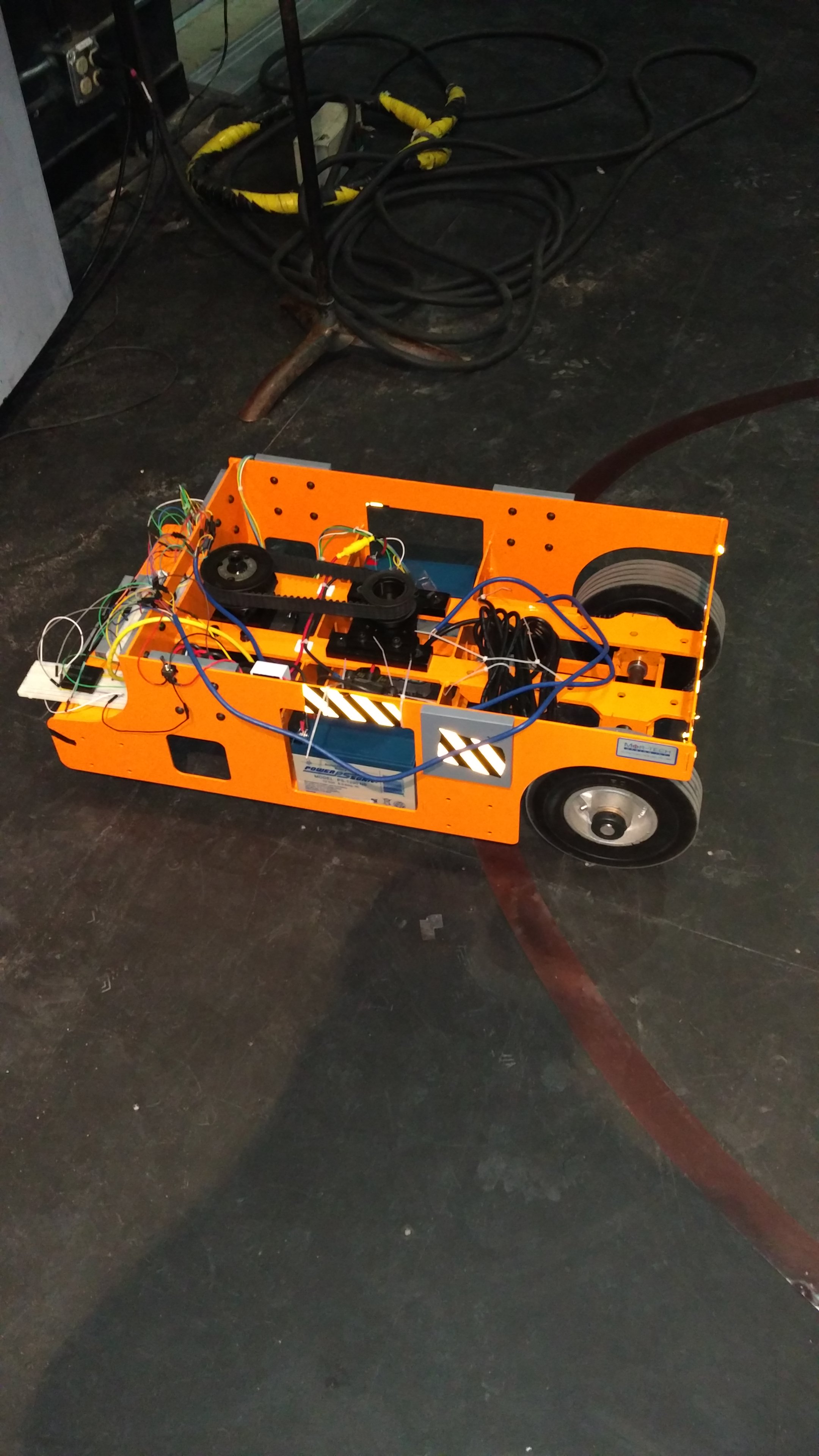
left side
-
back
-

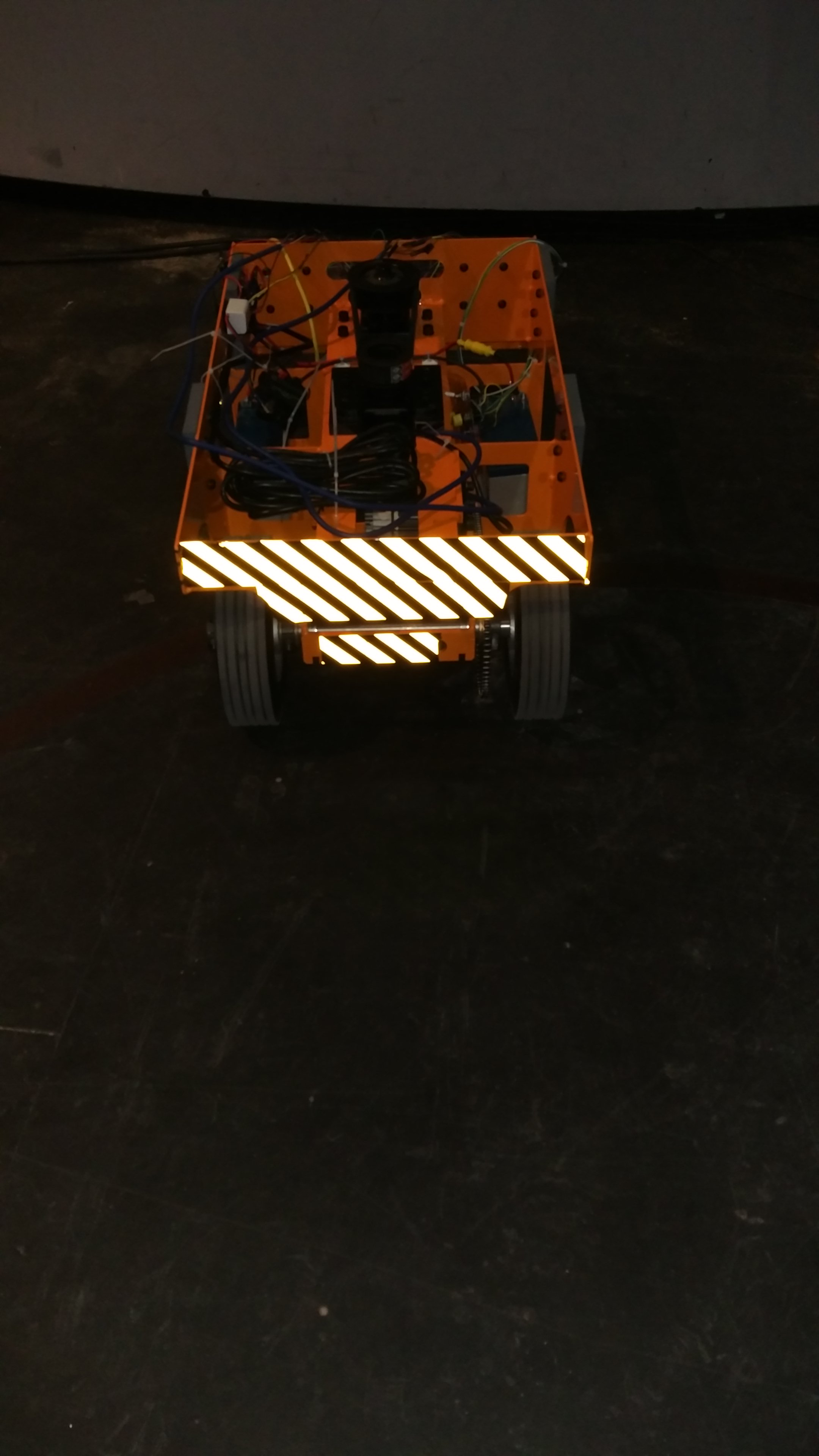
front
-
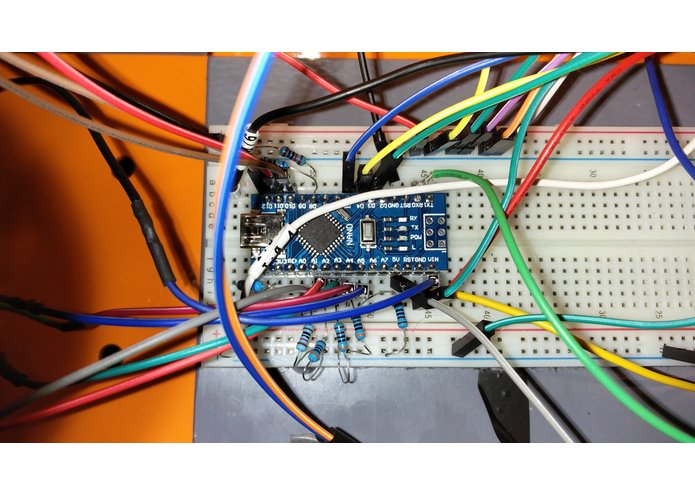
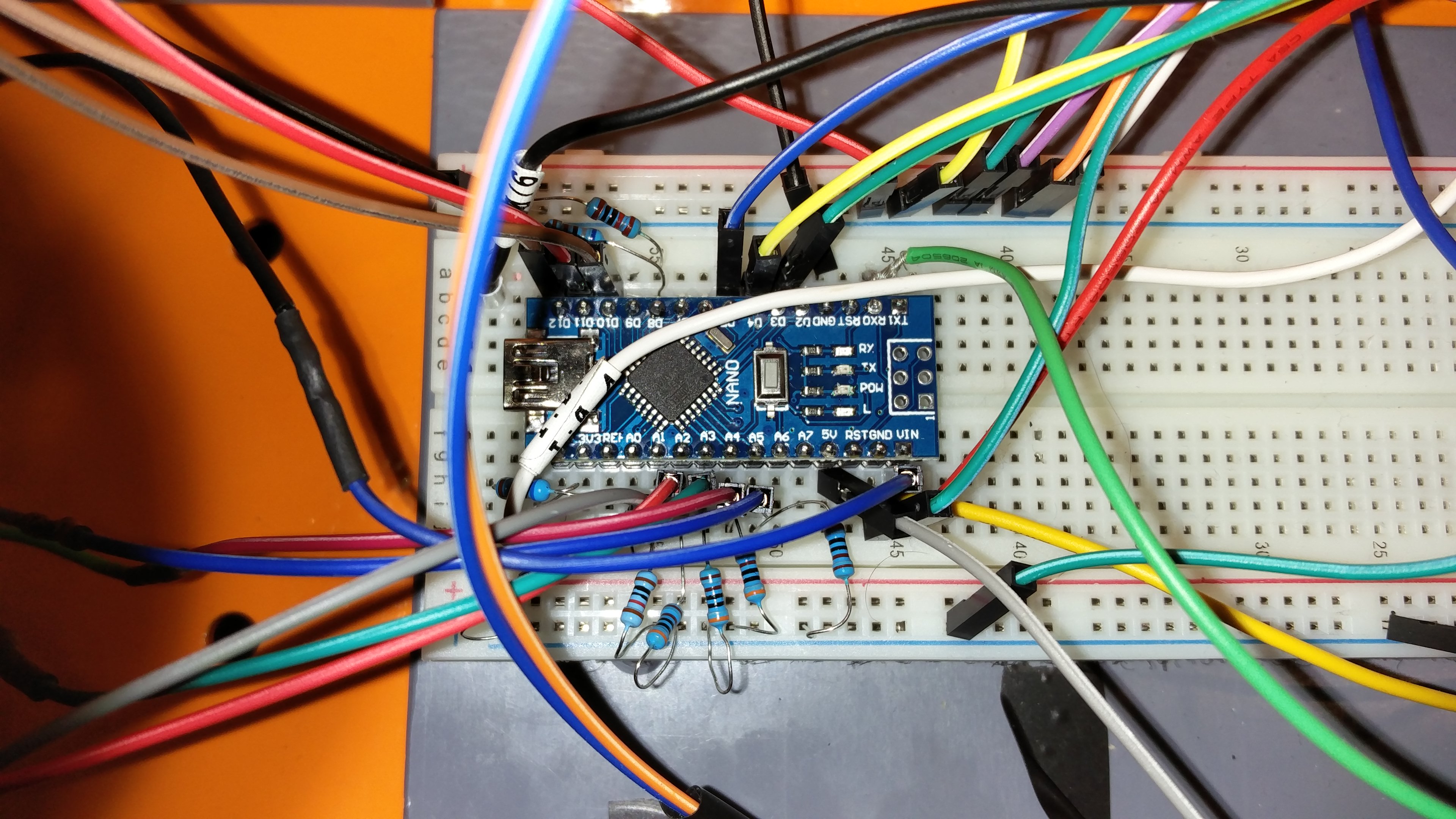
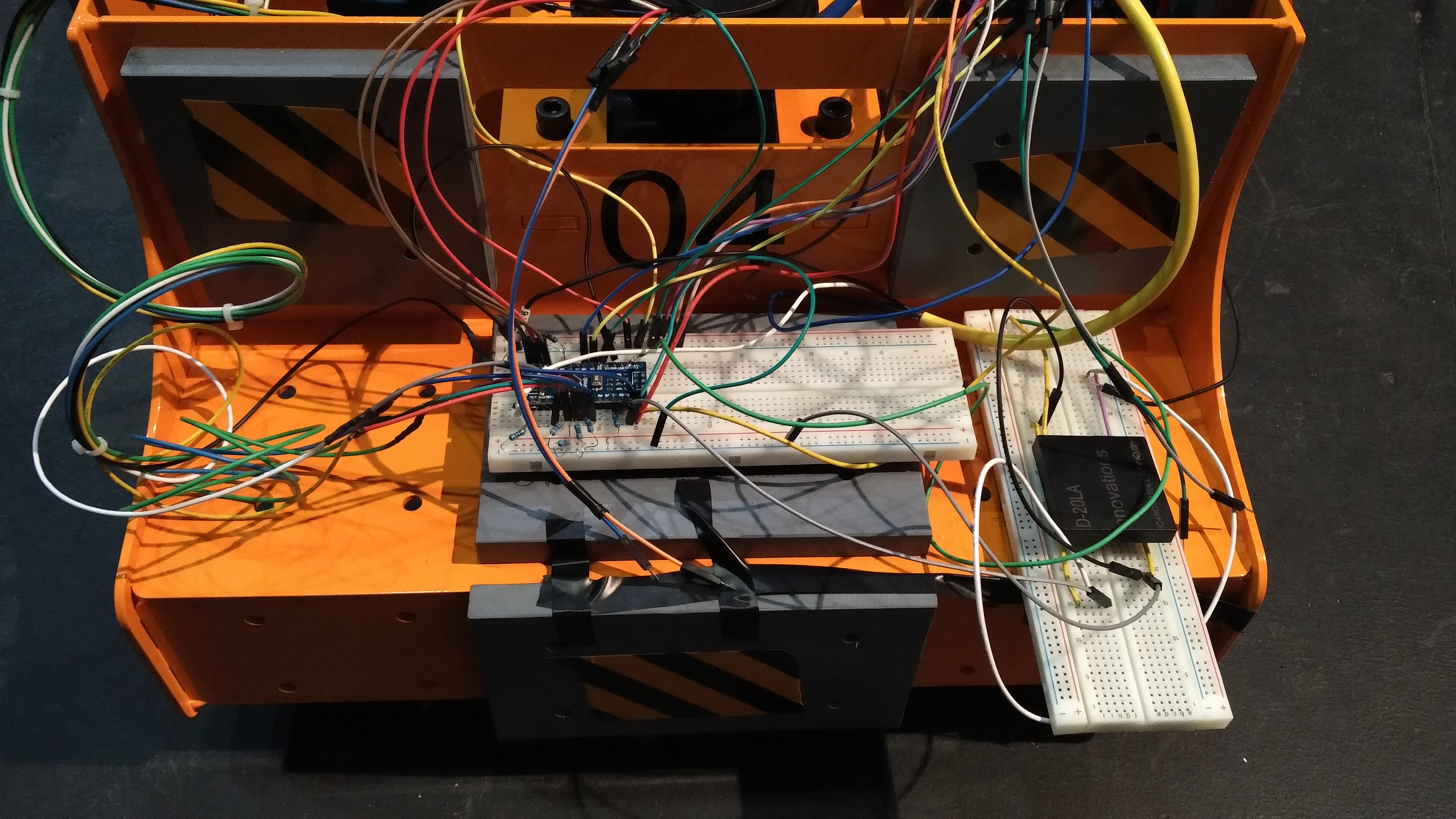
arduino nano hookup
-
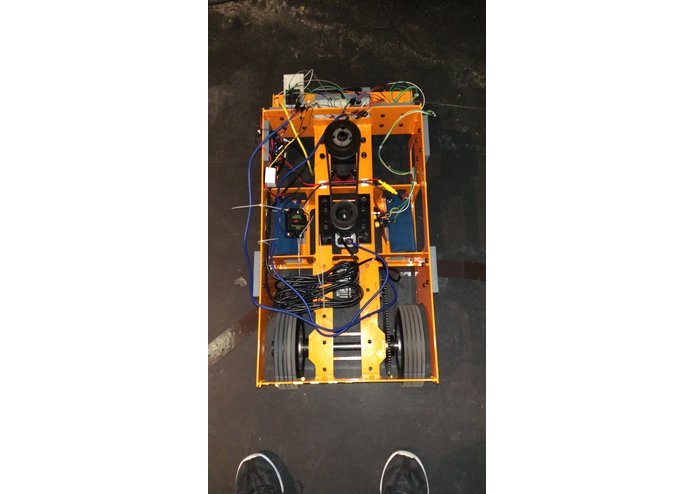
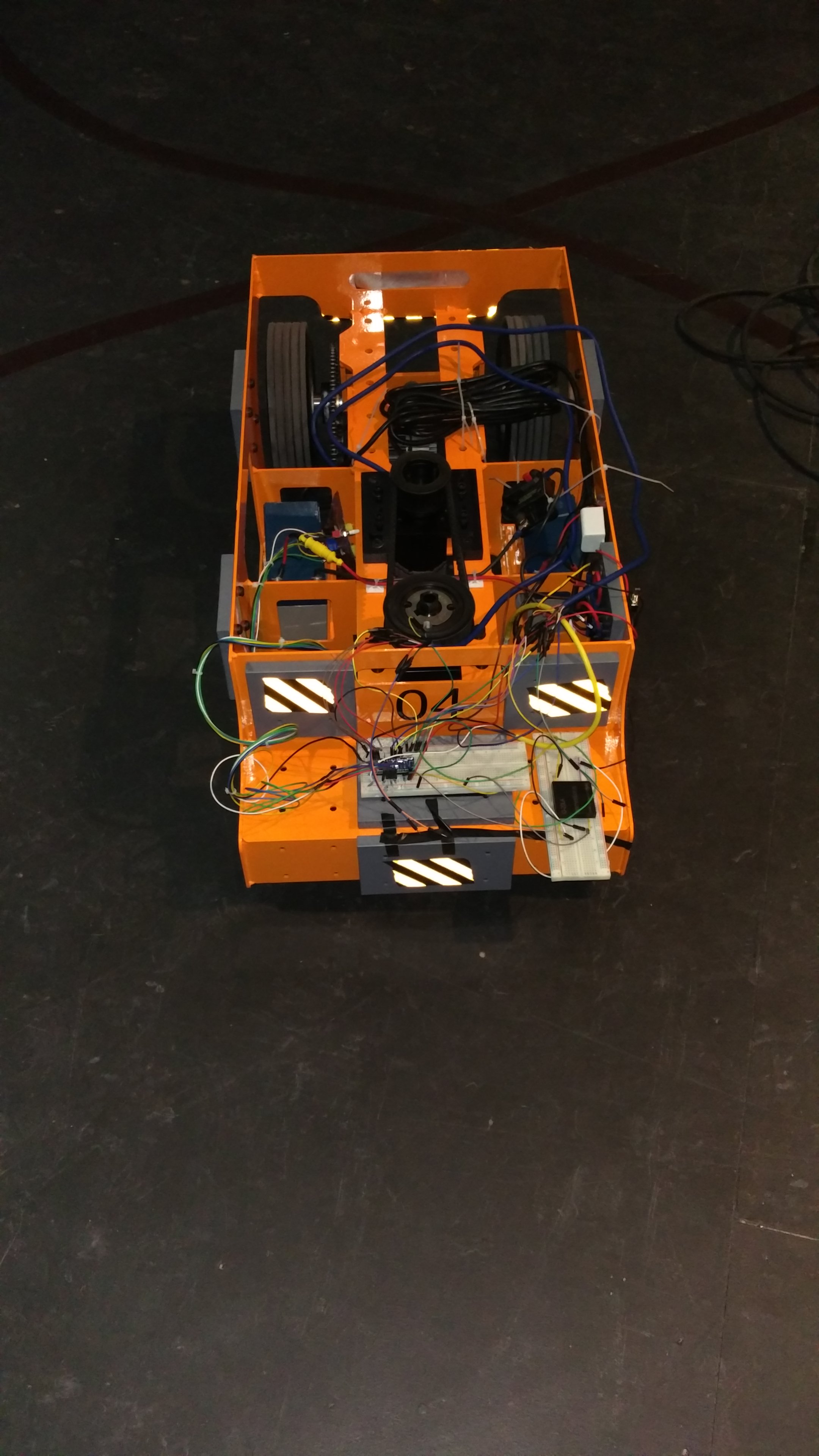
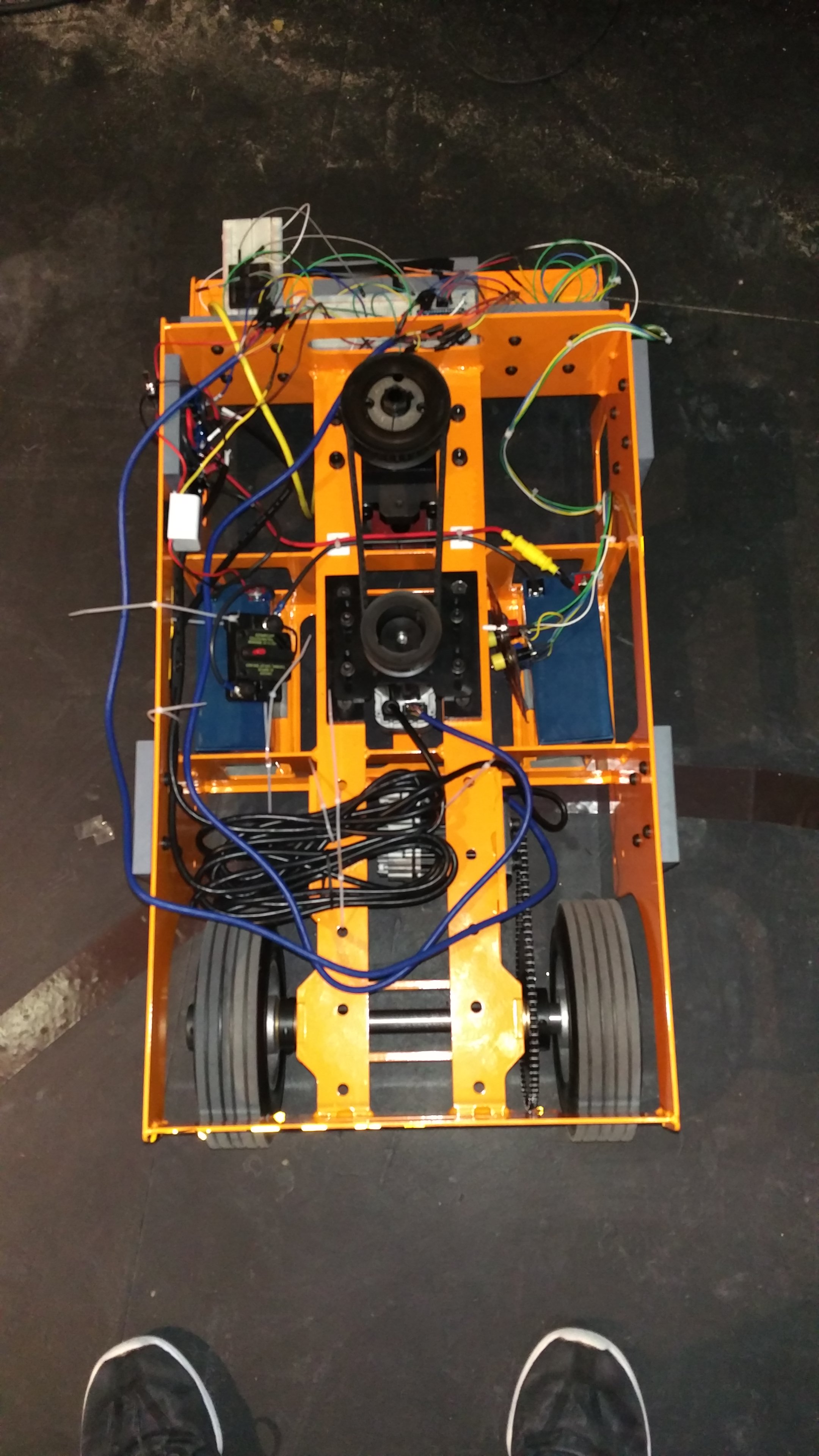
top view
-
