-
-

-
DisasterLink web app home
-
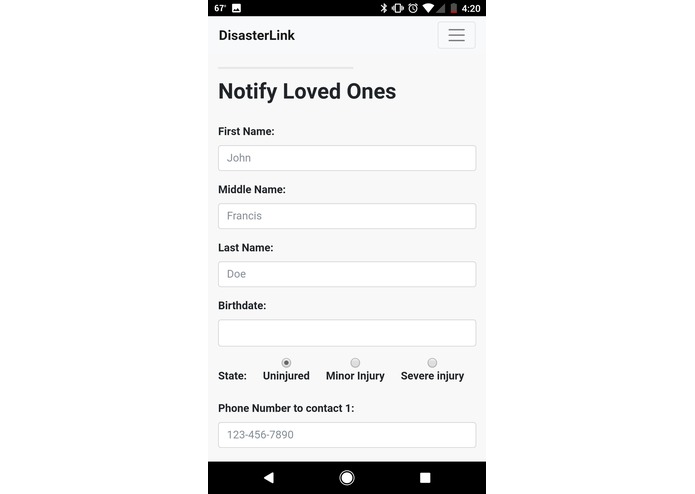
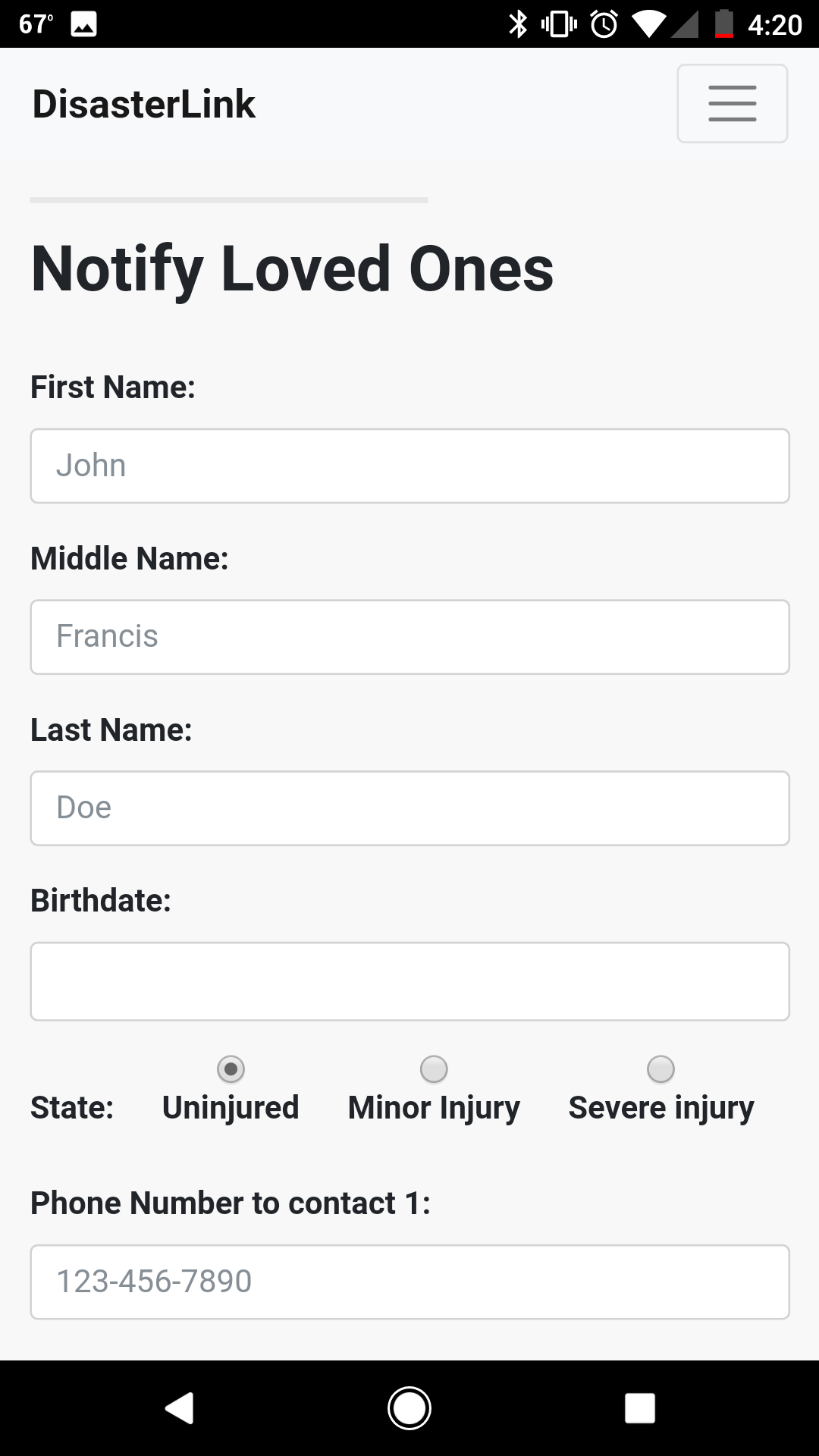
DisasterLink form
-
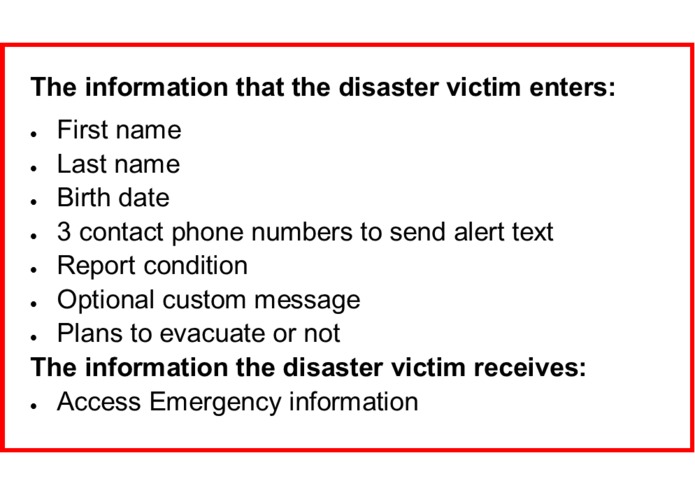
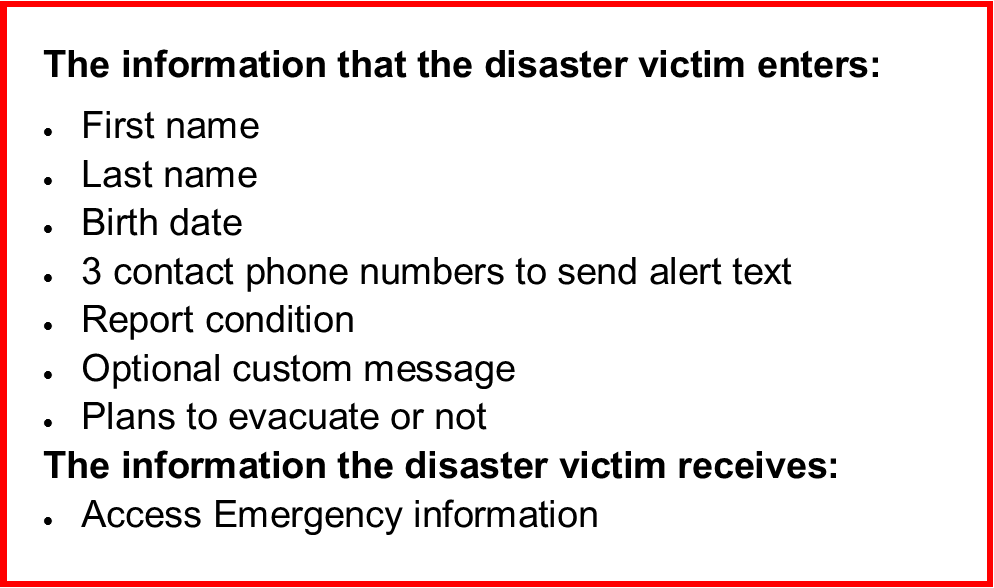
Information collected by DisasterLink

Inspiration
Hurricanes Harvey and Irma caused catastrophic damage, and Puerto Rico still remains largely without power and critical resources. Many US citizens are without homes and are struggling to subsist in the wake of these disasters, causing suffering, loss of life, and damage to our economy. We wanted to find a way to use new technology in a novel way to aid disaster recovery efforts. UAVs provide a way to gather information and provide access to disaster victims in an environment that may be without reliable access to power or communication networks.
We wanted to find a way to use new technology in a novel way to aid disaster recovery efforts. Unmanned Aerial Vehicles (UAVs) provide a way to gather information and provide access to disaster victims in an environment that may be without reliable access to power or communication networks.
What it does
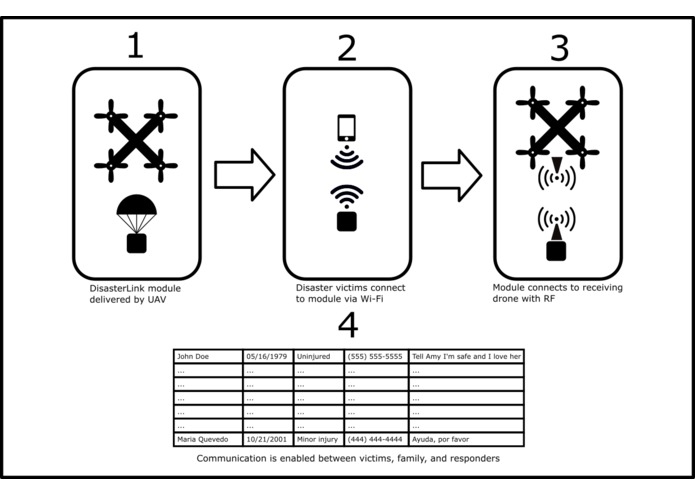
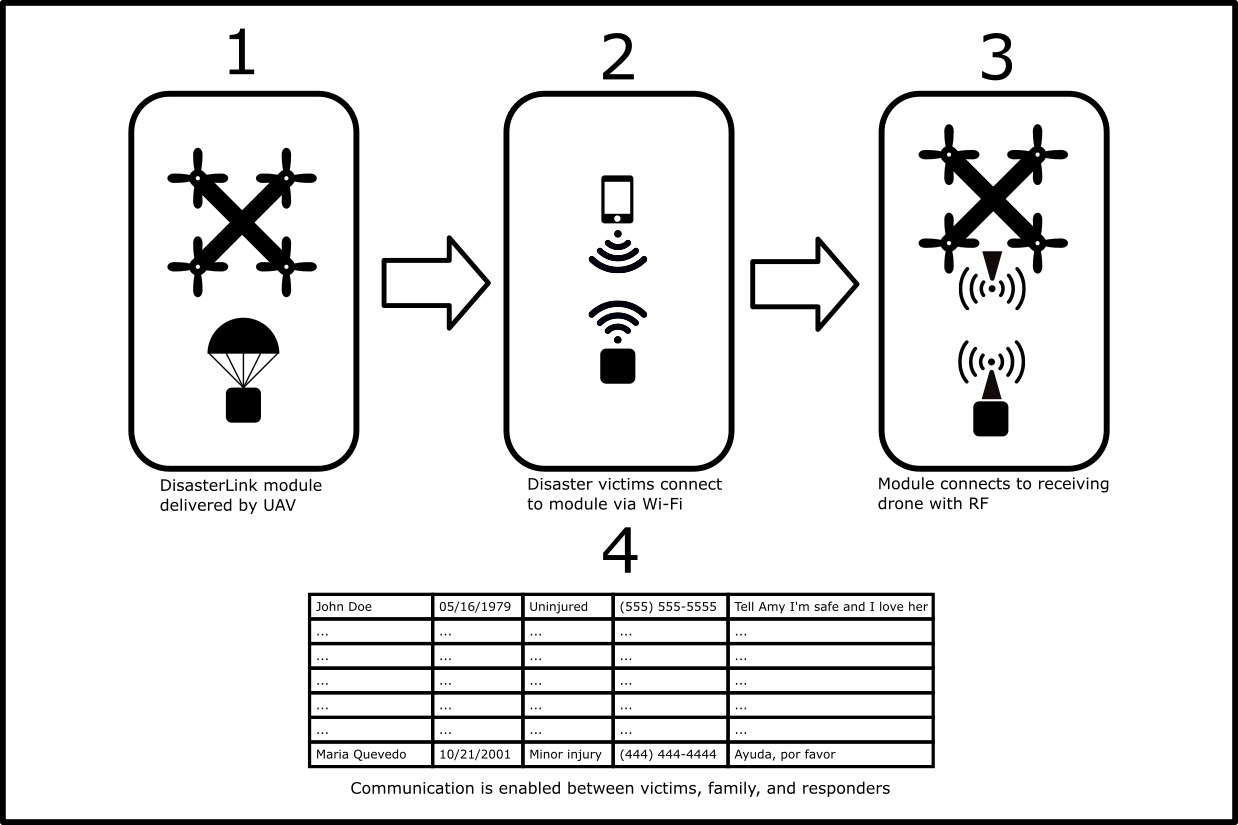
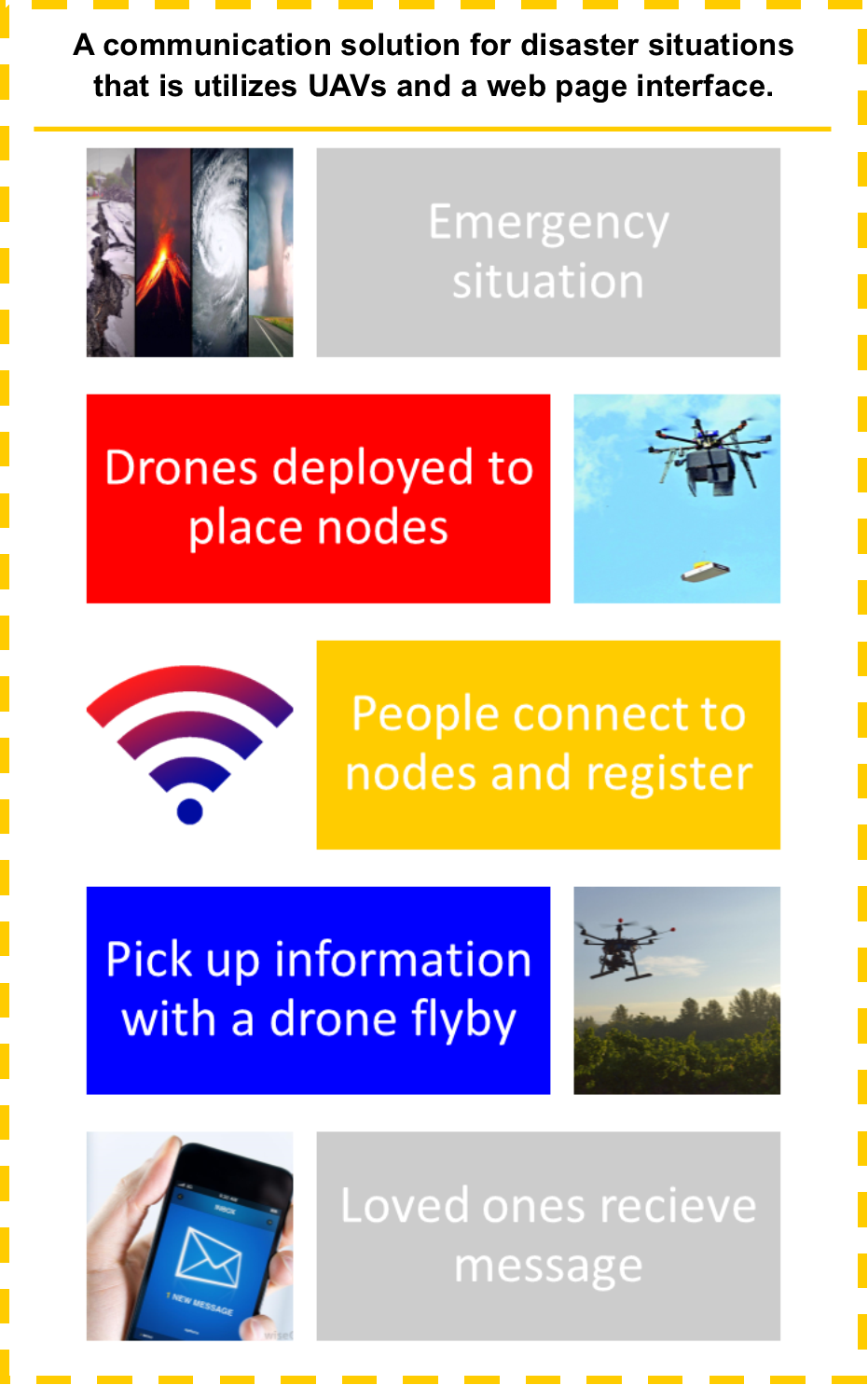
DisasterLink is a check-in service for disaster situations that uses UAVs to collect and transmit information in areas that are otherwise without power or functional communication networks. 1) Drones drop mobile DisasterLink modules in disaster-stricken areas. 2) Nearby disaster survivors then check in and register information with these modules. 3) The transmit the information at long range to data collection drones. 4)The check-in data is stored and will help disaster relief efforts by verifying the name, location, and injury status of survivors, which may not otherwise be possible without power.