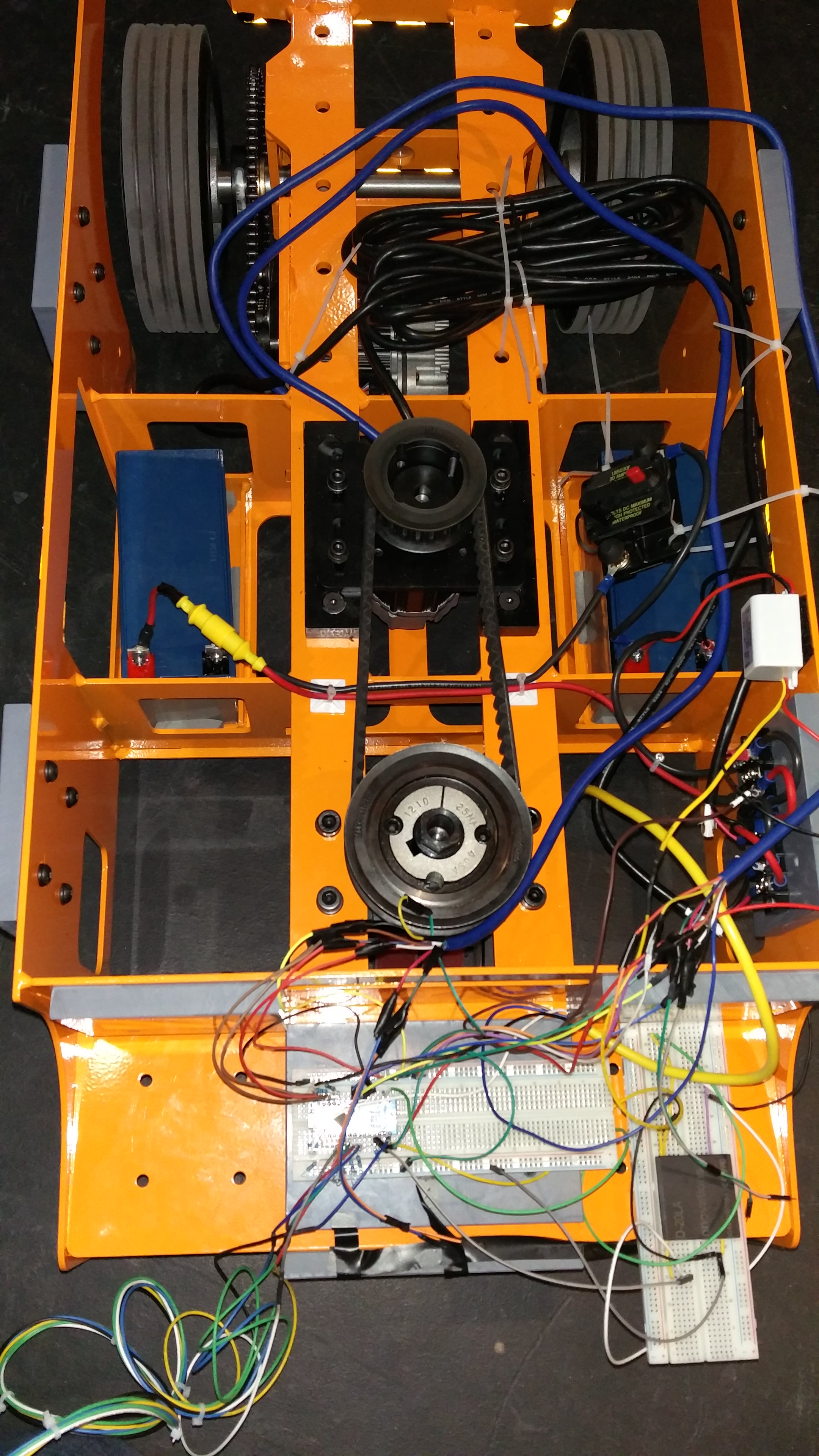
front overhead
-

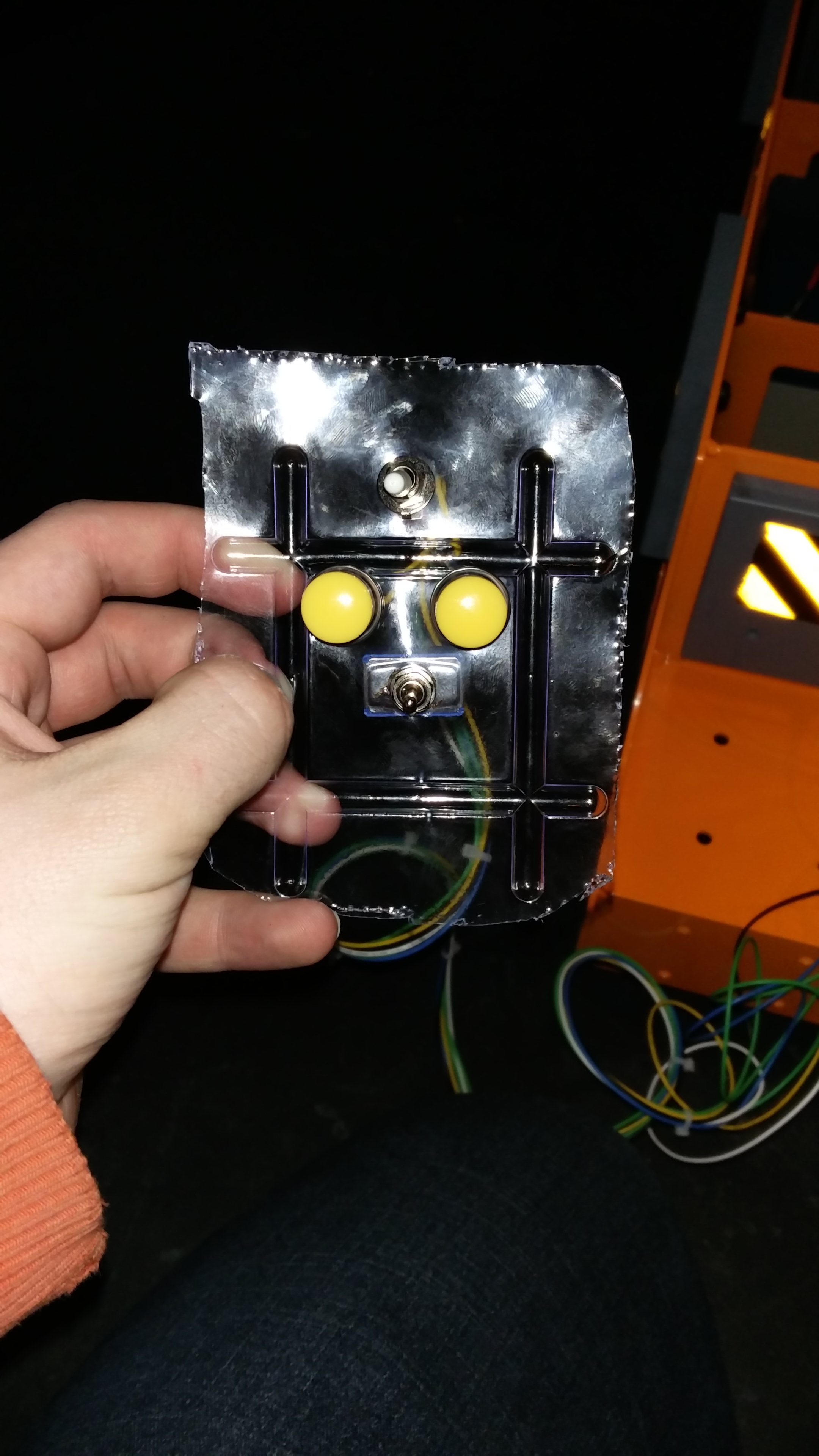
custom controller
-
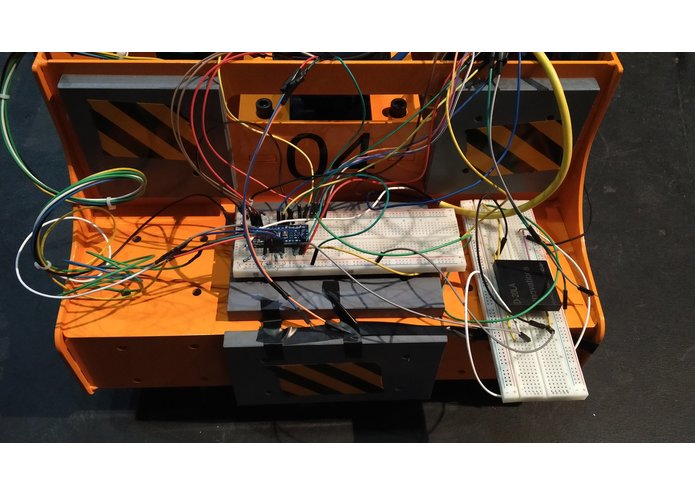
breadboard hookup
Inspiration
We came to Winter Wonderhack originally intending to build a program to draw fractals, however upon arrival we say the frames to what we didn't know was an AGC, automated guided cart. After finding out