DisasterLink is a communication service that can be initiated in disaster situations. UAVs drop small capsules, called nodes, in strategic locations. It will help disaster relief efforts by verifying the name, location, and injury status of survivors, which may not otherwise be possible without power. These nodes are used to collect and transmit emergency information in areas that are otherwise without power or functional communication networks. Nearby disaster survivors are able to connect to the node’s WiFi to check in and register information on their condition. Data collection drones flyby and collect the information that the nodes transmit to them at long range. That drone then send the requested text messages, as well as submit the information to a server that loved ones are able to access.
How we built it
We built a working prototype of a DisasterLink module delivery drone. The module internals were built around a Raspberry-Pi Zero-w powered by a LiPo battery and utilizes a RF transmitter as well as its onboard wifi for communication. The housing was designed in Solidworks and 3D printed from PETG with a household FDM printer. The Pi acts as a wifi hotspot and serves a webapp when it is connected to. The webapp was built with html and bootstrap css, and integrates with the Raspberry-Pi through wifi, allowing users to enter information. The Pi uses an RF module to transmit this data to a receiver, which processes the information allowing the users information to be seen by the rest of the world.
The drone is outfitted with a remote-actuated servo, which acts as the deployment mechanism for the module. The module uses a hand-sewn parachute to slow its decent and lower the shock load from ground impact, protecting the electronics inside.
Challenges we ran into
We ran into many interesting challenges during this project. We went through extensive troubleshooting for our 3D-printed module housing to fix printing errors and optimize the model. Eventually we reached a solution we were happy with. We also had no previous experience making parachutes, and had to quickly learn the basics of designing, sizing, and constructing a parachute that would sufficiently reduce the fall speed of our module.
During the application of the webapp we found it difficult to make the service always deploy, but after finding out a ton about how servers work, we now are able to serve the webpage given any http request.
Accomplishments that we're proud of
We are very proud of the web app and communications interface we built. In a limited amount of time, we built a functional app that, while barebones, provides a framework for potentially lifesaving disaster recovery efforts. We also did several things successfully that we had never done before: we built a parachute with no prior experience, designed a deployment mechanism to release the module, and retrofit a drone to carry and deliver a DisasterLink module.
What we learned
We learned a lot about how servers work, as well as how to efficiently pass data from one source to another. Our team has not worked together before and has expertise in a wide range of disciplines, so we learned a lot from each other. Some of us had experience with 3D printing, some of us had experience with software and web development, some of us had experience with CAD modeling and mechanical design calculations, and working together allowed us to learn more about these topics from each other.
What's next for DisasterLink
The DisasterLink team is proud of what we accomplished by working together. With enough interest and support, there are a lot of improvements to make to this project to advance it toward a stage where it may be deployed in an actual disaster situation. This prototype is made with methods and materials conducive to an initial proof of concept. Next steps would include using stronger, lighter materials for the housing, a more robust mounting interface for the electronics to help resist shock and environmental damage, sealing the housing from moisture and particulate ingress, using more robust solutions for deployment and attachment mechanisms, and using a more standardized drone design that is tailored specifically for this application.
With the right support, DisasterLink could soon provide needed information to disaster responders, allowing them to gain valuable information and provide targeted aid to areas that need it most. The communication and information gathering that DisasterLink provides could provide peace of mind to family and friends of those affected and allow recovery efforts to be streamlined.
Built With
- 3dprinting
- arduino
- bootstrap
- excel
- go
- html5
- inkscape
- publisher
- raspberry-pi
- solidworks
- uavs
- wi-fi


Log in or sign up for Devpost to join the conversation.