that all it had to do was follow a line (a seemingly simple task that turned out to be much more difficult than expected) we were hooked and psyched to give it a shot.
What it does
The AGC has a sensor on the underside of the front end to detect a magnetic strip on the ground. To follow it, the front steering motor attempts to track the center of the strip by oscillated very quickly back and forth. This is all driven by a rear motor connected to one drive wheel from the pair. We have implemented an RFID reader to read inputs to slow down, speed up and make an immediate stop.
How we built it
Using an arduino nano, we manage digital inputs from 2 motors, an RFID reader, a magnetic sensor and custom controller. The motors both have 3 inputs, enable, A and B. On the front steering motor A and B control the direction while the speed is specified beforehand using software. The rear drive motor has A mapped to a direction and B mapped to its speed, in this case B is read and written as analog. The RFID reader was wired in and read as serial input to display the RFID number of RFID chips. Using a card writer we wrote inputs to 3 of these chips to read a specific number to map input.
Challenges we ran into
The original rear motor in the AGC was an SC motor that we could not easily program to interface with our nano. This was not something neither we nor Mor-tech had planned for. Also doing the pin out for the RFID reader caused some headache as to why we couldn't read in the values of the chips properly, we had to have someone point out our mistake and give us the correct pin placement.
Accomplishments that we're proud of
We got the AGC to run all the way around the track without much trouble. Also the fact that, knowing nothing about working with arduino coming in, we can make everything work and interact with a little bit of help.
What we learned
Over the course of the hackathon we have learned how to interface with some arduino devices over serial and fully connect up a motor circuit. It has also taught us a great deal of time management and division of labor amongst people based on skill sets.
What's next for DIY AGC build w/ arduino
The things we would add if possible would be to add an ultrasound sensor to allow for stopping when people walk in front of it.

Log in or sign up for Devpost to join the conversation.